TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025158980
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2025117062,2020177754
出願日
2025-07-11,2020-10-23
発明の名称
自動運転車向けサーマルイメージング
出願人
ウェイモ エルエルシー
代理人
個人
,
個人
主分類
G06V
10/764 20220101AFI20251009BHJP(計算;計数)
要約
【課題】機械学習技法を利用して、サーマルイメージングシステムにおける物体分類を向上させる。
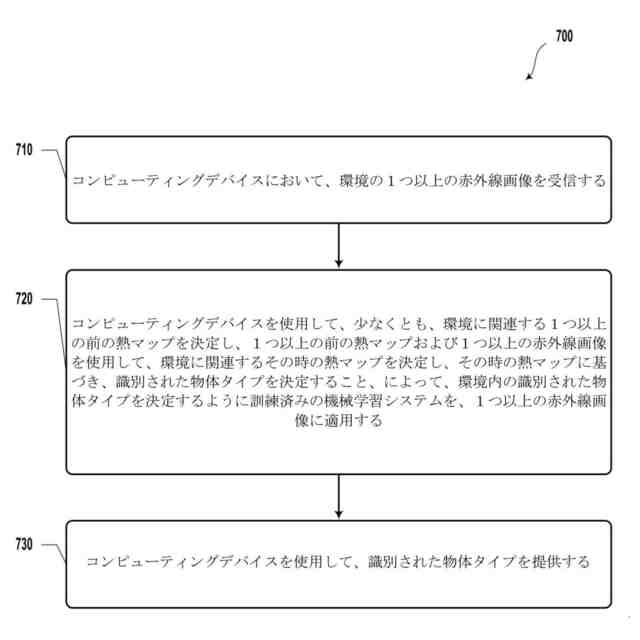
【解決手段】一実施形態例において、方法が提供される。この方法は、コンピューティングデバイスにおいて、環境の1つ以上の赤外線画像を受信することを含む。この方法は、コンピューティングデバイスを使用して、環境内の識別された物体タイプを決定するように訓練済みの機械学習システムを、1つ以上の赤外線画像に適用することをさらに含み、決定することが、少なくとも、環境に関連する1つ以上の前の熱マップを決定することと、1つ以上の前の熱マップおよび1つ以上の赤外線画像を使用して、環境に関連するその時の熱マップを決定することと、その時の熱マップに基づき、識別された物体タイプを決定することと、によって行われる。この方法は、コンピューティングデバイスを使用して、識別された物体タイプを提供することも含む。
【選択図】図7
特許請求の範囲
【請求項1】
コンピュータ実装方法であって、
コンピューティングデバイスにおいて、環境の1つ以上の赤外線画像を受信することと、
前記コンピューティングデバイスを使用して、前記環境内の識別された物体タイプを決定するように訓練済みの機械学習システムを、前記1つ以上の赤外線画像に適用することであって、前記決定することが、少なくとも、
前記環境に関連する1つ以上の前の熱マップを決定し、
前記1つ以上の前の熱マップおよび前記1つ以上の赤外線画像を使用して、前記環境に関連するその時の熱マップを決定し、また
前記その時の熱マップに基づいて、前記識別された物体タイプを決定することによって、行われる、適用することと、
前記コンピューティングデバイスを使用して、前記識別された物体タイプを提供することと、を含む、コンピュータ実装方法。
続きを表示(約 1,200 文字)
【請求項2】
前記識別された物体タイプが生物である、請求項1に記載のコンピュータ実装方法。
【請求項3】
前記1つ以上の前の熱マップを決定することが、
前記コンピューティングデバイスに通信可能に結合された複数のセンサから、前記環境のその時の熱状態を受信することと、
前記その時の熱状態に基づいて、前記コンピューティングデバイスに格納された複数の前の熱マップから前記1つ以上の前の熱マップを決定することと、を含む、請求項1に記載のコンピュータ実装方法。
【請求項4】
前記複数のセンサが、周囲温度センサ、全地球測位システム(GPS)センサ、および太陽のその時の位置を決定するように動作可能な太陽センサのうちの少なくとも1つで構成されている、請求項3に記載のコンピュータ実装方法。
【請求項5】
