TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025167826
公報種別
公開特許公報(A)
公開日
2025-11-07
出願番号
2024072767
出願日
2024-04-26
発明の名称
物体検出方法、及び物体検出装置
出願人
日産自動車株式会社
代理人
弁理士法人樹之下知的財産事務所
主分類
G01S
17/89 20200101AFI20251030BHJP(測定;試験)
要約
【課題】処理負荷の軽減を図れるとともに、検出が必要な物体を適正に検出可能な物体検出方法、及び物体検出装置を提供する。
【解決手段】上下方向に複数のスキャンラインを有し、各スキャンラインが横方向の所定角度内に電磁波を射出して、物体の電磁波の反射点を検出するセンサを用いて、コントローラが物体を検出する物体検出方法であり、コントローラは、反射点を所定間隔で間引き、間引かれなかった反射点を取得する点群取得ステップと、取得された反射点に基づいて物体を検出する物体検出ステップと、を実施し、点群取得ステップにおいて、上方のスキャンラインに対して検出される反射点の間引き率と、下方のスキャンラインに対して検出される反射点の間引き率と、を異ならせる。
【選択図】図4
特許請求の範囲
【請求項1】
上下方向に所定間隔で設定される複数のスキャンラインを有し、各前記スキャンラインが横方向の所定角度内に電磁波を射出して、物体の前記電磁波の反射点を検出するセンサ、または、周囲を撮像して物体の特徴点を示す複数の画像特徴点が含まれた撮像画像を出力するステレオカメラを用いて、コンピュータが前記物体を検出する物体検出方法であって、
前記コンピュータは、
前記反射点または前記画像特徴点を所定間隔で間引き、間引かれなかった前記反射点または前記画像特徴点を取得する点群取得ステップと、
取得された前記反射点または前記画像特徴点に基づいて、前記物体を検出する物体検出ステップと、を実施し、
前記点群取得ステップにおいて、上方の前記スキャンラインに対して検出される前記反射点の間引き率、または前記撮像画像において地上高が高い位置の前記画像特徴点の間引き率と、下方の前記スキャンラインに対して検出される前記反射点の間引き率、または前記撮像画像において前記地上高が低い位置の前記画像特徴点の間引き率とを異ならせる、物体検出方法。
続きを表示(約 1,600 文字)
【請求項2】
