TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025167000
公報種別
公開特許公報(A)
公開日
2025-11-07
出願番号
2024071244
出願日
2024-04-25
発明の名称
投射位置の判定方法および投射位置の判定装置
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
G06Q
50/04 20120101AFI20251030BHJP(計算;計数)
要約
【課題】作業対象物に投射される位置画像の位置ずれ検出する。
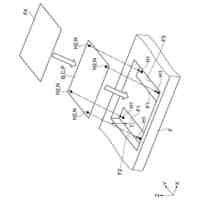
【解決手段】作業対象物6に対する位置画像に対応付けられた基準点像を、作業対象物6の位置を画定するための物理マーカーMk0~Mk4に対応して投射装置12から投射することと、物理マーカーMk0~Mk4と基準点像とを撮影装置14で撮影することにより、少なくとも1つの撮影画像を取得することと、当該撮影画像に基づいて物理マーカーMk0~Mk4で示される座標と基準点像座標とが予め定められた関係を充足するか否かをコンピューター10により判定することと、関係を充足しなければ、作業対象物6に対して位置画像の位置がずれたとコンピューター10により検出する。
【選択図】図2
特許請求の範囲
【請求項1】
作業が施される作業対象物に対して、当該作業対象物に対する位置画像に対応付けられた基準点像を、前記作業対象物の位置を画定するための基体が有する基準点に対応して投射装置から投射することと、
前記基準点と前記基準点像とを撮影装置で撮影することにより、少なくとも1つの撮影画像を取得することと、
前記少なくとも1つの撮影画像に基づいて、前記基準点の位置と前記基準点像の位置とが、一致するか否かをコンピューターにより判定することと、
前記基準点の位置と前記基準点像の位置とが一致しなければ、前記作業対象物に対して前記位置画像の位置がずれたと前記コンピューターにより検出することと、
を含む投射位置の判定方法。
続きを表示(約 1,800 文字)
【請求項2】
現実空間において作業が施される作業対象物と、前記現実空間において基準点を有し、かつ、前記作業対象物の位置を画定するための基体と、前記現実空間において前記作業対象物に対する位置画像を前記作業対象物に投射する投射装置と、の配置を、コンピューターの仮想空間に再現することと、
前記仮想空間において前記投射装置から前記作業対象物に投射される前記位置画像を、前記現実空間において前記投射装置から前記作業対象物に投射することと、
前記仮想空間において前記位置画像に対応付けられた基準点像を前記基準点の位置に配置することと、
前記現実空間において前記位置画像に対応付けられた基準点像を、前記基準点に対応するように前記投射装置から投射することと、
前記現実空間において前記基準点と前記基準点像とを撮影装置で撮影することにより、少なくとも1つの撮影画像を取得することと、
前記少なくとも1つの撮影画像に基づいて、前記基準点の位置と前記基準点像の位置との第1位置関係を前記コンピューターにより特定することと、
前記第1位置関係と、前記仮想空間における前記基準点の位置と前記基準点像の位置との第2位置関係とが、一致するか否かをコンピューターにより判定することと、
前記第1位置関係と前記第2位置関係とが一致しなければ、前記位置画像のずれが生じたと前記コンピューターにより検出することと、
を含む投射位置の判定方法。
【請求項3】
前記少なくとも1つの撮影画像を取得することは、
前記基準点を、カメラで撮像することにより、第1の撮影画像を取得することと、
前記基準点と前記基準点像とを前記カメラで撮像することにより、第2の撮影画像を取得することと、
を含み、
前記一致するか否かを前記コンピューターにより判定することは、
