TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025159840
公報種別
公開特許公報(A)
公開日
2025-10-22
出願番号
2024062643
出願日
2024-04-09
発明の名称
操作装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B62D
1/06 20060101AFI20251015BHJP(鉄道以外の路面車両)
要約
【課題】例えばオペレータが片手操作をする必要がある場合であっても、ステアリングホイールを操作する手で走行装置及び荷役装置の少なくとも一方を操作することができる操作装置を提供する。
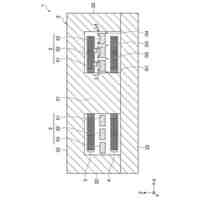
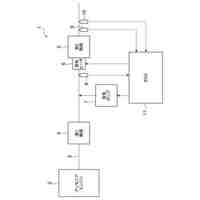
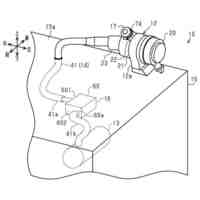
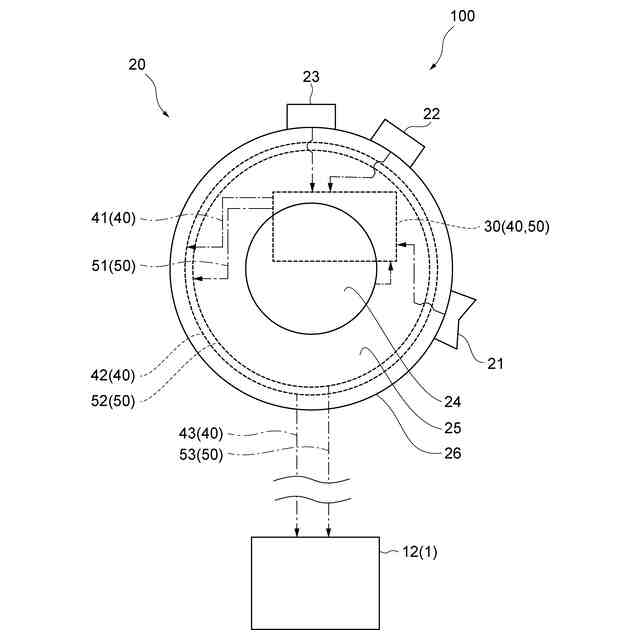
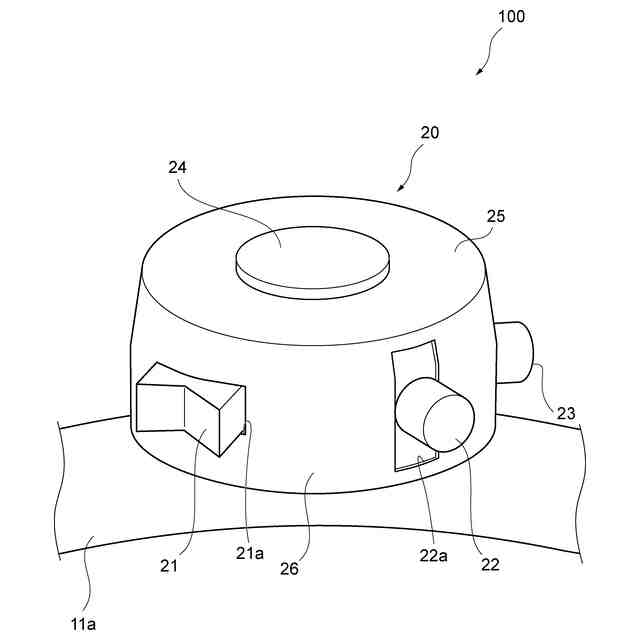
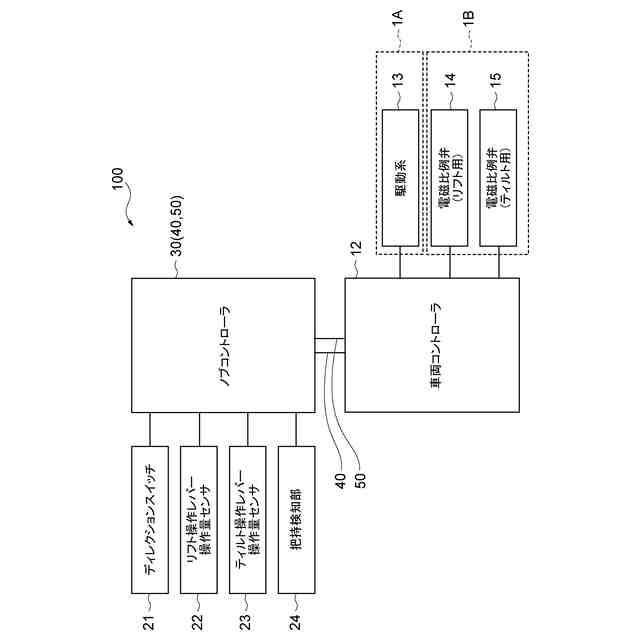
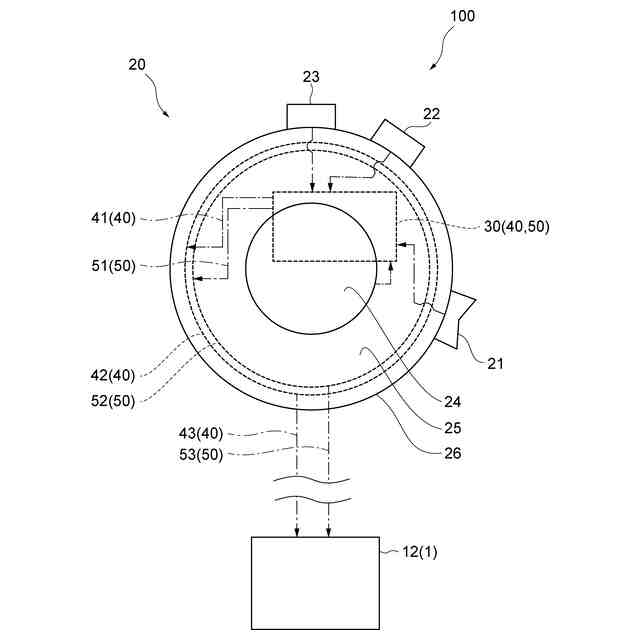
【解決手段】操作装置100は、荷役車両1を操作するための操作装置であって、荷役車両1のステアリングホイールに設けられたノブ20と、ノブ20に設けられ、走行装置及び荷役装置の少なくとも一方の操作の入力を受け付ける操作入力部21~23と、ステアリングホイールとノブ20との間に設けられ、操作入力部21~23からの操作信号を荷役車両1の車両コントローラ12に伝達する伝達部40,50と、を備える。伝達部40,50は、ノブ20に設けられた第1電極41,51と、ステアリングホイールに対して固定され、第1電極41,51と電気的に接続された第2電極42,52と、を有する。
【選択図】図5
特許請求の範囲
【請求項1】
荷役車両を操作するための操作装置であって、
前記荷役車両のステアリングホイールに設けられたノブと、
前記ノブに設けられ、走行装置及び荷役装置の少なくとも一方の操作の入力を受け付ける操作入力部と、
前記ステアリングホイールと前記ノブとの間に設けられ、前記操作入力部からの操作信号を前記荷役車両のコントローラに伝達する伝達部と、を備え、
前記伝達部は、前記ノブに設けられた第1電極と、前記ステアリングホイールに対して固定され、前記第1電極と電気的に接続された第2電極と、を有する、操作装置。