前記点群取得ステップにおいて、下方の前記スキャンラインに対して検出される前記反射点の間引き率、または前記撮像画像において前記地上高が低い位置の前記画像特徴点の間引き率を、上方の前記スキャンラインに対して検出される前記反射点の間引き率、または前記撮像画像において前記地上高が高い位置の前記画像特徴点の間引き率よりも大きくする
請求項1に記載の物体検出方法。
【請求項3】
上下方向に設定された複数の前記スキャンラインを、複数の高さ範囲のグループに分割、または、前記撮像画像を前記地上高が異なる複数のグループに分類するグループ範囲設定ステップをさらに実施し、
前記点群取得ステップにおいて、各前記グループで前記反射点または前記画像特徴点の前記間引き率を異ならせる、
請求項1に記載の物体検出方法。
【請求項4】
前記グループ範囲設定ステップにおいて、前記反射点または前記画像特徴点の経時変化に基づいて可動物体を検出し、前記可動物体が検出される高さ範囲の前記スキャンラインまたは前記可動物体が検出される前記地上高が属する可動体グループ、前記可動体グループより上方の高さ範囲の前記スキャンラインまたは前記可動体グループより高い前記地上高が属する上方グループ、及び前記可動体グループより下方の高さ範囲の前記スキャンラインまたは前記可動体グループより低い前記地上高が属する下方グループ、を設定する、
請求項3に記載の物体検出方法。
【請求項5】
前記点群取得ステップにおいて、前記上方グループの間引き率を最も小さくし、前記下方グループの間引き率を最も大きくし、前記可動体グループの間引き率を、前記上方グループと前記下方グループとの中間の間引き率とする、
請求項4に記載の物体検出方法。
【請求項6】
前記グループ範囲設定ステップにおいて、前記可動物体が検出されない場合、路面を平行な方向に前記電磁波を射出する前記スキャンラインを水平スキャンラインとして、前記水平スキャンラインの上方の高さ範囲の前記スキャンライン、または、前記撮像画像において予め設定された所定の第一地上高より高い前記地上高が属する前記グループを前記上方グループとし、前記水平スキャンラインの下方の高さ範囲の前記スキャンライン、または、前記撮像画像において前記第一地上高より低い前記地上高が属する前記グループを前記下方グループとして設定する、
請求項4に記載の物体検出方法。
【請求項7】
前記物体検出ステップにおいて、前記反射点を検出した前記スキャンラインの上下方向の角度、及び前記反射点までの距離に基づいて、前記反射点の高さを算出する、
請求項1に記載の物体検出方法。
【請求項8】
前記物体検出ステップで前記反射点に基づく前記物体の検出が不可能である場合、前記点群取得ステップにおいて、前記反射点または前記画像特徴点の間引き率を小さくする、