前記第1の撮影画像と前記第2の撮影画像とを含むデータセットを解析した結果に基づき行われる、
請求項1または2に記載の投射位置の判定方法。
【請求項4】
前記作業対象物に対する前記位置画像のずれが生じたと前記コンピューターにより検出した後に、
前記位置画像の表示態様を変化させることを含む、
請求項1または2に記載の投射位置の判定方法。
【請求項5】
前記基体は、前記作業対象物を支持し、
前記基体の動きまたは前記投射装置の動きの少なくとも一方を検出するセンサーからの信号に基づいて、前記基体が動いたか否かを前記コンピューターにより判定することと、
前記基体が動いたと前記コンピューターにより判定した場合に、前記少なくとも1つの撮影画像を取得することと、
を含む、請求項1または2に記載の投射位置の判定方法。
【請求項6】
現実空間において作業が施される作業対象物と、前記現実空間において基準点を有し、かつ、前記作業対象物の位置を画定するための基体と、前記現実空間において前記作業対象物に対する位置画像を前記作業対象物に投射する投射装置と、の配置を仮想空間に再現するコンピューターで実現される投射位置の判定装置であって、
前記コンピューターは、
前記仮想空間において前記投射装置から前記作業対象物に投射される前記位置画像を、前記現実空間において前記投射装置から前記作業対象物に投射することと、
前記仮想空間において前記位置画像に対応付けられた基準点像を前記基準点の位置に配置することと、
前記現実空間において前記位置画像に対応付けられた基準点像を、前記基準点に対応するように前記投射装置から投射することと、
前記現実空間において前記基準点と前記基準点像とを撮影装置で撮影することにより、少なくとも1つの撮影画像を取得することと、
前記少なくとも1つの撮影画像に基づいて、前記基準点の位置と前記基準点像の位置との第1位置関係を特定することと、
前記第1位置関係と、前記仮想空間における前記基準点の位置と前記基準点像の位置との第2位置関係とが、一致するか否かを判定することと、
前記第1位置関係と前記第2位置関係とが一致しなければ、前記位置画像のずれが生じたと検出することと、
を含む投射位置の判定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、投射位置の判定方法および投射位置の判定装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
例えば、生産ライン等において、作業者によって作業が施される作業対象物に画像を投射する技術、詳細には、作業対象物に、罫書きや、穴開けなどの作業位置、作業手順などを示す位置画像を投射して、作業者の作業を支援する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-000726号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記技術では、作業対象物に投射される位置画像が、何らかの理由によってずれてしまうと、以後、作業対象物が、誤った位置で作業が施されてしまう、という課題がある。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本開示の一態様に係る投射位置の判定方法は、作業が施される作業対象物に対して、当該作業対象物に対する位置画像に対応付けられた基準点像を、前記作業対象物の位置を画定するための基体が有する基準点に対応して投射装置から投射することと、前記基準点と前記基準点像とを撮影装置で撮影することにより、少なくとも1つの撮影画像を取得することと、前記少なくとも1つの撮影画像に基づいて、前記基準点の位置と前記基準点像の位置とが、一致するか否かをコンピューターにより判定することと、前記基準点の位置と前記基準点像の位置とが一致しなければ、前記作業対象物に対して前記位置画像の位置がずれたと前記コンピューターにより検出することと、を含む。