続きを表示(約 630 文字)
【請求項2】
前記ノブは、前記ステアリングホイールに対して相対的に回転可能であり、
前記第1電極は、前記第2電極と電気的に接続された状態で前記第2電極に対して前記ノブと共に相対的に回転可能である、請求項1に記載の操作装置。
【請求項3】
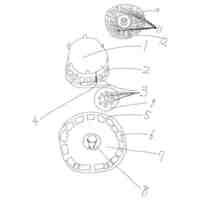
前記伝達部は、前記ステアリングホイールに固定されたリング部材と、前記ノブに固定された弾性部材と、を有し、
前記第2電極は、前記リング部材の周方向に沿って延在する環状電極であり、
前記第1電極は、前記弾性部材によって前記環状電極に押し当てられている、請求項2に記載の操作装置。
【請求項4】
前記伝達部は、前記操作入力部からの操作信号に基づいてCAN信号を生成するCAN信号生成部を有する、請求項1又は2に記載の操作装置。
【請求項5】
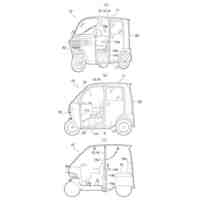
前記荷役車両は、フォークリフトであり、
前記走行装置の操作は、前進又は後退の進行方向を選択する操作であり、
前記荷役装置の操作は、リフト装置の操作及びティルト装置の操作である、請求項1又は2に記載の操作装置。
【請求項6】
前記ノブに設けられ、前記ノブが把持されたことを検知するための把持検知部を備え、
前記伝達部は、前記ノブが把持されたことを前記把持検知部が検知していない場合に、前記操作信号を前記コントローラに伝達しない、請求項1又は2に記載の操作装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、操作装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、リーチ式フォークリフトにおいて、操作レバーを越すような腕の動きやレバーの持替え等を省けるように、走行操作及び荷役操作を1本の操作レバーにより行うことができる技術が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2002-220196号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術では、走行操作及び荷役操作を行うための操作レバーが、ステアリングホイールとは別体である。ここで、例えばオペレータが片手操作をする必要がある場合、ステアリングホイールを操作する手で走行装置及び荷役装置の少なくとも一方を操作可能とするように改善する余地がある。
【課題を解決するための手段】
【0005】
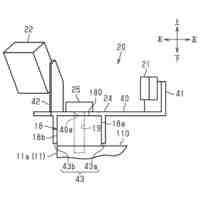
