TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025170420
公報種別
公開特許公報(A)
公開日
2025-11-18
出願番号
2025146224,2024232861
出願日
2025-09-03,2019-12-31
発明の名称
ビデオ処理方法、ビデオ処理装置および符号ストリーム生成方法
出願人
エスゼット ディージェイアイ テクノロジー カンパニー リミテッド
,
SZ DJI TECHNOLOGY CO.,LTD
代理人
弁理士法人栄光事務所
主分類
H04N
19/52 20140101AFI20251111BHJP(電気通信技術)
要約
【課題】符号化復号操作を簡略化するビデオ処理方法、ビデオ処理装置および符号ストリーム生成方法を提供する。
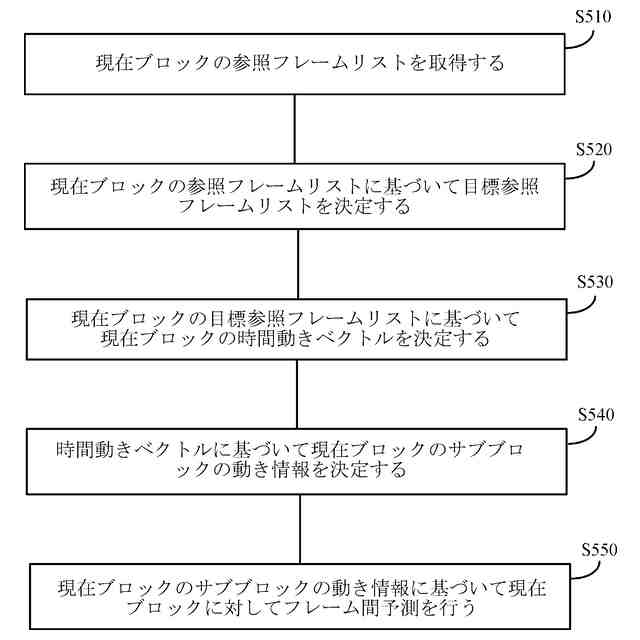
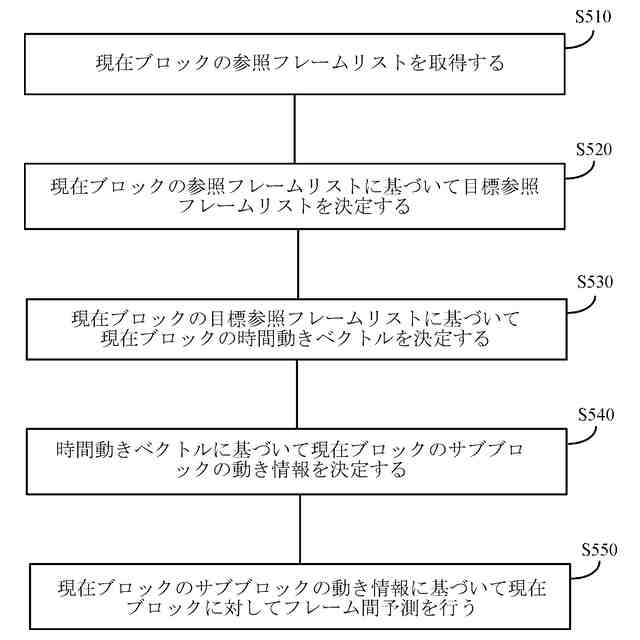
【解決手段】双方向予測プロセスにおいて走査しなければならない参照フレームリストの数を制限することによって、符号化復号操作を簡略化することができるビデオ処理方法であって、現在ブロックの時間動きベクトルを決定することと、時間動きベクトルに基づいて現在ブロックのサブブロックの動き情報を決定することと、現在ブロックのサブブロックの動き情報に基づいて現在ブロックに対してフレーム間予測を行うことと、を含む。
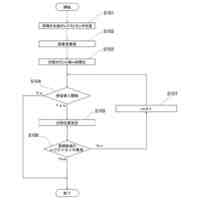
【選択図】図5
特許請求の範囲
【請求項1】
ビデオ処理方法であって、
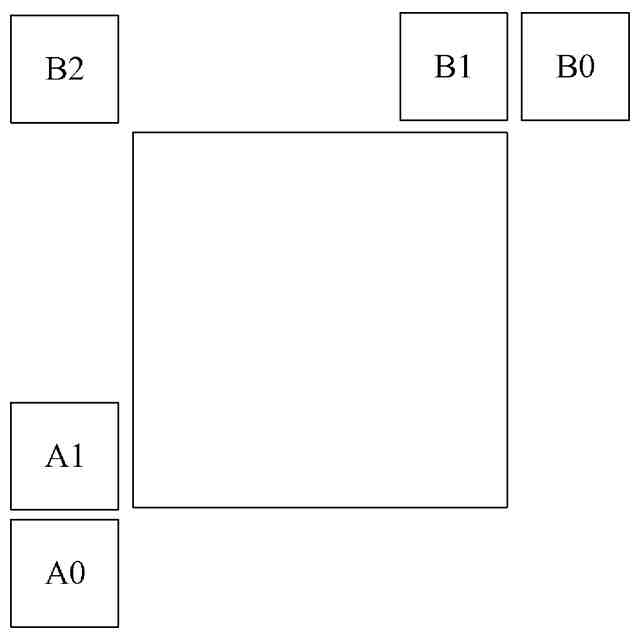
現在ブロックの特定位置における空間隣接ブロックの動きベクトルを決定することと、
双方向予測のために、まず、前記現在ブロックの現在の参照方向における参照フレームリストを走査することと、
前記現在の参照方向における前記現在ブロックの前記空間隣接ブロックの動きベクトルの参照フレームが前記現在ブロックのコロケーテッドフレームと同じである場合、前記空間隣接ブロックの動きベクトルを時間動きベクトルとして決定することと、
前記現在の参照方向における前記空間隣接ブロックの前記動きベクトルの前記参照フレームが前記現在ブロックの前記コロケーテッドフレームと異なる場合、別の参照方向における参照フレームリストの走査を継続することと、
別の参照方向における前記空間隣接ブロックの前記動きベクトルの参照フレームが前記現在ブロックの前記コロケーテッドフレームと同じである場合、前記空間隣接ブロックの前記動きベクトルを前記時間動きベクトルとして決定することと、
