TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025164067
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024067807
出願日
2024-04-18
発明の名称
車両用制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B60W
30/02 20120101AFI20251023BHJP(車両一般)
要約
【課題】駆動輪のスリップの発生を適切に低減することができる車両用制御装置を提供する。
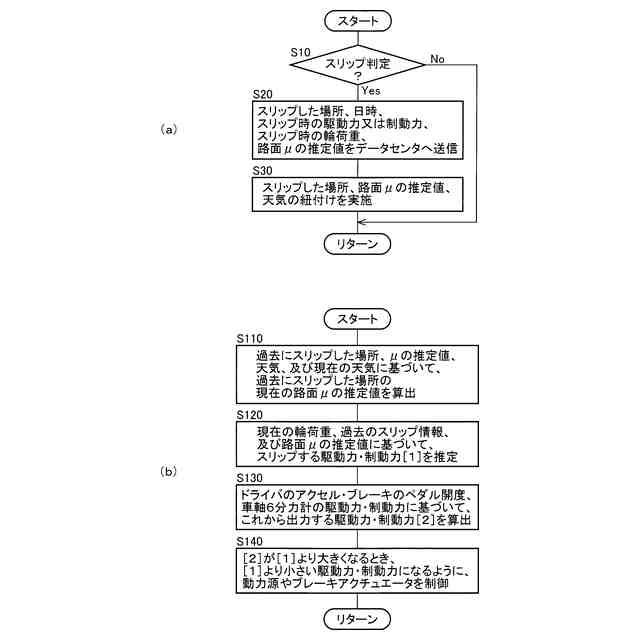
【解決手段】スリップが発生したときの、場所、路面摩擦係数の推定値、及び天気情報と、スリップが発生した場所における現在の天気情報と、に基づいてスリップが発生した場所における現在の路面摩擦係数の推定値が算出される。加えて、現在の路面摩擦係数の推定値と現在の輪荷重とに基づいて、スリップが発生した場所におけるスリップが発生する、駆動輪における下限の力の推定値が算出される。これにより、スリップが発生する可能性が高い駆動輪における力が精度良く推定される。更に、スリップが発生した場所において、下限の力の推定値よりも小さくなるように、運転者の操作に応じて出力する駆動輪における力が制御される。これにより、スリップの発生を低減する運転支援制御が適切に行われる。
【選択図】図3
特許請求の範囲
【請求項1】
駆動輪のスリップの発生を低減する運転支援制御を行う車両用制御装置であって、
前記駆動輪の各々における輪荷重と、前記駆動輪の各々における車輪速と、車両の位置情報と、前記スリップが発生した場所と、前記スリップが発生した場所の路面摩擦係数の推定値と、走行している地域の天気情報と、を取得する取得部と、
前記スリップが発生したときの、前記場所、前記路面摩擦係数の推定値、及び前記天気情報と、前記スリップが発生した場所における現在の前記天気情報と、に基づいて前記スリップが発生した場所における現在の路面摩擦係数の推定値を算出し、前記現在の路面摩擦係数の推定値と現在の前記輪荷重とに基づいて、前記スリップが発生した場所における前記スリップが発生する、前記駆動輪における下限の力の推定値を算出する演算部と、
前記スリップが発生した場所において、前記下限の力の推定値よりも小さくなるように、運転者の操作に応じて出力する前記駆動輪における力を制御する出力制御部と、
を含むことを特徴とする車両用制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、駆動輪のスリップの発生を低減する車両用制御装置に関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
駆動輪のスリップの発生を低減する運転支援制御を行う車両用制御装置が良く知られている。例えば、特許文献1に記載された制御装置がそれである。この特許文献1には、車両重量と路面勾配とに基づいて発進に必要な必要駆動力を算出し、車両重量と路面摩擦係数とに基づいて限界駆動力を算出し、限界駆動力が必要駆動力を下回る場合に、発進補助装置を作動させることが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-151817号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、搭乗者の人数や位置や移動によっては駆動輪の何れかの荷重が小さくされてスリップが発生し易くされるおそれがある。特許文献1の技術では、駆動輪の各々における輪荷重が検出されない。その為、車両重量だけでは、輪荷重が小さくされた駆動輪のスリップの発生を予測することができず、駆動輪のスリップの発生を低減する運転支援制御を適切に行うことができないおそれがある。
【0005】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、駆動輪のスリップの発生を適切に低減することができる車両用制御装置を提供することにある。
【課題を解決するための手段】
【0006】
第1の発明の要旨とするところは、(a)駆動輪のスリップの発生を低減する運転支援制御を行う車両用制御装置であって、(b)前記駆動輪の各々における輪荷重と、前記駆動輪の各々における車輪速と、車両の位置情報と、前記スリップが発生した場所と、前記スリップが発生した場所の路面摩擦係数の推定値と、走行している地域の天気情報と、を取得する取得部と、(c)前記スリップが発生したときの、前記場所、前記路面摩擦係数の推定値、及び前記天気情報と、前記スリップが発生した場所における現在の前記天気情報と、に基づいて前記スリップが発生した場所における現在の路面摩擦係数の推定値を算出し、前記現在の路面摩擦係数の推定値と現在の前記輪荷重とに基づいて、前記スリップが発生した場所における前記スリップが発生する、前記駆動輪における下限の力の推定値を算出する演算部と、(d)前記スリップが発生した場所において、前記下限の力の推定値よりも小さくなるように、運転者の操作に応じて出力する前記駆動輪における力を制御する出力制御部と、を含むことにある。
