TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025167608
公報種別
公開特許公報(A)
公開日
2025-11-07
出願番号
2024072405
出願日
2024-04-26
発明の名称
衝突回避方法、及び衝突回避装置
出願人
日産自動車株式会社
代理人
弁理士法人樹之下知的財産事務所
主分類
B60W
30/08 20120101AFI20251030BHJP(車両一般)
要約
【課題】先行車両への衝突を回避可能な衝突回避方法、及び衝突回避装置を提供する。
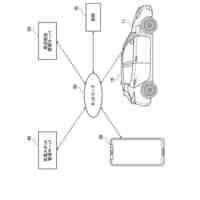
【解決手段】コントローラは、自車両の位置及び速度を取得し、先行車両の位置及び速度を取得し、自車両の位置及び速度と、先行車両の位置及び速度とに基づいて衝突予測時間を算出し、隣接車線を走行する隣接車両を検出し、車線の境界を検出し、衝突予測時間が制動回避限界となるタイミングでの先行車両の位置及び速度と、制動回避限界での前記自車両の位置及び速度とを推算し、制動回避限界での自車両及び先行車両の位置及び速度と、隣接車両の位置と、自車線の境界の位置とに基づいて、先行車両の位置に対して安全マージン以上の距離を確保し、かつ自車両が進入可能なフリースペースを選出し、衝突予測時間が制動回避限界以下となる場合に、フリースペースに向かって自車両を移動させる。
【選択図】図3
特許請求の範囲
【請求項1】
コンピュータを用いて自車両の前方を走行する先行車両への前記自車両の衝突を回避する衝突回避方法であって、
前記自車両の位置及び速度を取得する自車両走行情報取得ステップと、
前記先行車両の位置及び速度を取得する先行車両走行情報取得ステップと、
前記自車両の位置及び速度と、前記先行車両の位置及び速度とに基づいて衝突予測時間を算出する衝突予測時間算出ステップと、
前記自車両が走行する自車線に隣接する隣接車線を走行する他車両である隣接車両を検出する隣接車両検出ステップと、
車線の境界を検出する車線境界検出ステップと、
前記衝突予測時間が制動回避限界となるタイミングでの前記先行車両の位置及び速度と、前記制動回避限界での前記自車両の位置及び速度とを推算する制動限界状況算出ステップと、
前記制動回避限界での前記先行車両の位置及び速度と、前記制動回避限界での前記自車両の位置及び速度と、前記隣接車両の位置と、前記自車線の境界の位置とに基づいて、前記先行車両の位置に対して所定の安全マージン以上の距離を確保し、かつ前記自車両が進入可能なフリースペースを選出するフリースペース選出ステップと、
前記自車両の位置及び速度と、前記衝突予測時間が前記制動回避限界以下となる場合に、前記フリースペースに向かって前記自車両を移動させる制動操舵制御ステップと、
を実施する衝突回避方法。
続きを表示(約 1,200 文字)
【請求項2】
前記隣接車両検出ステップで前記隣接車両が検出されない場合、前記フリースペース選出ステップにおいて前記隣接車線内の前記フリースペースを選出する、
請求項1に記載の衝突回避方法。
【請求項3】
前記フリースペース選出ステップにおいて、前記先行車両と前記隣接車線の前記自車線と反対側の境界との間の前記フリースペースを選出する、
請求項2に記載の衝突回避方法。
【請求項4】
前記自車両と前記隣接車両との相対位置が、時間経過とともに離れる場合、前記フリースペース選出ステップにおいて、前記隣接車線内の前記フリースペースを選出する、