別の参照方向における前記空間隣接ブロックの前記動きベクトルの前記参照フレームが前記現在ブロックの前記コロケーテッドフレームと異なる場合、ゼロ動きベクトルを前記時間動きベクトルとして決定することと、を含む、ビデオ処理方法。
続きを表示(約 2,500 文字)
【請求項2】
請求項1に記載のビデオ処理方法であって、
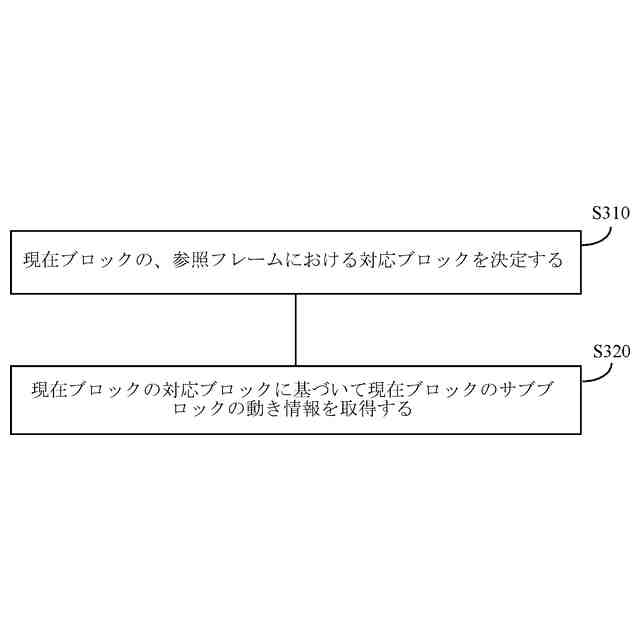
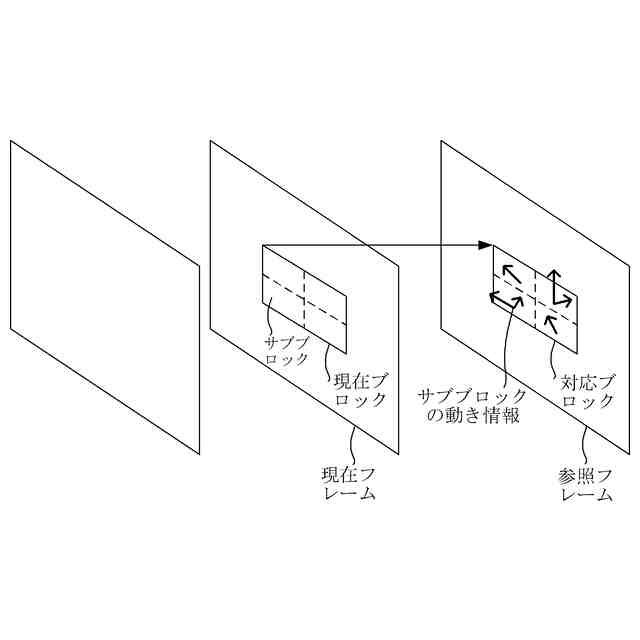
前記時間動きベクトルに基づいて参照フレームにおける前記現在ブロックの対応ブロックを決定することと、
前記参照フレームにおける前記現在ブロックの前記対応ブロックに基づいて、前記現在ブロックのサブブロックの動き情報を決定することと、を更に含む、ビデオ処理方法。
【請求項3】
請求項1に記載のビデオ処理方法であって、
前記現在ブロックの前記特定位置における前記空間隣接ブロックは、前記現在ブロックの左ブロック、上ブロック、又は左上ブロックである、ビデオ処理方法。
【請求項4】
請求項1から3のいずれか一項に記載のビデオ処理方法であって、
前記現在ブロックの予測ブロックを決定することと、
前記現在ブロックの初期ブロックと前記予測ブロックとに基づいて、前記現在ブロックの残差ブロックを計算することと、を更に含む、ビデオ処理方法。
【請求項5】
請求項1から3のいずれか一項に記載のビデオ処理方法であって、
前記現在ブロックの予測ブロックと残差ブロックとを決定することと、
前記現在ブロックの前記予測ブロックと前記残差ブロックとに基づいて、前記現在ブロックの再構成ブロックを計算することと、を更に含む、ビデオ処理方法。
【請求項6】
請求項1から3のいずれか一項に記載のビデオ処理方法であって、
前記現在ブロックのサブブロックの動き情報に基づいて、サブブロック単位で前記現在ブロックに対するフレーム間予測を実行することと、を更に含む、ビデオ処理方法。
【請求項7】
請求項1に記載のビデオ処理方法であって、
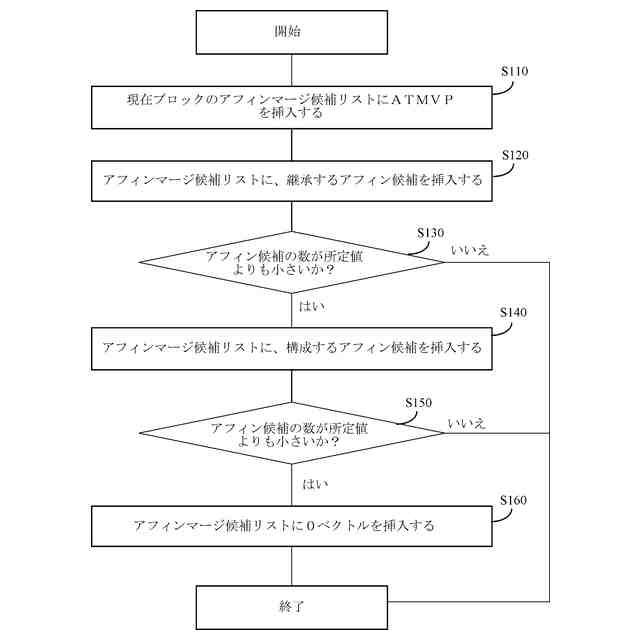
前記現在ブロックの候補リストに候補を挿入することと、前記候補は、前記時間動きベクトルを用いて前記現在ブロックのサブブロックの動き情報を決定することを示し、
前記現在ブロックの前記候補リストに継承するアフィン候補を挿入することと、
前記候補リスト内の候補数が設定値より少ないことに応答して、前記候補リストに構築するアフィン候補を挿入することと、前記構築するアフィン候補は、前記現在ブロックの隣接ブロックの動き情報を組み合わせて得られ、
前記構築するアフィン候補を挿入した後、前記候補リスト内の候補数が前記設定値より少ないことに応答して、ゼロベクトルを前記候補リストに挿入することと、を更に含む、ビデオ処理方法。
【請求項8】
