TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025171303
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024076501
出願日
2024-05-09
発明の名称
画像形成装置及び駆動装置
出願人
キヤノン株式会社
代理人
弁理士法人中川国際特許事務所
主分類
B65H
7/02 20060101AFI20251113BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】移動体の位置制御を行うものにおいて、通信時間に遅延があってもコスト増を招くことなく移動体の位置制御を正確に行える駆動装置及び画像形成装置を提供する。
【解決手段】移動体を移動させる駆動手段と、前記移動体が所定位置に移動したことを検知する検知手段と、前記移動体が前記所定位置に移動したことを示す信号を前記検知手段から受信することに応答して前記移動体を目標位置まで移動させる指示信号を前記駆動手段に送信する制御手段とを有し、前記制御手段は、前記移動体の移動が前記所定位置から前記目標位置までの移動量よりも少ない移動量となるように前記駆動手段を所定量駆動させた後、少なくとも前記移動体が前記所定位置に移動したことを前記検知手段が検知してから前記移動体を前記目標位置まで移動させる前記指示信号を前記駆動手段が受信するまで前記移動体の移動を所定時間休止するように前記駆動手段を制御する。
【選択図】図6
特許請求の範囲
【請求項1】
移動体を移動させる駆動手段と、
前記移動体が所定位置に移動したことを検知する検知手段と、
前記移動体が前記所定位置に移動したことを示す信号を前記検知手段から受信することに応答して前記移動体を目標位置まで移動させる指示信号を前記駆動手段に送信する制御手段と、を有し、
前記制御手段は、前記移動体の移動が前記所定位置から前記目標位置までの移動量よりも少ない移動量となるように前記駆動手段を所定量駆動させた後、少なくとも前記移動体が前記所定位置に移動したことを前記検知手段が検知してから前記移動体を前記目標位置まで移動させる前記指示信号を前記駆動手段が受信するまで前記移動体の移動を所定時間休止するように前記駆動手段を制御することを特徴とする駆動装置。
続きを表示(約 1,700 文字)
【請求項2】
前記移動体が前記所定位置に移動したことを示す信号を前記検知手段から前記制御手段が受信することに応答して前記移動体を目標位置まで移動させる前記指示信号は、前記移動体の前記所定時間の移動休止を伴わずに前記駆動手段を駆動させる信号であることを特徴とする請求項1に記載の駆動装置。
【請求項3】
前記制御手段は、前記駆動手段が前記移動体を前記所定位置から前記目標位置まで移動させる駆動量と前記移動体が前記所定位置に移動したことを前記検知手段が検知してから前記所定時間の移動休止する位置まで前記移動体を移動させる駆動量との差分を、前記移動体を前記目標位置まで移動させる指示信号として前記駆動手段に送信することを特徴とする請求項1に記載の駆動装置。
【請求項4】
前記制御手段は、前記駆動手段が前記移動体を前記所定位置から前記目標位置まで移動させる駆動量と前記移動体が前記所定位置に移動したことを前記検知手段が検知してから前記所定時間の移動休止する位置まで前記移動体を移動させる駆動量との差分を、前記移動体を前記目標位置まで移動させる指示信号として前記駆動手段に送信することを特徴とする請求項2に記載の駆動装置。
【請求項5】
前記検知手段が前記移動体を既に検知した状態で前記移動体が停止している場合は、前記制御手段は、前記移動体を前記目標位置とは逆方向に前記検知手段が検知しない位置まで移動するように前記駆動手段を駆動させることを特徴とする請求項1に記載の駆動装置。
【請求項6】
前記検知手段が前記移動体を既に検知した状態で前記移動体が停止している場合は、前記制御手段は、前記移動体を前記目標位置とは逆方向に前記検知手段が検知しない位置まで前記所定時間の移動休止を伴わずに移動するように前記駆動手段を駆動させることを特徴とする請求項1に記載の駆動装置。
【請求項7】
前記制御手段は、前記検知手段が前記移動体を既に検知した状態で前記移動体が停止している場合に、前記検知手段が前記移動体を検知しない位置まで前記移動体が移動してから停止するまでに前記駆動手段が前記移動体を移動させた駆動量と前記駆動手段が前記移動体を前記所定位置から前記目標位置までの移動させる駆動量との合計を、前記移動体を前記目標位置まで移動させる指示信号として前記駆動手段に送信することを特徴とする請求項5に記載の駆動装置。
【請求項8】
前記制御手段は、前記検知手段が前記移動体を既に検知した状態で前記移動体が停止している場合に、前記検知手段が前記移動体を検知しない位置まで前記移動体が移動してから停止するまでに前記駆動手段が前記移動体を移動させた駆動量と前記駆動手段が前記移動体を前記所定位置から前記目標位置までの移動させる駆動量との合計を、前記移動体を前記目標位置まで前記所定時間の移動休止を伴わずに移動させる指示信号として前記駆動手段に送信することを特徴とする請求項5に記載の駆動装置。
【請求項9】
前記制御手段は、前記検知手段が前記移動体を既に検知した状態で前記移動体が停止している場合に、前記検知手段が前記移動体を検知しない位置まで前記移動体が移動してから停止するまでに前記駆動手段が前記移動体を移動させた駆動量と前記駆動手段が前記移動体を前記所定位置から前記目標位置までの移動させる駆動量との合計を、前記移動体を前記目標位置まで移動させる指示信号として前記駆動手段に送信することを特徴とする請求項6に記載の駆動装置。
【請求項10】