請求項1に記載の物体検出方法。
【請求項9】
前記コンピュータが、
前記物体の地図上の位置及び形状に関する情報が記録された地図情報を取得する地図取得ステップと、
前記物体検出ステップで検出した前記物体と、前記地図情報に記録された前記物体とを照合して、前記地図上の位置を推定する位置推定ステップと、
をさらに実施する、請求項1に記載の物体検出方法。
【請求項10】
前記コンピュータが
現在位置を検出する現在位置検出ステップと、
前記物体検出ステップで検出した前記物体と、前記現在位置とを関連付けて地図を作製する地図作成ステップと、
をさらに実施する、請求項1に記載の物体検出方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、静止物体を検出する静止物体検出方法、及び静止物体検出装置に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、電磁波を送受信により物体を検出するLiDAR(Light Detection And Ranging)等のセンサを用いて障害物を検出する技術が知られている(特許文献1参照)。
特許文献1には、LiDARを用いてレーザーを周辺に照射し、障害物で反射されたレーザー(反射光)を受光して周辺環境を認識する障害物検出装置が開示されている。この装置では、X軸に延びる方向に隣り合う点Pの間隔が所定間隔以上となるようにダウンサンプリングを行うことで、処理負荷の軽減が図られている。
【先行技術文献】
【特許文献】
【0003】
特開2021-85828号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、センサを用いて物体を検出する場合に、検出した物体と、検出が不要な物体が含まれる場合がある。例えば、地図上での車両の位置を検出するために、GNSS(Global Navigation Satellite System)等の衛星信号を用いて車両の経緯度を算出し、LiDAR等の周囲検出センサにより検出される周辺の物体と、算出した経緯度とをマッチング処理することで、車用の現在位置を特定する技術がある。このようなマッチング処理では、周辺の建築物等の移動しない物体を適正に検出する必要がある。一方、周辺の車両や車道等は、上記のようなマッチング処理に寄与しないため、不要なデータとなる。その他、地図を作製する場合において、建築物を検出して、車両や歩行者等の物体は検出したくない場合等もありうる。