請求項7に記載のビデオ処理方法であって、
前記現在ブロックの前記候補リストに前記継承するアフィン候補を挿入することは、前記現在ブロックの隣接ブロックの制御点動きベクトルを、前記現在ブロックの前記アフィン候補として前記現在ブロックの前記候補リストに挿入することを含む、ビデオ処理方法。
【請求項9】
ビデオ処理装置であって、
コードを記憶するためのメモリと、
前記メモリに記憶された前記コードを実行するように構成されたプロセッサとを含み、前記プロセッサが、
現在ブロックの特定位置における空間隣接ブロックの動きベクトルを決定することと、
双方向予測のために、まず、前記現在ブロックの現在の参照方向における参照フレームリストを走査することと、
前記現在の参照方向における前記現在ブロックの前記空間隣接ブロックの動きベクトルの参照フレームが前記現在ブロックのコロケーテッドフレームと同じである場合、前記空間隣接ブロックの動きベクトルを時間動きベクトルとして決定することと、
前記現在の参照方向における前記空間隣接ブロックの前記動きベクトルの前記参照フレームが前記現在ブロックの前記コロケーテッドフレームと異なる場合、別の参照方向における参照フレームリストの走査を継続することと、
別の参照方向における前記空間隣接ブロックの前記動きベクトルの参照フレームが前記現在ブロックの前記コロケーテッドフレームと同じである場合、前記空間隣接ブロックの前記動きベクトルを前記時間動きベクトルとして決定することと、
別の参照方向における前記空間隣接ブロックの前記動きベクトルの前記参照フレームが前記現在ブロックの前記コロケーテッドフレームと異なる場合、ゼロ動きベクトルを前記時間動きベクトルとして決定することと、を実行するよう構成されている、ビデオ処理装置。
【請求項10】
符号ストリーム生成方法であって、
現在ブロックの特定位置における空間隣接ブロックの動きベクトルを決定することと、
双方向予測のために、まず、前記現在ブロックの現在の参照方向における参照フレームリストを先に走査することと、
前記現在の参照方向における前記現在ブロックの前記空間隣接ブロックの動きベクトルの参照フレームが前記現在ブロックのコロケーテッドフレームと同じである場合、前記空間隣接ブロックの動きベクトルを時間動きベクトルとして決定することと、
前記現在の参照方向における前記空間隣接ブロックの前記動きベクトルの前記参照フレームが前記現在ブロックの前記コロケーテッドフレームと異なる場合、別の参照方向における参照フレームリストの走査を継続することと、
別の参照方向における前記空間隣接ブロックの前記動きベクトルの参照フレームが前記現在ブロックの前記コロケーテッドフレームと同じである場合、前記空間隣接ブロックの前記動きベクトルを前記時間動きベクトルとして決定することと、