前記制御手段は、前記検知手段が前記移動体を既に検知した状態で前記移動体が停止している場合に、前記検知手段が前記移動体を検知しない位置まで前記移動体が移動してから停止するまでに前記駆動手段が前記移動体を移動させた駆動量と前記駆動手段が前記移動体を前記所定位置から前記目標位置までの移動させる駆動量との合計を、前記移動体を前記目標位置まで前記所定時間の移動休止を伴わずに移動させる指示信号として前記駆動手段に送信することを特徴とする請求項6に記載の駆動装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、プリンタ、複写機、ファクシミリ装置、または、これらの複数の機能を備えた複合機などの画像形成装置及びそのような画像形成装置等に用いられる駆動装置に関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
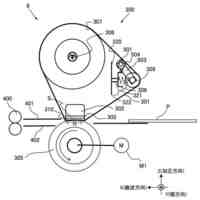
画像形成装置おいては、メカ部材を所定位置に移動させることで機能するものがある。そのためにメカ部材を一旦初期ホームポジション位置まで移動させ、この初期ホームポジション位置から前記所定位置までの距離を移動させることでメカ部材を前記所定位置に移動させるようにするものがある。
【0003】
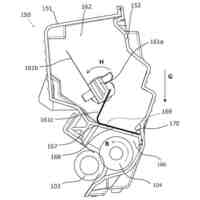
例えば、画像形成したシートを積載する積載部においてシートを整合する整合部材は、シートのサイズに合わせて位置出しをする必要がある。そのために、整合部材が基準となる位置に移動したことを検知するホームポジションセンサを設け、この基準となる位置から整合部材を所定量移動させてシートを押圧することで、シートを所望の位置に整合するように制御している。
【0004】
一方、画像形成装置では、省スペース性を目的としてユニットや基板の単位で分割を行い、それらを、通信接続を介して協調動作させる構成をとることがある。メカ部材の位置制御において、このようにサブ基板のセンサやモータの入出力操作が通信接続を介して行われる場合、メカ部材の可動領域がスペースの狭さのために限定的な場合などでは、通信時間の遅延が問題となることがある。
【0005】
そこで、例えば、特許文献1では、初期の位置出しを行うために、2つのセンサと櫛歯状のセンサフラグを用いてセンサフラグの形状パターンを識別することで、移動体の少ない移動に対してもその移動位置を検出可能としたものが提案されている。
【先行技術文献】
【特許文献】
【0006】
特開2009-222488号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、センサを複数備えることや形状に特徴を持たせたセンサフラグを設けることは、部品コストの増加につながるといった問題があった。
【0008】
本発明は以上事情に鑑みなされたもので、通信により移動体の位置制御を行うものにおいて、通信時間に遅延があってもコスト増を招くことなく移動体の位置制御を正確に行える駆動装置及び画像形成装置を提供しようとするものである。
【課題を解決するための手段】
【0009】
上記目的を達成するために本発明は、移動体を移動させる駆動手段と、前記移動体が所定位置に移動したことを検知する検知手段と、前記移動体が前記所定位置に移動したことを示す信号を前記検知手段から受信することに応答して前記移動体を目標位置まで移動させる指示信号を前記駆動手段に送信する制御手段とを有し、前記制御手段は、前記移動体の移動が前記所定位置から前記目標位置までの移動量よりも少ない移動量となるように前記駆動手段を所定量駆動させた後、少なくとも前記移動体が前記所定位置に移動したことを前記検知手段が検知してから前記移動体を前記目標位置まで移動させる前記指示信号を前記駆動手段が受信するまで前記移動体の移動を所定時間休止するように前記駆動手段を制御する駆動装置及び画像形成装置とするものである。
【発明の効果】
【0010】
本発明によれば、通信により移動体の位置制御を行うものにおいて、通信時間に遅延があってもコスト増を招くことなく移動体の位置制御を正確に行える駆動装置及び画像形成装置を提供できるものである。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キヤノン株式会社
容器
27日前
キヤノン株式会社
容器
21日前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
13日前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
定着装置
6日前
キヤノン株式会社
記録装置
6日前
キヤノン株式会社
定着装置
6日前
キヤノン株式会社
定着装置
6日前
キヤノン株式会社
記録装置
1か月前
キヤノン株式会社
撮影装置
1か月前
キヤノン株式会社
現像容器
1か月前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
定着装置
1か月前
キヤノン株式会社
定着装置
今日
キヤノン株式会社
撮像装置
今日
キヤノン株式会社
撮像装置
今日
キヤノン株式会社
測距装置
15日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
現像装置
1か月前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
記録装置
13日前
キヤノン株式会社
現像装置
1か月前
キヤノン株式会社
記録装置
13日前
キヤノン株式会社
電子機器
13日前
キヤノン株式会社
雲台装置
13日前
キヤノン株式会社
撮像装置
13日前
キヤノン株式会社
測距装置
1か月前
キヤノン株式会社
現像容器
1か月前
キヤノン株式会社
電子機器
8日前
キヤノン株式会社
撮像装置
8日前
キヤノン株式会社
撮像装置
27日前
キヤノン株式会社
撮像装置
27日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