上記特許文献1の技術では、レーザーを照射した範囲に対して一様にダウンサンプリングを行うため、建築物等の検出した対象物に対してもサンプリング間隔が粗くなるとの課題がある。
【0005】
本発明は、処理負荷の軽減を図れるとともに、検出が必要な物体を適正に検出可能な物体検出方法、及び物体検出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の第一態様の物体検出方法では、上下方向に所定間隔で設定される複数のスキャンラインを有し各スキャンラインが横方向に所定角度間隔で電磁波を射出して物体での反射点を検出するセンサ、または、周囲を撮像して物体の特徴点を示す複数の画像特徴点が含まれた撮像画像を出力するステレオカメラを用いて物体を検出する。当該物体検出方法は、センサまたはステレオカメラにより反射点または画像特徴点を間引き、間引かれなかった反射点または画像特徴点を取得し、取得した反射点または画像特徴点に基づいて物体を検出する。この際、上方のスキャンラインの反射点、または撮像画像で地上高が高い位置の画像特徴点と、下方のスキャンラインの反射点、または撮像画像で地上高が低い位置の画像特徴点とで間引き率を異ならせる。
【0007】
本態様では、上方と下方とで反射点または画像特徴点の間引き率を変化させる。これにより、検出したい物体が存在する位置の反射点または画像特徴点の間引き率を小さくして、検出が不要な物体の位置の反射点または画像特徴点の間引き率を大きくすることで、処理負荷の軽減を図れるとともに、検出が必要な物体を適正に検出することができる。
【図面の簡単な説明】
【0008】
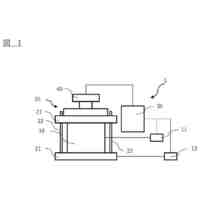
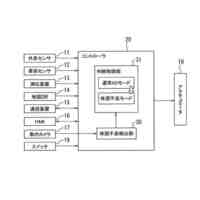
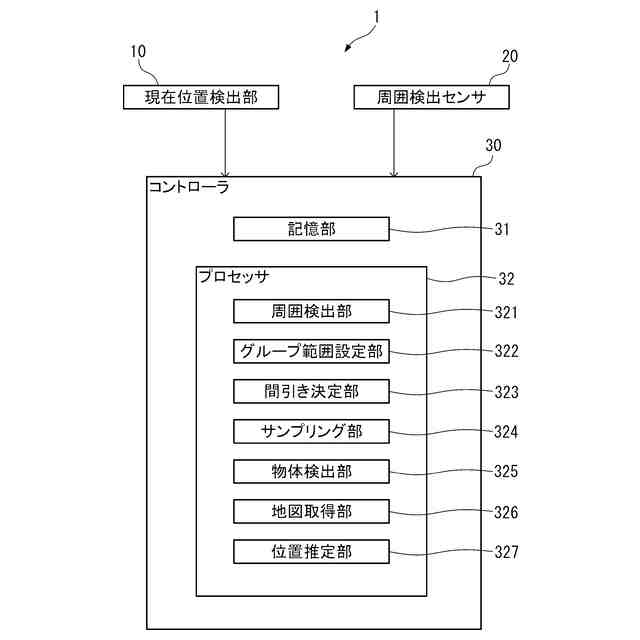
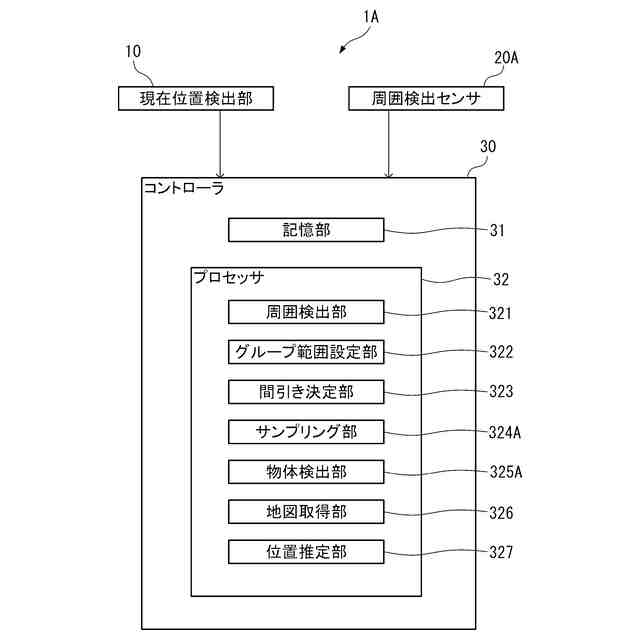
第一実施形態の位置特定装置の概略構成を示すブロック図。
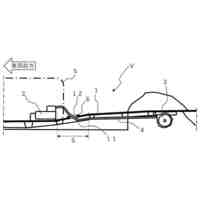
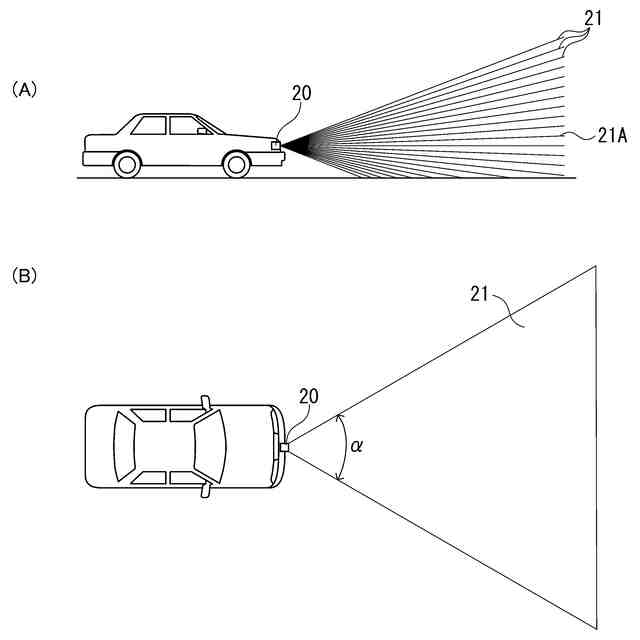
第一実施形態において、周囲検出センサの電磁波の射出方向の一例を示す模式図であり、(A)は、路面に平行な方向から見た場合の電磁波の射出方向を示す図、(B)は、路面の法線方向から見た場合の1つのスキャンラインの電磁波の射出方向を示す図。