前記コンピューティングデバイスが、走査型レーザシステムに組み込まれ、前記1つ以上の前の熱マップの各々が、前記走査型レーザシステムの角度に関連しており、前記1つ以上の前の熱マップを決定することが、前記走査型レーザシステムのその時の角度にさらに基づく、請求項3に記載のコンピュータ実装方法。
【請求項6】
前記1つ以上の前の熱マップが、取り除かれた物体タイプに基づいて変更、編集、または削除されている1つ以上の領域を含む、請求項1に記載のコンピュータ実装方法。
【請求項7】
前記環境に関連する前記その時の熱マップを決定することが、前記1つ以上の前の熱マップに基づいて、前記1つ以上の赤外線画像の熱コントラストを較正することを含む、請求項1に記載のコンピュータ実装方法。
【請求項8】
LIDARシステムから受信したデータに基づいて、前記環境のその時の空間点群を決定することと、
前記その時の空間点群を使用して、前記環境内の物体を識別することと、
前記識別された物体の放射率値を計算することであって、前記識別された物体タイプを決定することが前記計算された放射率値にさらに基づく、計算することと、をさらに含む、請求項1に記載のコンピュータ実装方法。
【請求項9】
その時の熱マップが、前記1つ以上の赤外線画像上に投影された前記その時の空間点群を含む、請求項8に記載のコンピュータ実装方法。
【請求項10】
カメラシステムからのデータに基づいて、その時の可視光画像を決定することと、
前記その時の可視光画像を使用して、前記環境内の物体を識別することと、
前記識別された物体の放射率値を計算することであって、前記識別された物体タイプを決定することが前記計算された放射率値にさらに基づく、計算することと、をさらに含む、請求項1に記載のコンピュータ実装方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【背景技術】
【0001】
サーマル(または赤外線)イメージングデバイスを使用して、所与の環境内の物体を分類することができる。例えば、サーマルイメージングデバイスは、所与の物体に関するラジオメトリック情報を得ることができ、所与の物体の放射率値が推定され得る場合、この情報を利用して、所与の物体の温度を決定することができる。推定放射率値を有する多数の物体が関与している場合、サーマルイメージングデバイスは、物体間の温度のバラツキを決定することができ、次に、組成または物体のタイプに関する予測を行うことができる。
続きを表示(約 2,500 文字)
【発明の概要】
【0002】
本開示は、機械学習技法を有益に利用して、サーマルイメージングシステムにおける物体分類を向上させるものである。
【0003】
第1の態様では、方法が提供される。この方法は、コンピューティングデバイスにおいて、環境の1つ以上の赤外線画像を受信することを含む。この方法は、コンピューティングデバイスを使用して、環境内の識別された物体タイプを決定するように訓練済みの機械学習システムを、1つ以上の赤外線画像に適用することをさらに含む。訓練済み機械学習システムを適用することには、環境に関連する1つ以上の前の熱マップを決定することが含まれる。訓練済み機械学習システムを適用することは、1つ以上の前の熱マップおよび1つ以上の赤外線画像を使用して、環境に関連するその時の熱マップを決定し、その時の熱マップに基づいて、識別された物体タイプを決定することも含まれる。この方法は、コンピューティングデバイスを使用して、識別された物体タイプを提供することも含む。