【0006】
本開示の別態様に係る投射位置の判定方法は、現実空間において作業が施される作業対象物と、前記現実空間において基準点を有し、かつ、前記作業対象物の位置を画定するための基体と、前記現実空間において前記作業対象物に対する位置画像を前記作業対象物に投射する投射装置と、の配置を、コンピューターの仮想空間に再現することと、前記仮想空間において前記投射装置から前記作業対象物に投射される前記位置画像を、前記現実空間において前記投射装置から前記作業対象物に投射することと、前記仮想空間において前記位置画像に対応付けられた基準点像を前記基準点の位置に配置することと、前記現実空間において前記位置画像に対応付けられた基準点像を、前記基準点に対応するように前記投射装置から投射することと、前記現実空間において前記基準点と前記基準点像とを撮影装置で撮影することにより、少なくとも1つの撮影画像を取得することと、前記少なくとも1つの撮影画像に基づいて、前記基準点の位置と前記基準点像の位置との第1位置関係を前記コンピューターにより特定することと、前記第1位置関係と、前記仮想空間における前記基準点の位置と前記基準点像の位置との第2位置関係とが、一致するか否かをコンピューターにより判定することと、前記第1位置関係と前記第2位置関係とが一致しなければ、前記位置画像のずれが生じたと前記コンピューターにより検出することと、を含む。
【0007】
本開示の態様に係る投射位置の判定装置は、現実空間において作業が施される作業対象物と、前記現実空間において基準点を有し、かつ、前記作業対象物の位置を画定するための基体と、前記現実空間において前記作業対象物に対する位置画像を前記作業対象物に投射する投射装置と、の配置を仮想空間に再現するコンピューターで実現される投射位置の判定装置であって、前記コンピューターは、前記仮想空間において前記投射装置から前記作業対象物に投射される前記位置画像を、前記現実空間において前記投射装置から前記作業対象物に投射することと、前記仮想空間において前記位置画像に対応付けられた基準点像を前記基準点の位置に配置することと、前記現実空間において前記位置画像に対応付けられた基準点像を、前記基準点に対応するように前記投射装置から投射することと、前記現実空間において前記基準点と前記基準点像とを撮影装置で撮影することにより、少なくとも1つの撮影画像を取得することと、前記少なくとも1つの撮影画像に基づいて、前記基準点の位置と前記基準点像の位置との第1位置関係を特定することと、前記第1位置関係と、前記仮想空間における前記基準点の位置と前記基準点像の位置との第2位置関係とが、一致するか否かを判定することと、前記第1位置関係と前記第2位置関係とが一致しなければ、前記位置画像のずれが生じたと検出することと、を含む。
【図面の簡単な説明】
【0008】
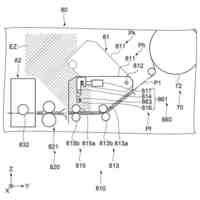
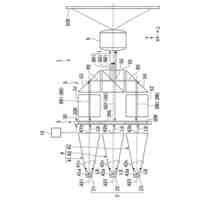
実施形態に係る投射位置の判定方法が適用されるシステムの概要を示す図である。
作業対象物に位置画像が投射された例を示す図である。
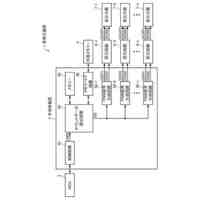
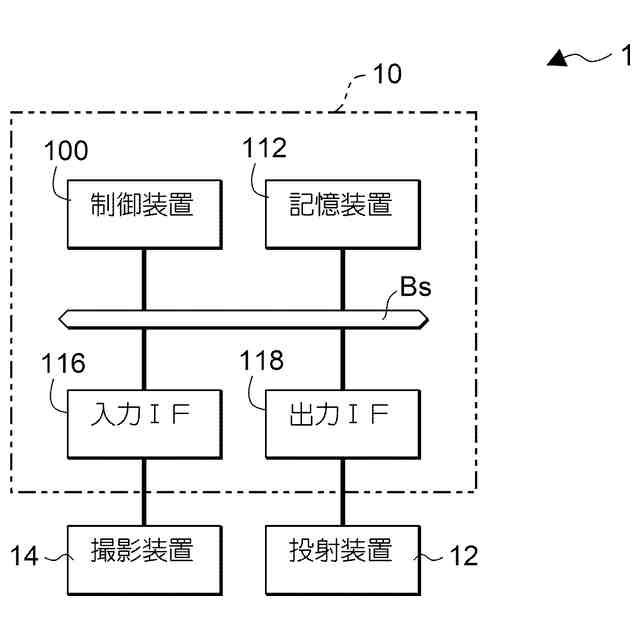
システムの構成を示す図である。
システムにおけるコンピューターの制御装置で構築される機能ブロック図である。
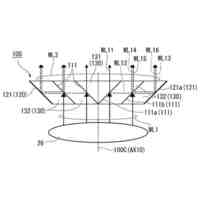
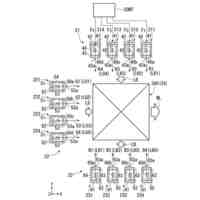
物理マーカーの例を示す図である。
物理マーカーで求められる座標等の説明図である。
物理マーカーに投射される基準点像等の説明図である。
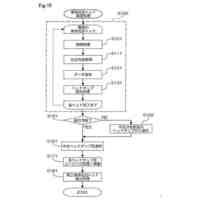