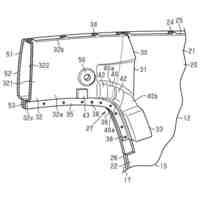
本発明の一態様は、荷役車両を操作するための操作装置であって、荷役車両のステアリングホイールに設けられ、ステアリングホイールに対して相対的に回転可能なノブと、ノブに設けられ、走行装置及び荷役装置の少なくとも一方の操作の入力を受け付ける操作入力部と、ステアリングホイールとノブとの間に設けられ、操作入力部からの操作信号を荷役車両のコントローラに伝達する伝達部と、を備え、伝達部は、ノブに設けられた第1電極と、ステアリングホイールに対して固定され、第1電極と電気的に接続された第2電極と、を有する。
【0006】
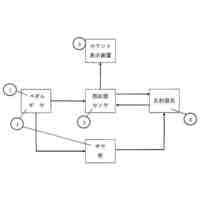
本発明の一態様に係る操作装置では、ステアリングホイールに設けられたノブの操作入力部は、走行装置及び荷役装置の少なくとも一方の操作の入力を受け付ける。操作入力部からの操作信号は、伝達部の第1電極及び第2電極を介して、荷役車両のコントローラに伝達される。この構成によれば、ステアリングホイールの操作と、操作入力部への操作の入力と、の両方は、オペレータがノブを把持した手で行うことができる。したがって、例えばオペレータが片手操作をする必要がある場合であっても、ステアリングホイールを操作する手で走行装置及び荷役装置の少なくとも一方を操作することができる。
【0007】
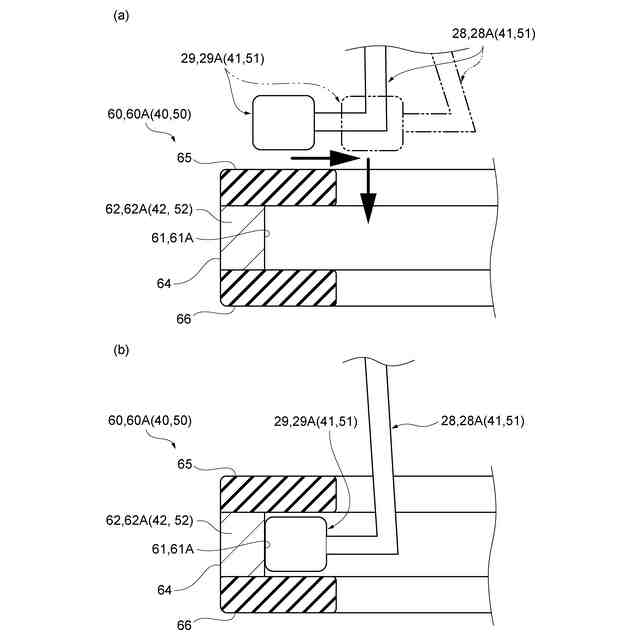
一実施形態において、ノブは、ステアリングホイールに対して相対的に回転可能であり、第1電極は、第2電極と電気的に接続された状態で第2電極に対してノブと共に相対的に回転可能であってもよい。この場合、オペレータがノブを把持してステアリングホイールを回転させる操作をしながら、オペレータが操作入力部で走行装置及び荷役装置の少なくとも一方を操作することが可能となる。
【0008】
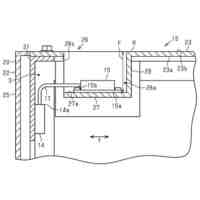
一実施形態において、伝達部は、ステアリングホイールに固定されたリング部材と、ノブに固定された弾性部材と、を有し、第2電極は、リング部材の周方向に沿って延在する環状電極であり、第1電極は、弾性部材によって環状電極に押し当てられていてもよい。この場合、弾性部材によって第1電極が環状電極に押し当てられることで、第1電極が、第2電極と電気的に接続された状態で第2電極に対してノブと共に相対的に回転可能とすることができる。
【0009】