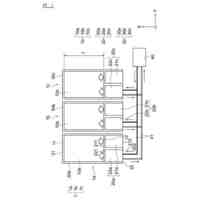
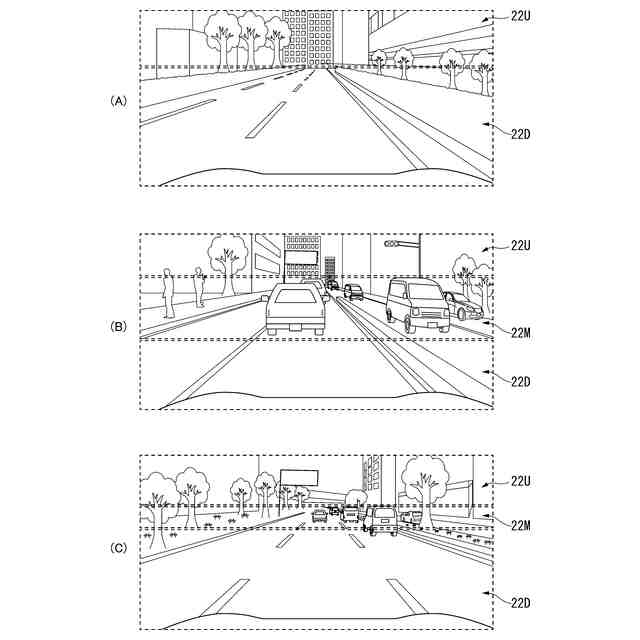
第一実施形態におけるグループ設定の一例を示す図であり、(A)は、可動体が検出されない場合のグループ設定の一例を示す図、(B)及び(C)は、可動体が検出された場合のグループ設定の一例を示す図。
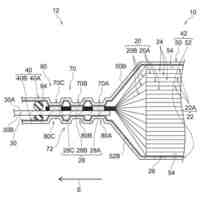
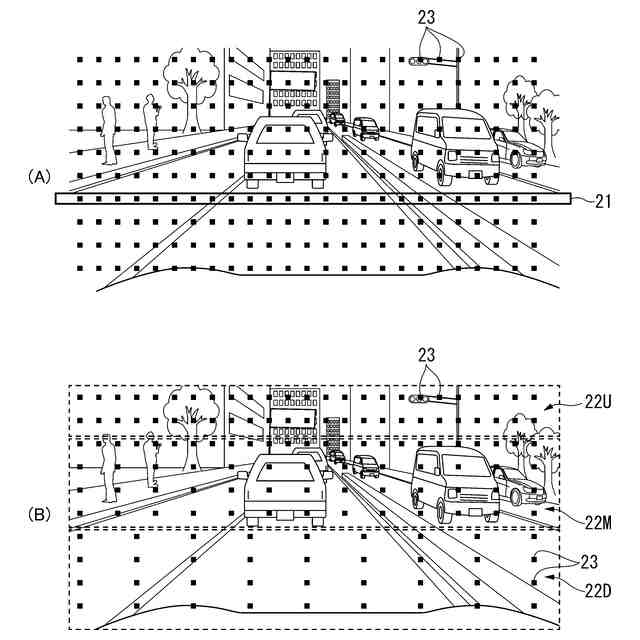
第一実施形態において、サンプリング部によりサンプリングされる反射点の一例を示す図であり、(A)は、サンプリング可能な反射点23の一例を示す図、(B)は、サンプリングされる反射点の一例を示す図。
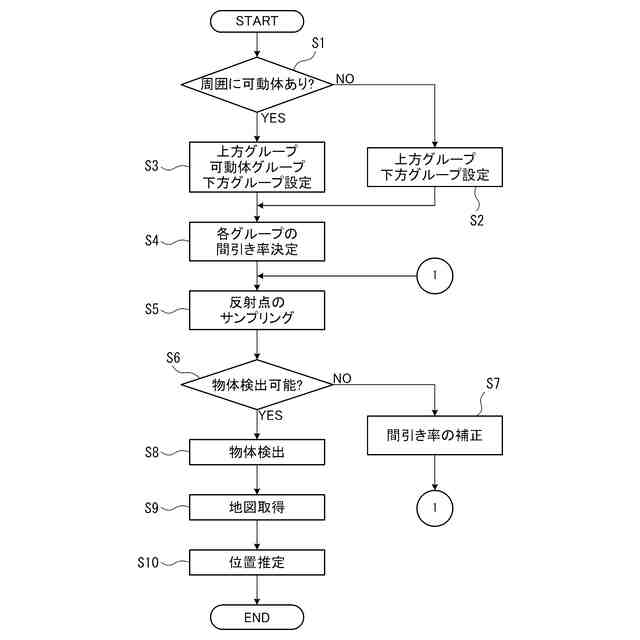
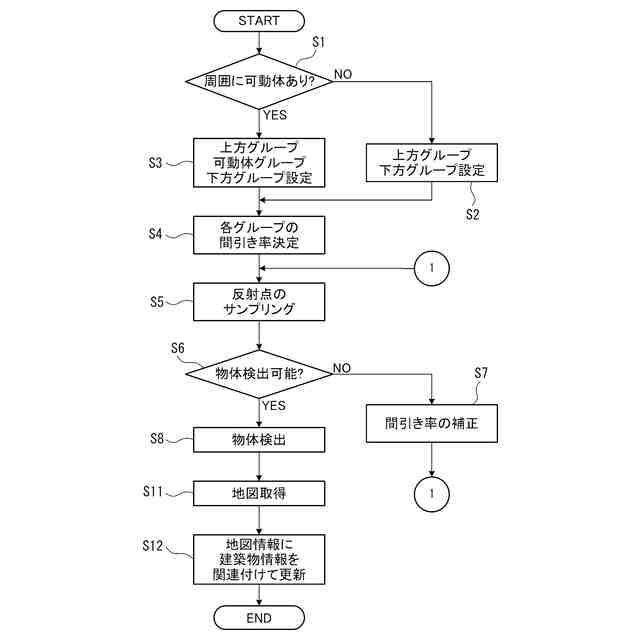
第一実施形態の物体検出方法及び位置推定方法を示すフローチャート。
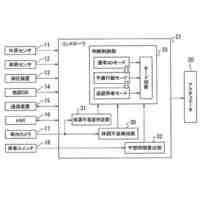
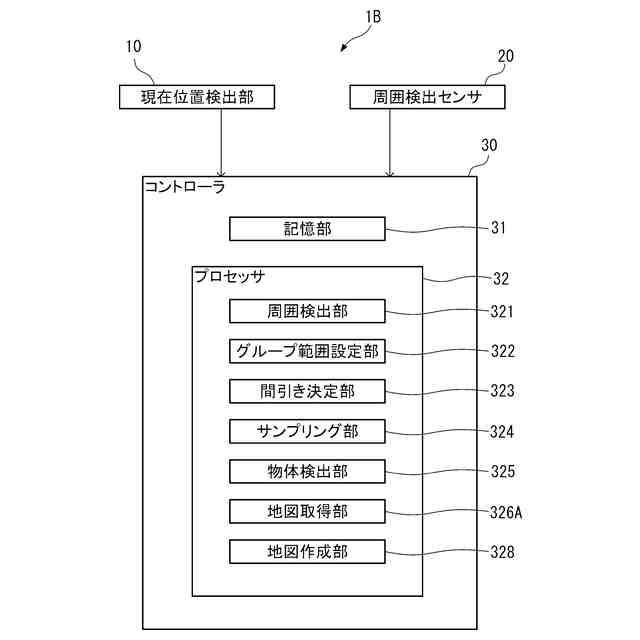
第二実施形態の位置特定装置の概略構成を示すブロック図。
第三実施形態の地図作成装置の概略構成を示すブロック図。
第三実施形態の物体検出方法及び地図作成方法を示すフローチャート。
【発明を実施するための形態】
【0009】
[第一実施形態]
以下、第一実施形態の物体検出装置としても機能する位置特定装置について説明する。
図1は、本実施形態の位置特定装置の概略構成を示すブロック図である。本実施形態の位置特定装置1は、本開示の物体検出装置として機能し、検出した周囲物体と、地図情報に記録された地図上の物体(例えば建築物)とをマッチングすることで、車両の現在位置を特定する装置である。
位置特定装置1は、現在位置検出部10と、周囲検出センサ20と、コントローラ30とを備える。なお、車両には、位置特定装置1を構成する上記の現在位置検出部10、周囲検出センサ20、及びコントローラ30の他に、その他の機能を実現する各種構成が設けられている。例えば、車両には、車両の駆動輪を駆動、操舵、及び制動させるための走行機構、空調機構、ナビゲーション装置等が設けられる。これらの構成の一部が位置特定装置1と共有されていてもよい。例えば、本実施形態では、周囲検出センサ20により検出される周囲物体に基づいて、現在の車両位置を特定する例を示すが、周囲検出センサ20により検出される物体を用いて、周囲の交通状況に応じた自動運転を実施してもよい。