位置画像および基準点像の投射動作を示すフローチャートである。
投射位置の判定動作を示すフローチャートである。
位置画像の生成を示す説明図である。
物理マーカーに設定される解析範囲の例を示す図である。
位置ずれがないと判定される場合の例を示す図である。
位置ずれがあると判定される場合の例を示す図である。
第1変形例を示す図である。
第2変形例を示す図である。
第4形変形を示す図である。
【発明を実施するための形態】
【0009】
以下、実施形態に係る投射位置の判定方法について図面を参照して説明する。なお、各図において、各部の寸法および縮尺は、実際のものと適宜に異ならせてある。また、以下に述べる実施の形態は、好適な具体例であるから、技術的に好ましい種々の限定が付されているが、本開示の範囲は、以下の説明において特に本開示を限定する旨の記載がない限り、これらの形態に限られるものではない。
【0010】
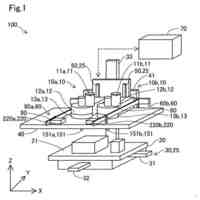
図1は、実施形態に係る投射位置の判定方法を実現するコンピューター10を含むシステム1の概要を示す図である。システム1は、上記コンピューター10、投射装置12および撮影装置14を含む。システム1は、投射装置12から作業対象物に位置画像を投射するとともに、当該位置画像が作業対象物に対してずれた状態で投射されたことを検出する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セイコーエプソン株式会社
記録装置
3日前
セイコーエプソン株式会社
電子時計
1日前
セイコーエプソン株式会社
記録装置
18日前
セイコーエプソン株式会社
印刷装置
22日前
セイコーエプソン株式会社
読み取り装置
18日前
セイコーエプソン株式会社
振動デバイス
3日前
セイコーエプソン株式会社
情報処理装置
15日前
セイコーエプソン株式会社
投射システム
24日前
セイコーエプソン株式会社
シート製造装置
3日前
セイコーエプソン株式会社
シート製造装置
3日前
セイコーエプソン株式会社
プロジェクター
1日前
セイコーエプソン株式会社
シート製造装置
23日前
セイコーエプソン株式会社
プロジェクター
9日前
セイコーエプソン株式会社
シート製造装置
18日前
セイコーエプソン株式会社
シート製造装置
15日前
セイコーエプソン株式会社
シート製造装置
18日前
セイコーエプソン株式会社
三次元造形装置
2日前
セイコーエプソン株式会社
シート製造装置
3日前
セイコーエプソン株式会社
トルク伝達機構
1日前
セイコーエプソン株式会社
プロジェクター
1日前
セイコーエプソン株式会社
プロジェクター
24日前
セイコーエプソン株式会社
プロジェクター
24日前
セイコーエプソン株式会社
センサーモジュール
25日前
セイコーエプソン株式会社
表示装置の制御方法
1日前
セイコーエプソン株式会社
三次元造形物の製造方法
1日前
セイコーエプソン株式会社
半導体装置及び電子機器
22日前
セイコーエプソン株式会社
慣性センサーモジュール
3日前
セイコーエプソン株式会社
プロジェクターの制御方法
24日前
セイコーエプソン株式会社
液体吐出ヘッドの製造方法
10日前
セイコーエプソン株式会社
媒体搬送装置及び記録装置
1日前
セイコーエプソン株式会社
乾燥装置及び印刷システム
1日前
セイコーエプソン株式会社
物理量センサーの製造方法
23日前
セイコーエプソン株式会社
可動式コンプレッサーボックス
18日前
セイコーエプソン株式会社
振動素子、振動子、及び発振器
10日前
セイコーエプソン株式会社
液体噴射ヘッド及び液体噴射装置
1日前
セイコーエプソン株式会社
液体噴射ヘッド及び液体噴射装置
1日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