別の参照方向における前記空間隣接ブロックの前記動きベクトルの前記参照フレームが前記現在ブロックの前記コロケーテッドフレームと異なる場合、ゼロ動きベクトルを前記時間動きベクトルとして決定することと、を含む、符号ストリーム生成方法。
発明の詳細な説明
【技術分野】
【0001】
著作権に関する声明
本特許文書が開示する内容は、著作権保護を受ける資料を含む。この著作権は著作権所有者が所有する。著作権所有者は、いかなる人が、特許商標局の公式記録および書類の中に存在するこの特許文書もしくはこの特許開示を複製することにも反対しない。
続きを表示(約 2,600 文字)
【0002】
本願はビデオ符号化復号の分野に関し、かつ、より具体的には、ビデオ処理方法、ビデオ処理装置および符号ストリーム生成方法に関する。
【背景技術】
【0003】
ビデオ符号化プロセスはフレーム間予測プロセスを含む。フレーム間予測のモードはmergeモードと非mergeモードとを含む。mergeモードでは通常、まず、mergeモードの動きベクトル候補リストを構築するとともに、mergeモードの動きベクトル候補リストの中から現在ブロックの動きベクトルを選び取らなければならない。現在ブロックは、現在符号化ユニット(coding unit,CU)と称してもよい。
【0004】
符号化技術が発展するのに伴い、フレーム間予測方式に代替/高度時間動きベクトル予測(alternative/advanced temporal motion vector prediction,ATMVP)技術が導入されている。ATMVP技術では、現在ブロックが複数のサブブロックに区分され、サブブロックの動き情報を計算する。ATMVP技術は、サブブロックレベルの動きベクトル予測を導入することで、ビデオの全体的符号化性能を向上させることを目的とする。
【0005】
ATMVP技術を利用して現在ブロックのサブブロックの動き情報を探すプロセスは比較的複雑であり、いくつかの冗長な操作が存在しており、このプロセスには改良の余地が依然としてある。
【発明の概要】
【課題を解決するための手段】
【0006】
本願は、符号化復号操作を簡略化することができるビデオ処理方法、ビデオ処理装置および符号ストリーム生成方法を提供する。
【0007】
第1の態様では、現在ブロックの特定位置における空間隣接ブロックの動きベクトルを決定することと、双方向予測のために、まず、前記現在ブロックの現在の参照方向における参照フレームリストを走査することと、前記現在の参照方向における前記現在ブロックの前記空間隣接ブロックの動きベクトルの参照フレームが前記現在ブロックのコロケーテッドフレームと同じである場合、前記空間隣接ブロックの動きベクトルを時間動きベクトルとして決定することと、前記現在の参照方