TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025159632
公報種別
公開特許公報(A)
公開日
2025-10-21
出願番号
2024062355
出願日
2024-04-08
発明の名称
撮像装置および撮像装置の制御方法、制御プログラム
出願人
パナソニックIPマネジメント株式会社
代理人
弁理士法人新樹グローバル・アイピー
主分類
H04N
23/611 20230101AFI20251014BHJP(電気通信技術)
要約
【課題】パン/チルト/ズーム方向において駆動される機構に加えてロール方向における回転機構を備えた撮像装置において、被写体の動きがあった場合でも被写体の実際の動きに応じて各機構を適切に制御することが可能な撮像装置を提供する。
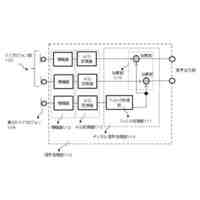
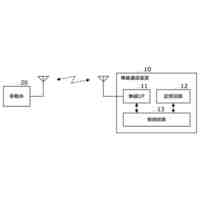
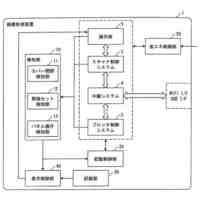
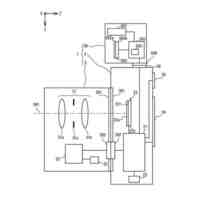
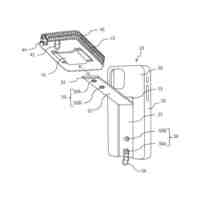
【解決手段】撮像装置10は、本体部11、撮像素子12、回転機構13、パン方向駆動機構14aおよびチルト方向駆動機構14b、レンズ駆動機構15、特徴点抽出部21、距離・画角情報取得部22、画素毎実距離算出部23、追跡対象移動距離・速度算出部24、駆動制御部25を備える。駆動制御部25は、追跡対象移動距離・速度算出部24において算出された被写体の実際の移動距離に応じて、回転機構13、パン方向駆動機構14aおよびチルト方向駆動機構14bおよびレンズ駆動機構15の少なくとも1つを制御する。
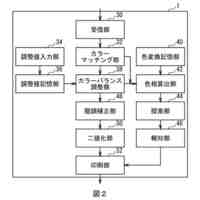
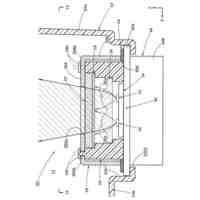
【選択図】図2
特許請求の範囲
【請求項1】
本体部と、
前記本体部に内包され光軸を有するレンズと、
前記レンズを通じて被写体側から入射してきた光を電気信号に変換して映像データを出力する撮像素子と、
前記被写体に対して略垂直な方向において前記本体部を回転させる際の回転中心となるロール軸を中心に前記本体部を回転させる回転機構と、
パン方向およびチルト方向における前記本体部の向きの調整を行う姿勢調整機構と、
前記レンズの位置を変化させて前記被写体の焦点位置を制御する焦点位置駆動機構と、
前記映像データに含まれる被写体の特徴点を、追跡対象として抽出する特徴点抽出部と、
映像の中の前記被写体の相対位置情報を取得する相対位置情報取得部と、
前記撮像素子の画素ごとの前記被写体までの距離に関する情報を取得する距離情報取得部と、
前記特徴点抽出部において抽出された前記特徴点の移動距離と、前記相対位置情報取得部において取得された前記映像の中の前記被写体の相対位置情報と、前記距離情報取得部において取得された前記被写体までの前記画素ごとの距離と、に応じて、前記追跡対象の実際の移動距離を算出する移動距離算出部と、
前記移動距離算出部において算出された前記実際の移動距離に応じて、前記回転機構、前記姿勢調整機構および前記焦点位置駆動機構の少なくとも1つを制御する制御部と、
を備えている撮像装置。
続きを表示(約 1,000 文字)
【請求項2】
前記相対位置情報取得部は、前記相対位置情報として、前記映像に含まれる前記被写体の背景の特徴点または直線成分を取得する、
請求項1に記載の撮像装置。
【請求項3】
前記回転機構、前記姿勢調整機構および前記焦点位置駆動機構は、それぞれ駆動部と、前記駆動部に取り付けられ移動量を出力するエンコーダと、を有しており、
前記相対位置情報取得部は、前記相対位置情報として、前記回転機構、前記姿勢調整機構および前記焦点位置駆動機構の前記エンコーダから前記移動量の情報を取得する、
請求項1または2に記載の撮像装置。
【請求項4】
前記本体部に設けられ、前記本体部の加速度を測定する加速度センサを、さらに備え、
前記相対位置情報取得部は、前記相対位置情報として、前記加速度センサから加速度の情報を取得する、
請求項1または2に記載の撮像装置。
【請求項5】
前記特徴点抽出部は、人物の顔、胴体、腕、指のいずれか1つから前記特徴点を抽出する、
請求項1または2に記載の撮像装置。
【請求項6】
前記特徴点抽出部は、被写体の背景から前記特徴点を抽出する、
請求項1または2に記載の撮像装置。
【請求項7】
前記特徴点抽出部は、ハフ変換によって直線エッジを検出して、前記特徴点を抽出する、
請求項1または2に記載の撮像装置。
【請求項8】
前記相対位置情報取得部は、前記被写体の相対位置情報として、前記被写体までの距離情報とともに、前記被写体を撮影する際に画角の情報を取得する、