【0010】
現在位置検出部10は、自車の現在位置を検出するセンサである。現在位置検出部10としては、例えば、GNSS(Global Navigation Satellite System)の衛星信号を受信して現在の経緯度を測位する受信機等が例示できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日産自動車株式会社
内燃機関
1か月前
日産自動車株式会社
保持機構
1か月前
日産自動車株式会社
電子機器
9日前
日産自動車株式会社
吸気装置
3日前
日産自動車株式会社
電動車両
25日前
日産自動車株式会社
二次電池
1か月前
日産自動車株式会社
二次電池
1か月前
日産自動車株式会社
内燃機関
22日前
日産自動車株式会社
保持機構
1か月前
日産自動車株式会社
積層型電池
1か月前
日産自動車株式会社
面圧付与機構
1か月前
日産自動車株式会社
面圧付与機構
1か月前
日産自動車株式会社
ロータシャフト
17日前
日産自動車株式会社
電池モジュール
1か月前
日産自動車株式会社
電池モジュール
23日前
日産自動車株式会社
電池モジュール
1日前
日産自動車株式会社
ロータシャフト
17日前
日産自動車株式会社
リチウム二次電池
1か月前
日産自動車株式会社
車両用排気部構造
22日前
日産自動車株式会社
リチウム二次電池
22日前
日産自動車株式会社
全固体電池システム
1日前
日産自動車株式会社
塗装方法及び自動車
24日前
日産自動車株式会社
エアレスタイヤ構造
9日前
日産自動車株式会社
支援方法及び支援装置
3日前
日産自動車株式会社
ピックアップトラック
3日前
日産自動車株式会社
ギヤ装置のブリーザ構造
1か月前
日産自動車株式会社
エンジンのアンダカバー
1か月前
日産自動車株式会社
パワー半導体モジュール
1日前
株式会社ニフコ
締結構造
1か月前
日産自動車株式会社
相乗り可否判定方法及び装置
1か月前
日産自動車株式会社
車両用荷室における排熱構造
1か月前
日産自動車株式会社
車両乗り合わせ方法及び装置
2日前
日産自動車株式会社
車載機能制御方法及び車載端末
1か月前
日産自動車株式会社
車両制御装置及び車両制御方法
2日前
日産自動車株式会社
運転支援方法及び運転支援装置
1か月前
日産自動車株式会社
車両制御装置及び車両制御方法
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