請求項2に記載の衝突回避方法。
【請求項5】
前記隣接車両検出ステップで前記隣接車両が検出された場合、前記フリースペース選出ステップにおいて、前記隣接車線とは異なる位置で、前記自車線の近傍の前記フリースペースを選出する、
請求項1に記載の衝突回避方法。
【請求項6】
前記自車両と前記隣接車両との相対位置が、時間経過とともに近づく場合、前記フリースペース選出ステップにおいて、前記隣接車線とは異なる位置で、前記自車線近傍の前記フリースペースを選出する、
請求項5に記載の衝突回避方法。
【請求項7】
前記境界は、路面上に印刷されるソフトバウンダリと、路面に立設されるハードバウンダリとを含み、
前記フリースペース選出ステップにおいて、前記先行車両と前記自車線の前記ソフトバウンダリとの間に前記フリースペースを選出する、
請求項6に記載の衝突回避方法。
【請求項8】
前記境界は、路面上に印刷されるソフトバウンダリと、路面に立設されるハードバウンダリとを含み、
前記フリースペース選出ステップにおいて、前記先行車両と前記自車線の前記ハードバウンダリとの間の前記フリースペースを選出する、
請求項6に記載の衝突回避方法。
【請求項9】
前記フリースペース選出ステップにおいて、前記隣接車両と前記先行車両との間の前記フリースペースを選出する、
請求項6に記載の衝突回避方法。
【請求項10】
前記境界は、路面上に印刷されるソフトバウンダリと、路面に立設されるハードバウンダリとを含み、
前記フリースペース選出ステップで複数の前記フリースペースが検出される場合、前記制動操舵制御ステップにおいて、前記隣接車線内の前記フリースペース、前記先行車両と前記自車線の前記ソフトバウンダリとの間の前記フリースペース、前記先行車両と前記自車線の前記ハードバウンダリとの間の前記フリースペース、前記隣接車両と前記先行車両との間の前記フリースペースの順に優先して前記フリースペースに向かって前記自車両を移動させる、
請求項1に記載の衝突回避方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両における衝突回避方法、及び衝突回避装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
車両の自動運転に関する技術として、自車両の前を走行する先行車両の横方向の速度に基づいて、自車両が先行車両への衝突を回避する操舵操作を行う技術が知られている(例えば、特許文献1参照)。この特許文献1では、先行車両の横方向の速度及び加速度を算出し、これらの横方向の速度及び加速度の方向と度合いに応じて、自車両を左右のいずれに回避させるかを判定する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2020/066646号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1では、先行車両が障害物を避けた場合のみ、つまり、横方向の加速度や速度が発生した時のみの回避動作しか考慮されていない。したがって、先行車両が急停止する等の横方向の動きがない場合や、横方向の動きが遅れた場合などでは、回避が困難となり、衝突の可能性も高くなる。
【0005】