請求項1または2に記載の撮像装置。
【請求項9】
前記制御部は、前記被写体の特定の動きを検出すると、前記移動距離算出部において算出された前記移動距離に応じて、前記回転機構、前記姿勢調整機構および前記焦点位置駆動機構の少なくとも1つの制御を開始する、
請求項1または2に記載の撮像装置。
【請求項10】
前記制御部は、前記被写体の特定の動きを検出すると、前記移動距離算出部において算出された前記移動距離に応じて、前記回転機構、前記姿勢調整機構および前記焦点位置駆動機構の少なくとも1つの制御を終了する、
請求項1または2に記載の撮像装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、例えば、映像等の撮影を行う撮像装置および撮像装置の制御方法、制御プログラムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
近年、画像認識技術の発達により、撮影した映像に応じて、被写体の動きに合わせてパン/チルト/ズームを動かす自動追従機能を備えた撮像装置が用いられている。
例えば、特許文献1には、撮像装置により撮像した画像から物体を検出する検出手段と、検出手段により検出した物体の動きに追従して撮像装置の撮像方向が変更されるように駆動装置を制御する制御手段と、検出手段により検出した物体の動き情報を判定する判定手段と、を有し、制御手段は、判定手段により判定した動き情報に応じて、駆動装置の駆動頻度を制御する制御装置について開示されている。
【0003】
このような制御装置では、被写体に垂直な方向(ロール方向)に回転させる機能および撮影映像をもとにロール方向における回転を制御する手法が無く、被写体の動きに伴う角度変化に合わせて映像を回転させることができなかった。
特許文献2には、ロール機構(雲台)を持つ撮像装置を含む撮像システムにおいて、ジャイロセンサを用いて撮影映像を水平にする構成が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-52231号公報
特開2013-179431号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献2に記載の撮像システムでは、以下に示すような問題点を有している。
すなわち、上記公報に開示された撮像システムでは、撮像装置がロール機構(雲台)を備え、ジャイロセンサを用いて撮影映像を水平にすることができるものの、撮影映像に応じてロール機構を含む各機構を適切に制御することはできなかった。
【0006】
特に、撮影映像における被写体の動きがあった場合において、その被写体のジェスチャ等による操作入力を検出しようとすると、被写体との位置関係によっては各機構の適切な制御を行うことが難しくなるおそれがある。
本開示の課題は、パン/チルト/ズーム方向において駆動される機構に加えてロール方向における回転機構を備えた撮像装置において、被写体の動きがあった場合でも被写体の実際の動きに応じて各機構を適切に制御することが可能な撮像装置および撮像装置の制御方法、制御プログラムを提供することにある。
【課題を解決するための手段】
【0007】
本開示に係る撮像装置は、本体部と、レンズと、撮像素子と、回転機構と、姿勢調整機構と、焦点位置駆動機構と、特徴点抽出部と、相対位置情報取得部と、距離情報取得部と、移動距離算出部と、制御部と、を備えている。レンズは、本体部に内包され光軸を有する。撮像素子は、レンズを通じて被写体側から入射してきた光を電気信号に変換して映像データを出力する。回転機構は、被写体に対して略垂直な方向において本体部を回転させる際の回転中心となるロール軸を中心に本体部を回転させる。姿勢調整機構は、パン方向およびチルト方向における本体部の向きの調整を行う。焦点位置駆動機構は、レンズの位置を変化させて被写体の焦点位置を制御する。特徴点抽出部は、映像データに含まれる被写体の特徴点を、追跡対象として抽出する。相対位置情報取得部は、映像の中の被写体の相対位置情報を取得する。距離情報取得部は、撮像素子の画素ごとの被写体までの距離に関する情報を取得する。移動距離算出部は、特徴点抽出部において抽出された特徴点の移動距離と、相対位置情報取得部において取得された映像の中の被写体の相対位置情報と、距離情報取得部において取得された被写体までの画素ごとの距離と、に応じて、追跡対象の実際の移動距離を算出する。制御部は、移動距離算出部において算出された実際の移動距離に応じて、回転機構、姿勢調整機構および焦点位置駆動機構の少なくとも1つを制御する。
【発明の効果】
【0008】
本開示に係る撮像装置によれば、パン/チルト/ズーム方向において駆動される機構に加えてロール方向における回転機構を備えた撮像装置において、被写体の動きがあった場合でも被写体の実際の動きに応じて各機構を適切に制御することができる。