一実施形態において、伝達部は、操作入力部からの操作信号に基づいてCAN信号を生成するCAN信号生成部を有してもよい。この場合、伝達部の第1電極及び第2電極を介して、CAN信号を操作入力部からの操作信号として荷役車両のコントローラに伝達することができる。
【0010】
一実施形態において、荷役車両は、フォークリフトであり、走行装置の操作は、前進又は後退の進行方向を選択する操作であり、荷役装置の操作は、リフト装置の操作及びティルト装置の操作であってもよい。この場合、例えばオペレータが片手だけでフォークリフトを操作する必要がある場合であっても、ステアリングホイールを操作する手で走行装置及び荷役装置の少なくとも一方を操作可能なフォークリフトを構成することができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社豊田自動織機
荷役装置
2日前
株式会社豊田自動織機
トランス
10日前
株式会社豊田自動織機
操作装置
10日前
株式会社豊田自動織機
排気浄化装置
11日前
株式会社豊田自動織機
双方向充電器
15日前
株式会社豊田自動織機
車両制御装置
8日前
株式会社豊田自動織機
ターボチャージャ
2日前
株式会社豊田自動織機
燃料電池ユニット
8日前
株式会社豊田自動織機
織機用異常検知装置
2日前
株式会社豊田自動織機
繊維機械の検査システム
2日前
株式会社豊田自動織機
車両のルーフサイド構造
11日前
株式会社豊田自動織機
繊維構造体、及び繊維強化複合材
2日前
株式会社豊田自動織機
内燃機関の吸気温度制御システム
2日前
株式会社豊田自動織機
燃料電池システム及びフォークリフト
17日前
トヨタ自動車株式会社
蓄電装置の製造方法
5日前
トヨタ自動車株式会社
バイポーラ型蓄電装置
8日前
トヨタ自動車株式会社
二次電池及び二次電池の制御方法
4日前
株式会社豊田自動織機
車両用の充電システム、充電回路、充電装置、および電圧の制御方法
11日前
個人
カート
3か月前
個人
走行装置
4か月前
個人
三輪バイク
9日前
個人
乗り物
5か月前
個人
電動走行車両
4か月前
個人
自転車用歩数計
17日前
個人
閂式ハンドル錠
4か月前
個人
駐輪設備
1か月前
個人
折り畳み自転車
11か月前
個人
発音装置
7か月前
個人
電動モビリティ
8か月前
個人
ボギー・フレーム
2か月前
個人
三輪電動車両
17日前
個人
ルーフ付きトライク
3か月前
個人
“zen-go.”
3か月前
個人
自由方向乗車自転車
8か月前
個人
体重掛けリフト台車
11か月前
個人
ルーフ付きトライク
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