本発明は、先行車両への衝突の可能性を低減する衝突回避方法、及び衝突回避装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の衝突回避方法は、コンピュータを用いて自車両と先行車両との衝突を回避する衝突回避方法であって、当該コンピュータは、自車両の位置及び速度と、先行車両の位置及び速度とに基づいて衝突予測時間を算出し、隣接車線を走行する隣接車両、及び、車線の境界を検出し、衝突予測時間が制動回避限界となるタイミングでの自車両及び先行車両の位置及び速度と、隣接車両の位置と、車線の境界とに基づいて、先行車両から安全マージン以上の距離を確保したフリースペースを選出し、衝突予測時間が制動回避時間以下となる場合に、選出したフリースペースに向かって自車両を移動させる。
【発明の効果】
【0007】
本発明の衝突回避方法では、制動回避限界での先行車両と自車両との相対位置や相対速度、隣接車両の位置、車線の境界に基づいて、先行車両との衝突を回避可能なフリースペースを選出し、衝突予測時間が制動予測限界以下となる場合に、そのフリースペースに向かって自車両の制動及び操舵を行う。このため、先行車両の横方向の動きの有無にかかわらず、自車両の先行車両への衝突の可能性を低減できる。
【図面の簡単な説明】
【0008】
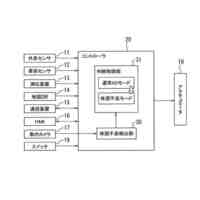
本開示の一実施形態に係る衝突回避装置を搭載する車両の概略構成を示す模式図。
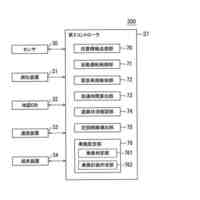
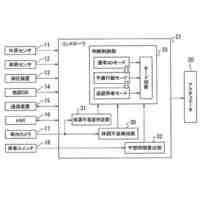
本実施形態のコントローラの構成、及びプロセッサの機能構成を示すブロック図。
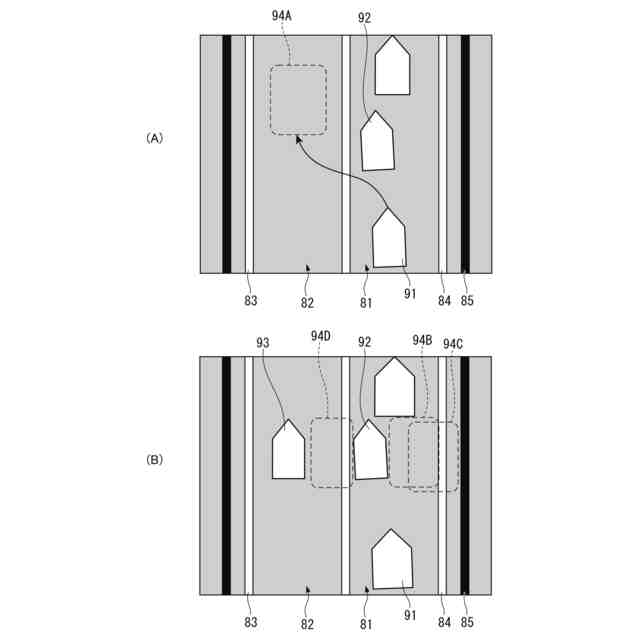
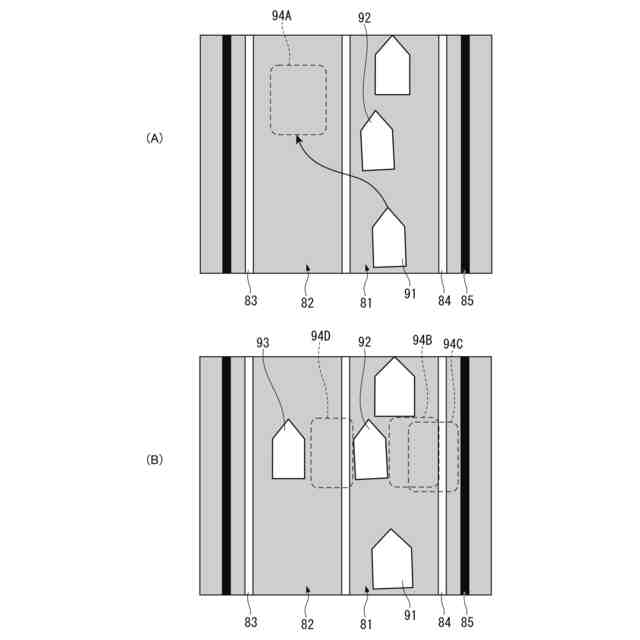
フリースペース選出部により選出されるフリースペースの例を示す模式図。
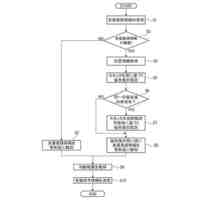
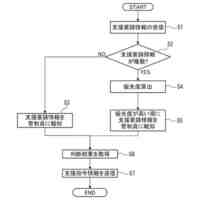
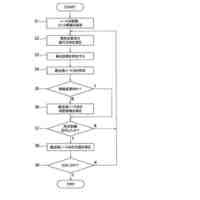
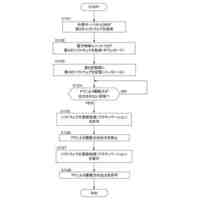
本実施形態の追突回避方法の一例を示すフローチャート。
【発明を実施するための形態】
【0009】
以下、本開示の一実施形態に係る衝突回避方法及び衝突回避装置について説明する。
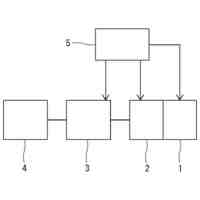
図1は、本実施形態に係る衝突回避装置を搭載する車両の概略構成を示す模式図である。本実施形態の車両は、図1に示すように、走行駆動部10、外界認識センサ20、走行測定装置30、及びコントローラ40を含んで構成されている。
走行駆動部10は、例えば、駆動源101、駆動伝達機構102、駆動輪103、操舵機構104、制動機構105、駆動制御装置106、操舵制御装置107、及び制動制御装置108等を含んで構成されている。
駆動源101は、電動モータやエンジン等により構成され、駆動力を発生させる。駆動伝達機構102は、駆動源101の駆動力を所定のギア比で減速して駆動輪103に伝達し、駆動輪103を駆動して車両を走行させる。
操舵機構104は、駆動輪103(前輪)の角度を変更して車両の進行方向を制御する機構である。操舵機構104は、周知の構成を例示でき、例えばステアリングシャフトの回転をステアリングボックスにより直線方向に変換してタイロッドに伝達し、タイロッドにより左右の駆動輪103(前輪)の角度を変更する。
