TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025165715
公報種別
公開特許公報(A)
公開日
2025-11-05
出願番号
2024069973
出願日
2024-04-23
発明の名称
三相ブラシレスモータのドライバ回路および駆動方法
出願人
ローム株式会社
代理人
個人
,
個人
主分類
H02P
6/12 20060101AFI20251028BHJP(電力の発電,変換,配電)
要約
【課題】異常を検出可能なモータドライバ回路を提供する。
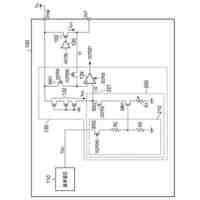
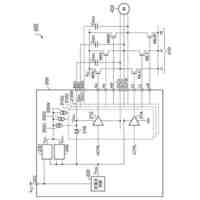
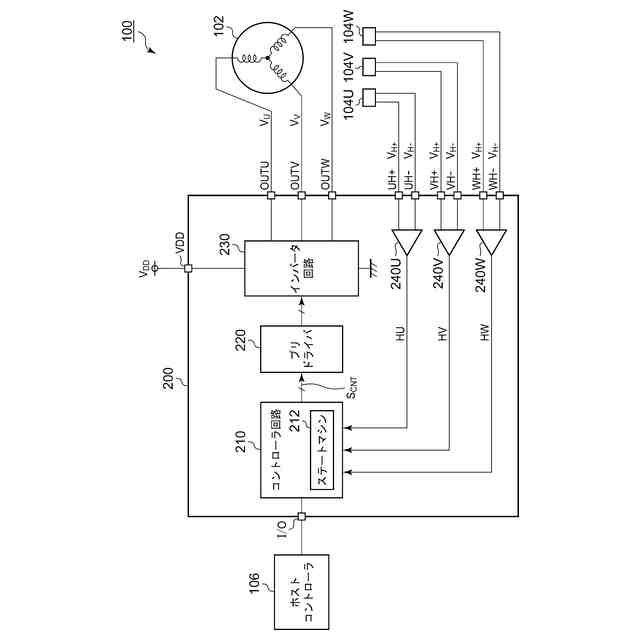
【解決手段】モータドライバ回路200は、センサ付き三相ブラシレスモータ102を駆動する。コントローラ回路210は、三相ブラシレスモータのロータの位置に応じてハイとローをとるU相ホール信号HU、V相ホール信号HV、W相ホール信号HWにもとづいて、インバータ回路230を制御する。コントローラ回路210は、三相ホール信号HU,HV,HWの組み合わせを監視し、すべてがハイ、またはすべてがローである状態に遷移すると、カウント値を第1量、変化させ、それ以外の状態に遷移すると、カウント値を、第2量、逆方向に変化させ、カウント値がしきい値に達すると異常と判定する。
【選択図】図1
特許請求の範囲
【請求項1】
センサ付き三相ブラシレスモータを駆動するモータドライバ回路であって、
前記三相ブラシレスモータのロータの位置に応じてハイとローをとるU相ホール信号、V相ホール信号、W相ホール信号にもとづいて、前記三相ブラシレスモータと接続されるインバータ回路を制御するコントローラ回路を備え、
前記コントローラ回路は、
前記U相ホール信号、前記V相ホール信号、前記W相ホール信号の組み合わせを監視し、すべてがハイ、またはすべてがローである状態に遷移すると、カウント値を第1量、変化させ、それ以外の状態に遷移すると、前記カウント値を、第2量、逆方向に変化させ、前記カウント値がしきい値に達すると異常と判定する、モータドライバ回路。
続きを表示(約 600 文字)
【請求項2】
前記コントローラ回路は、前記組み合わせの2つの連続する遷移にもとづいて、前記三相ブラシレスモータの回転方向を判定する、請求項1に記載のモータドライバ回路。
【請求項3】
前記コントローラ回路が前記異常と判定すると、外部のホストコントローラに通知する、請求項1または2に記載のモータドライバ回路。
【請求項4】
ひとつの半導体基板に一体集積化される、請求項1または2のいずれかに記載のモータドライバ回路。
【請求項5】
センサ付き三相ブラシレスモータの駆動方法であって、
前記三相ブラシレスモータのロータの位置を示すU相ホール信号、V相ホール信号、W相ホール信号を生成するステップと、
前記U相ホール信号、V相ホール信号、W相ホール信号の組み合わせを監視し、すべてがハイ、またはすべてがローへの遷移が発生すると、カウント値を第1量、変化させ、それ以外の状態への遷移が発生すると、前記カウント値を、第2量、逆方向に変化させるステップと、
前記カウント値がしきい値に達すると異常と判定するステップと、
を備える、駆動方法。
【請求項6】
前記組み合わせの2つの連続する遷移にもとづいて、前記三相ブラシレスモータの回転方向を判定するステップをさらに備える、請求項5に記載の駆動方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、三相ブラシレスモータの駆動技術に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
三相ブラシレスモータを駆動する際、ロータの位置に応じて駆動相を切替える必要がある。三相ブラシレスモータの駆動方式は、ロータの位置検出の方式によって、センサレス方式と、ホールセンサ駆動に分類される。ホールセンサ駆動では、ホール素子やホールICなどのホールセンサの出力(ホール信号という)を利用して、ロータの位置を検出する。
【0003】
モータが正常に回転しているとき、三相のホール信号は、回転方向に応じたシーケンスで、回転数に応じた周期で規則的に変化する。
【先行技術文献】
【特許文献】
【0004】
特許第6664981号公報
【0005】
[概要]
本開示は係る状況においてなされたものであり、そのある態様の目的のひとつは、異常を検出可能なモータドライバ回路および駆動方法の提供にある。
【0006】