向における前記空間隣接ブロックの前記動きベクトルの前記参照フレームが前記現在ブロックの前記コロケーテッドフレームと異なる場合、別の参照方向における参照フレームリストの走査を継続することと、別の参照方向における前記空間隣接ブロックの前記動きベクトルの参照フレームが前記現在ブロックの前記コロケーテッドフレームと同じである場合、前記空間隣接ブロックの前記動きベクトルを前記時間動きベクトルとして決定することと、別の参照方向における前記空間隣接ブロックの前記動きベクトルの前記参照フレームが前記現在ブロックの前記コロケーテッドフレームと異なる場合、ゼロ動きベクトルを前記時間動きベクトルとして決定することと、を含む、ビデオ処理方法を提供する。
【0008】
第2の態様では、コードを記憶するためのメモリと、前記メモリに記憶された前記コードを実行するように構成されたプロセッサとを含み、前記プロセッサが、現在ブロックの特定位置における空間隣接ブロックの動きベクトルを決定することと、双方向予測のために、まず、前記現在ブロックの現在の参照方向における参照フレームリストを走査することと、前記現在の参照方向における前記現在ブロックの前記空間隣接ブロックの動きベクトルの参照フレームが前記現在ブロックのコロケーテッドフレームと同じである場合、前記空間隣接ブロックの動きベクトルを時間動きベクトルとして決定することと、前記現在の参照方向における前記空間隣接ブロックの前記動きベクトルの前記参照フレームが前記現在ブロックの前記コロケーテッドフレームと異なる場合、別の参照方向における参照フレームリストの走査を継続することと、別の参照方向における前記空間隣接ブロックの前記動きベクトルの参照フレームが前記現在ブロックの前記コロケーテッドフレームと同じである場合、前記空間隣接ブロックの前記動きベクトルを前記時間動きベクトルとして決定することと、別の参照方向における前記空間隣接ブロックの前記動きベクトルの前記参照フレームが前記現在ブロックの前記コロケーテッドフレームと異なる場合、ゼロ動きベクトルを前記時間動きベクトルとして決定することと、を実行するよう構成されている、ビデオ処理装置を提供する。
【0009】
第3の態様では、現在ブロックの特定位置における空間隣接ブロックの動きベクトルを決定することと、双方向予測のために、まず、前記現在ブロックの現在の参照方向における参照フレームリストを先に走査することと、前記現在の参照方向における前記現在ブロックの前記空間隣接ブロックの動きベクトルの参照フレームが前記現在ブロックのコロケーテッドフレームと同じである場合、前記空間隣接ブロックの動きベクトルを時間動きベクトルとして決定することと、前記現在の参照方向における前記空間隣接ブロックの前記動きベクトルの前記参照フレームが前記現在ブロックの前記コロケーテッドフレームと異なる場合、別の参照方向における参照フレームリストの走査を継続することと、別の参照方向における前記空間隣接ブロックの前記動きベクトルの参照フレームが前記現在ブロックの前記コロケーテッドフレームと同じである場合、前記空間隣接ブロックの前記動きベクトルを前記時間動きベクトルとして決定することと、別の参照方向における前記空間隣接ブロックの前記動きベクトルの前記参照フレームが前記現在ブロックの前記コロケーテッドフレームと異なる場合、ゼロ動きベクトルを前記時間動きベクトルとして決定することと、を含む、符号ストリーム生成方法を提供する。
【0010】
第4の態様では、コードを記憶するためのメモリと、前記メモリに記憶されたコードを実行することで、第1の態様、第2の態様または第3の態様における方法を実行するためのプロセッサと、を含むビデオ処理装置を提供する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
イヤーピース
11日前
個人
イヤーマフ
25日前
個人
監視カメラシステム
1か月前
個人
スイッチシステム
19日前
キーコム株式会社
光伝送線路
1か月前
サクサ株式会社
中継装置
1か月前
個人
スキャン式車載用撮像装置
1か月前
サクサ株式会社
中継装置
1か月前
WHISMR合同会社
収音装置
2か月前
アイホン株式会社
電気機器
2か月前
キヤノン株式会社
撮像装置
2か月前
キヤノン電子株式会社
画像読取装置
11日前
個人
映像表示装置、及びARグラス
20日前
キヤノン電子株式会社
画像読取装置
2か月前
株式会社リコー
画像形成装置
27日前
サクサ株式会社
無線通信装置
1か月前
株式会社リコー
画像形成装置
2か月前
サクサ株式会社
無線システム
1か月前
キヤノン電子株式会社
画像読取装置
1か月前
株式会社リコー
画像形成装置
2か月前
ヤマハ株式会社
放音制御装置
19日前
キヤノン電子株式会社
画像読取装置
19日前
サクサ株式会社
無線通信装置
1か月前
個人
ワイヤレスイヤホン対応耳掛け
2か月前
個人
発信機及び発信方法
1か月前
キヤノン株式会社
撮像システム
2か月前
キヤノン株式会社
画像処理装置
14日前
キヤノン電子株式会社
シート搬送装置
11日前
日本電気株式会社
海底分岐装置
1か月前
シャープ株式会社
表示装置
11日前
シャープ株式会社
表示装置
11日前
株式会社松平商会
携帯機器カバー
2か月前
株式会社NTTドコモ
端末
1か月前
大日本印刷株式会社
写真撮影装置
2か月前
有限会社フィデリックス
マイクロフォン
1か月前
沖電気工業株式会社
画像形成装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