【図面の簡単な説明】
【0009】
本開示の一実施形態に係る撮像装置の構成を示す全体斜視図。
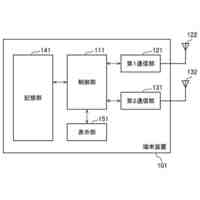
図1の撮像装置の制御ブロック図。
図1の撮像装置に対して特定のジェスチャによってパン/チルト方向における制御を行う一例を示す概念図。
図1の撮像装置に対して特定のジェスチャによってズーム制御を行う一例を示す概念図。
図1の撮像装置に対して特定のジェスチャによってロール方向における制御を行う一例を示す概念図。
図1の撮像装置において、被写体の実際の移動距離の計算方法を示す説明図。
図1の撮像装置において、パン/チルト方向において駆動された場合の被写体の実際の移動距離の算出方法を示す説明図。
図1の撮像装置に対して外部操作入力を行う際のジェスチャと機能との関係を示す図。
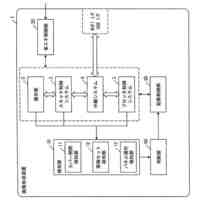
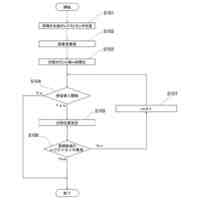
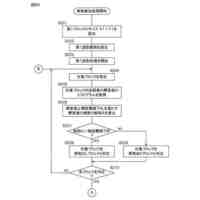
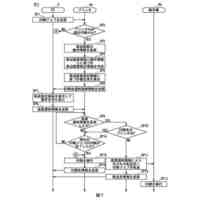
図1の撮像装置の制御方法の処理の一例(追跡対象特徴点の相対移動距離に基づく位置制御)を示すフローチャート。
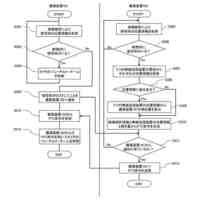
図1の撮像装置の制御方法の処理の一例(追跡対象特徴点の相対移動距離に基づく速度制御)を示すフローチャート。
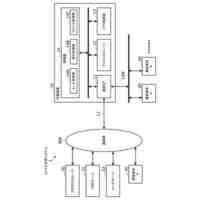
本開示の他の実施形態に係る撮像装置の構成を示す制御ブロック図。
図11の撮像装置の制御方法の処理の一例(パン/チルト/ズームそれぞれの駆動部の角度に基づく位置制御)を示すフローチャート。
図11の撮像装置の制御方法の処理の一例(パン/チルト/ズームそれぞれの駆動部の角度に基づく速度制御)を示すフローチャート。
本開示のさらに他の実施形態に係る撮像装置の構成を示す制御ブロック図。
図14の撮像装置の制御方法の処理の一例(ジャイロセンサから得た加速度に基づく位置制御)を示すフローチャート。
図14の撮像装置の制御方法の処理の一例(ジャイロセンサから得た加速度に基づく速度制御)を示すフローチャート。
【発明を実施するための形態】
【0010】
以下、適宜図面を参照しながら、実施の形態を詳細に説明する。ただし、必要以上に詳細な説明は省略する場合がある。例えば、既によく知られた事項の詳細説明や実質的に同一の構成に対する重複説明を省略する場合がある。これは、以下の説明が不必要に冗長になるのを避け、当業者の理解を容易にするためである。
なお、出願人は、当業者が本開示を十分に理解するために添付図面および以下の説明を提供するのであって、これらによって特許請求の範囲に記載の主題を限定することを意図するものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
イヤーマフ
3日前
個人
監視カメラシステム
12日前
キーコム株式会社
光伝送線路
13日前
WHISMR合同会社
収音装置
1か月前
個人
スキャン式車載用撮像装置
12日前
サクサ株式会社
中継装置
19日前
サクサ株式会社
中継装置
18日前
アイホン株式会社
電気機器
1か月前
キヤノン株式会社
撮像装置
2か月前
株式会社リコー
画像形成装置
5日前
株式会社リコー
画像形成装置
1か月前
キヤノン電子株式会社
画像読取装置
1か月前
個人
ワイヤレスイヤホン対応耳掛け
1か月前
キヤノン電子株式会社
画像読取装置
11日前
サクサ株式会社
無線システム
17日前
サクサ株式会社
無線通信装置
18日前
株式会社リコー
画像形成装置
2か月前
サクサ株式会社
無線通信装置
18日前
株式会社リコー
画像形成装置
2か月前
キヤノン株式会社
撮像システム
1か月前
株式会社ニコン
撮像装置
3か月前
ブラザー工業株式会社
読取装置
2か月前
個人
発信機及び発信方法
17日前
日本電気株式会社
海底分岐装置
13日前
株式会社NTTドコモ
端末
12日前
株式会社NTTドコモ
端末
13日前
沖電気工業株式会社
画像形成装置
28日前
株式会社NTTドコモ
端末
12日前
パテントフレア株式会社
超高速電波通信
1か月前
シャープ株式会社
端末装置
10日前
株式会社小糸製作所
画像照射装置
1か月前
パテントフレア株式会社
水中電波通信法
2か月前
大日本印刷株式会社
写真撮影装置
1か月前
株式会社松平商会
携帯機器カバー
1か月前
DXO株式会社
情報処理システム
2か月前
沖電気工業株式会社
画像形成装置
20日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