本開示のある態様は、センサ付き三相ブラシレスモータを駆動するモータドライバ回路に関する。モータドライバ回路は、三相ブラシレスモータのロータの位置に応じてハイとローをとるU相ホール信号、V相ホール信号、W相ホール信号にもとづいて、三相ブラシレスモータと接続されるインバータ回路を制御するコントローラ回路を備える。コントローラ回路は、U相ホール信号、V相ホール信号、W相ホール信号の組み合わせを監視し、すべてがハイ、またはすべてがローである状態に遷移すると、カウント値を第1量、変化させ、それ以外の状態に遷移すると、カウント値を、第2量、逆方向に変化させ、カウント値がしきい値に達すると異常と判定する。
【0007】
本開示の別の態様は、センサ付き三相ブラシレスモータの駆動方法に関する。駆動方法は、三相ブラシレスモータのロータの位置を示すU相ホール信号、V相ホール信号、W相ホール信号を生成するステップと、U相ホール信号、V相ホール信号、W相ホール信号の組み合わせを監視し、すべてがハイ、またはすべてがローへの遷移が発生すると、カウント値を第1量、変化させ、それ以外の状態への遷移が発生すると、カウント値を、第2量、逆方向に変化させるステップと、カウント値がしきい値に達すると異常と判定するステップと、を備える。
【0008】
なお、以上の構成要素を任意に組み合わせたもの、本開示の構成要素や表現を、方法、装置、システムなどの間で相互に置換したものもまた、本開示の態様として有効である。
【図面の簡単な説明】
【0009】
図1は、実施形態に係るモータ回路の回路図である。
図2は、モータが回転しているときの三相ホール信号HU,HV,HWの遷移を示す図である。
図3は、コントローラ回路による異常判定の一例を説明する図である。
図4は、コントローラ回路による異常判定の一例を説明する図である。
図5は、コントローラ回路の異常判定機能の構成例を示すブロック図である。
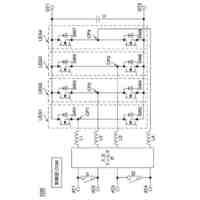
図6は、変形例に係るモータ回路の回路図である。
【0010】
[詳細な説明]
(実施形態の概要)
本開示のいくつかの例示的な実施形態の概要を説明する。この概要は、後述する詳細な説明の前置きとして、実施形態の基本的な理解を目的として、1つまたは複数の実施形態のいくつかの概念を簡略化して説明するものであり、発明あるいは開示の広さを限定するものではない。またこの概要は、考えられるすべての実施形態の包括的な概要ではなく、実施形態の欠くべからざる構成要素を限定するものではない。便宜上、「一実施形態」は、本明細書に開示するひとつの実施形態(実施例や変形例)または複数の実施形態(実施例や変形例)を指すものとして用いる場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
電気を重力で発電装置
1か月前
個人
高圧電気機器の開閉器
19日前
キヤノン電子株式会社
モータ
1か月前
キヤノン電子株式会社
モータ
1か月前
トヨタ自動車株式会社
モータ
1か月前
株式会社アイドゥス企画
減反モータ
19日前
株式会社デンソー
端子台
12日前
株式会社デンソー
回転電機
3日前
株式会社ダイヘン
送配電装置
3日前
本田技研工業株式会社
回転電機
5日前
富士電機株式会社
電力変換装置
3日前
富士電機株式会社
電力変換装置
3日前
ローム株式会社
半導体集積回路
10日前
株式会社不二越
空冷式油圧装置
3日前
株式会社TMEIC
制御装置
11日前
株式会社日立製作所
回転電機
10日前
矢崎総業株式会社
給電装置
11日前
矢崎総業株式会社
電源回路
18日前
大和ハウス工業株式会社
敷設用機器
11日前
個人
非対称鏡像力を有する4層PWB電荷搬送体
26日前
ローム株式会社
モータドライバ回路
26日前
トヨタ自動車株式会社
ステータの製造装置
1か月前
株式会社イノコンバンク
無線給電システム
3日前
日産自動車株式会社
ロータシャフト
26日前
日産自動車株式会社
ロータシャフト
26日前
トヨタ自動車株式会社
可変界磁ロータ
1か月前
株式会社TMEIC
電力変換装置
11日前
株式会社マキタ
電動作業機
1か月前
株式会社土井製作所
ケーブル保護管路
10日前
サンデン株式会社
モータ
4日前
個人
電線盗難防止方法及び電線盗難防止装置
1か月前
サンデン株式会社
モータ
4日前
京商株式会社
模型用非接触電力供給システム
19日前
株式会社アイシン
電力変換装置
1か月前
ローム株式会社
半導体装置
10日前
ローム株式会社
半導体装置
10日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