【発明の効果】
【0007】
前記第1の発明によれば、スリップが発生したときの、場所、路面摩擦係数の推定値、及び天気情報と、スリップが発生した場所における現在の天気情報と、に基づいてスリップが発生した場所における現在の路面摩擦係数の推定値が算出される。加えて、現在の路面摩擦係数の推定値と現在の輪荷重とに基づいて、スリップが発生した場所におけるスリップが発生する、駆動輪における下限の力の推定値が算出される。これにより、スリップが発生する可能性が高い駆動輪における力が精度良く推定される。更に、スリップが発生した場所において、下限の力の推定値よりも小さくなるように、運転者の操作に応じて出力する駆動輪における力が制御される。これにより、スリップが発生する可能性が高い駆動輪における力を上限として駆動輪における力が制限されることで、スリップの発生を低減する運転支援制御が適切に行われる。よって、駆動輪のスリップの発生を適切に低減することができる。
【図面の簡単な説明】
【0008】
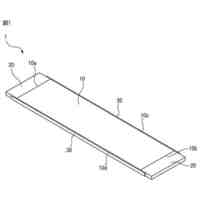
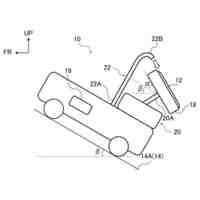
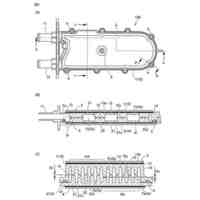
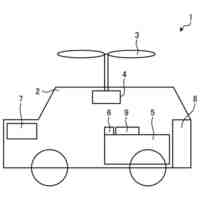
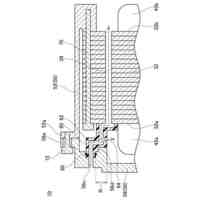
本発明が適用される車両の概略構成を説明する図である。
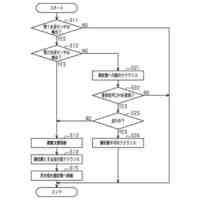
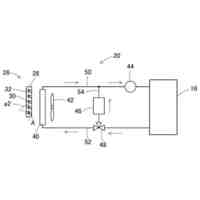
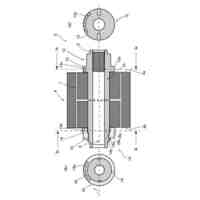
現在の輪荷重に基づいて、駆動力や制動力を制御する実施態様の一例を説明する図である。
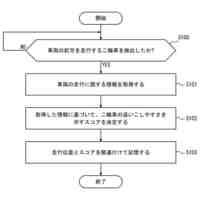
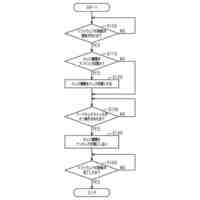
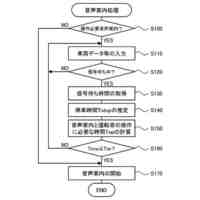
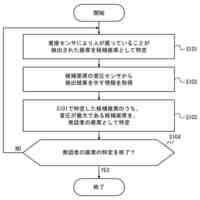
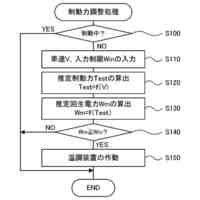
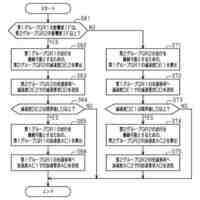
車両用制御装置(電子制御装置、データセンタ)の制御作動の要部を説明するフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施例を図面を参照して詳細に説明する。
【実施例】
【0010】
図1は、本発明が適用される車両10の概略構成を説明する図である。図1において、車両10は、例えば決められたルートを走行する、路線バスや自動運転車等であり、第1車両10a、第2車両10b、第3車両10c等を含んでいる。車両10は、動力源12と左右の前輪14と左右の後輪16とを備えている。尚、上記「左右」は、車両10の前進方向に対する左右である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
方法
22日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
方法
22日前
トヨタ自動車株式会社
椅子
22日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
21日前
トヨタ自動車株式会社
治具
7日前
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
車両
26日前
トヨタ自動車株式会社
車両
27日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
方法
14日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
19日前
トヨタ自動車株式会社
方法
12日前
トヨタ自動車株式会社
車体
15日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
電池
28日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
自動車
13日前
トヨタ自動車株式会社
電動車
22日前
トヨタ自動車株式会社
加熱器
26日前
トヨタ自動車株式会社
モータ
14日前
トヨタ自動車株式会社
飛行体
19日前
トヨタ自動車株式会社
電磁弁
22日前
トヨタ自動車株式会社
固定子
27日前
トヨタ自動車株式会社
正極層
12日前
トヨタ自動車株式会社
電動機
12日前
トヨタ自動車株式会社
モータ
20日前
トヨタ自動車株式会社
サーバ
9日前
トヨタ自動車株式会社
モータ
9日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