制動機構105は、車両の走行を制動させる機構である。制動機構105としては特に限定されず、ドラムブレーキ、ディスクブレーキ、エンジンブレーキ等の各種装置を利用できる。
【0010】
駆動制御装置106は、ユーザのアクセル操作やコントローラ40からの駆動指令に基づいて、駆動源101の出力及び駆動伝達機構102でのギア比を制御し、車両を走行させる。
操舵制御装置107は、ユーザのステアリング操作やコントローラ40からの操舵指令に基づいて、操舵機構104を制御し、車両を所望の進行方向に向かって走行させる。
制動制御装置108は、ユーザの制動操作やコントローラ40からの制動指令に基づいて、制動機構105を制御し、車両を制動させる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日産自動車株式会社
内燃機関
23日前
日産自動車株式会社
電子機器
10日前
日産自動車株式会社
吸気装置
4日前
日産自動車株式会社
電池モジュール
24日前
日産自動車株式会社
ロータシャフト
18日前
日産自動車株式会社
電池モジュール
2日前
日産自動車株式会社
ロータシャフト
18日前
日産自動車株式会社
リチウム二次電池
23日前
日産自動車株式会社
車両用排気部構造
23日前
日産自動車株式会社
全固体電池システム
2日前
日産自動車株式会社
エアレスタイヤ構造
10日前
日産自動車株式会社
ピックアップトラック
4日前
日産自動車株式会社
支援方法及び支援装置
4日前
日産自動車株式会社
パワー半導体モジュール
2日前
日産自動車株式会社
車両乗り合わせ方法及び装置
3日前
日産自動車株式会社
車両制御装置及び車両制御方法
3日前
日産自動車株式会社
情報処理装置及び情報処理方法
2日前
日産自動車株式会社
車両制御装置及び車両制御方法
3日前
日産自動車株式会社
情報提供方法及び情報提供装置
10日前
日産自動車株式会社
衝突回避方法、及び衝突回避装置
23日前
日産自動車株式会社
物体検出方法、及び物体検出装置
23日前
日産自動車株式会社
車両制御システム及び車両制御方法
3日前
日産自動車株式会社
内燃機関の制御方法および制御装置
2日前
日産自動車株式会社
内燃機関の制御方法および制御装置
2日前
日産自動車株式会社
楽曲情報共有方法及び楽曲情報共有装置
23日前
日産自動車株式会社
車両の発進制御方法、車両の発進制御装置
23日前
日産自動車株式会社
自動運転支援方法、及び自動運転支援装置
2日前
日産自動車株式会社
自動運転支援方法、及び自動運転支援装置
2日前
日産自動車株式会社
道路基準線生成方法及び道路基準線生成装置
2日前
日産自動車株式会社
内燃機関の制御方法及び内燃機関の制御装置
3日前
日産自動車株式会社
内燃機関の制御方法及び内燃機関の制御装置
23日前
日産自動車株式会社
駐車支援方法、駐車支援装置及びプログラム
3日前
日産自動車株式会社
ターボチャージャの潤滑油吸い出し抑制方法および装置
23日前
日産自動車株式会社
固体酸化物形燃料電池セル、固体酸化物形燃料電池セルの製造方法、及び固体酸化物形電解セル
23日前
日産自動車株式会社
ソフトウェア更新装置、ソフトウェア更新方法及びソフトウェア更新処理プログラム
4日前
個人
カーテント
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