【0004】
第2の態様では、方法が提供される。この方法は、コンピューティングデバイスにおいて、環境の1つ以上の赤外線画像を受信することを含む。この方法は、環境内の識別された物体タイプを決定するように、コンピューティングデバイスを使用して、1つ以上の赤外線画像において機械学習システムを訓練することをさらに含む。機械学習システムを訓練することには、環境に関連する1つ以上の前の熱マップを決定するように、機械学習システムを訓練することが含まれる。機械学習システムを訓練することには、1つ以上の前の熱マップおよび1つ以上の赤外線画像を使用して、環境に関連するその時の熱マップを決定するように機械学習システムを訓練し、その時の熱マップを使用して識別された物体タイプを決定するように、機械学習システムを訓練することも含まれる。この方法は、コンピューティングデバイスを使用して、訓練済み機械学習システムを提供することも含む。
【0005】
第3の態様では、コンピューティングデバイスが提供される。コンピューティングデバイスは、1つ以上のプロセッサおよびデータ記憶域を含む。データ記憶域には、1つ以上のプロセッサによって実行されると、コンピューティングデバイスに、動作を行わせる、コンピュータ実行可能命令が格納されている。この動作には、環境から撮影された1つ以上の赤外線画像を受信することが含まれる。この動作には、環境内の識別された物体タイプを決定するように訓練済みの機械学習システムを1つ以上の赤外線画像に適用することも含まれる。訓練済み機械学習システムを適用することには、環境に関連する1つ以上の前の熱マップを決定することが含まれる。訓練済み機械学習システムを適用することは、1つ以上の前の熱マップおよび1つ以上の赤外線画像を使用して、環境に関連するその時の熱マップを決定し、その時の熱マップに基づいて、識別された物体タイプを決定することも含まれる。この動作には、識別された物体タイプを提供することがさらに含まれる。
【0006】
他の態様、実施形態、および実装形態は、当業者には、以下の詳細な説明を添付の図面を適宜参照して読み取ることにより明らかになるであろう。
【図面の簡単な説明】
【0007】
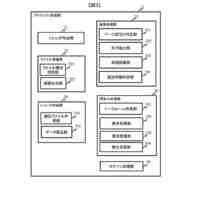
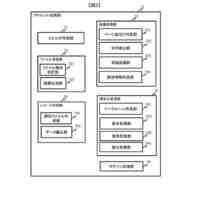
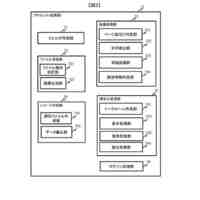
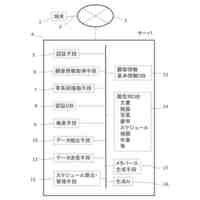
実施形態例による、車両のブロック図を示す。
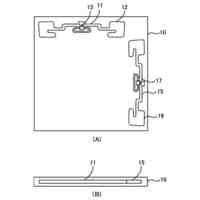
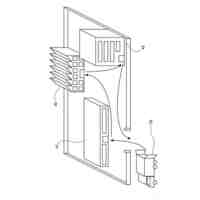
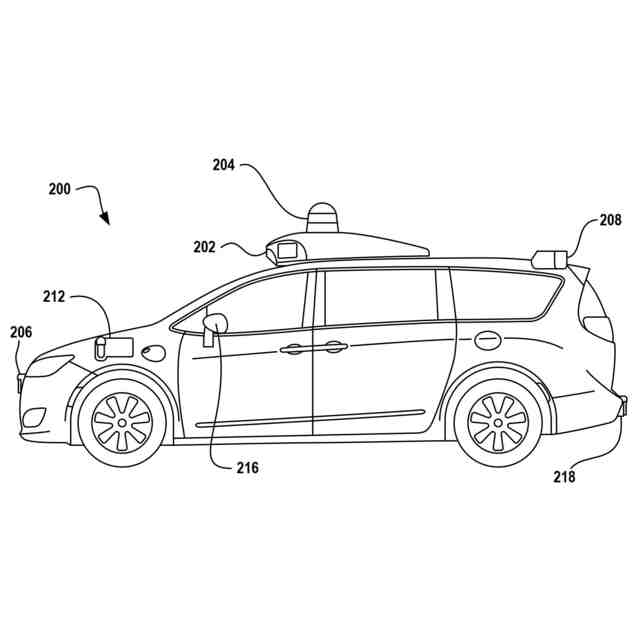
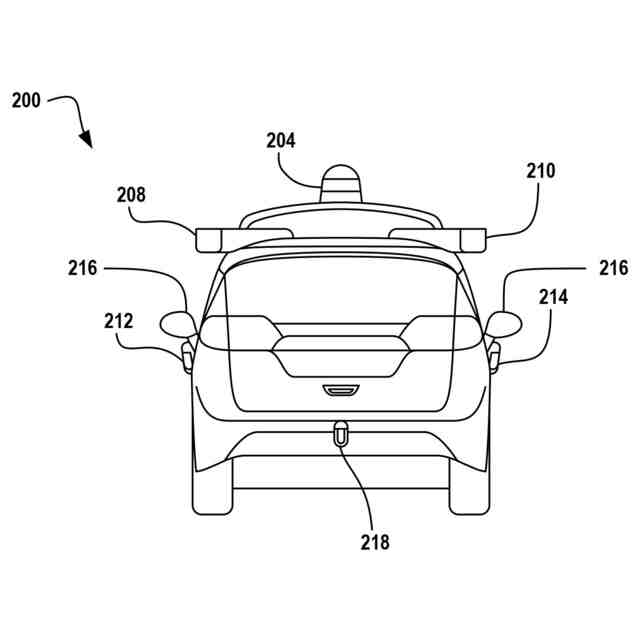
実施形態例による車両の物理的構成を示す。
実施形態例による車両の物理的構成を示す。
実施形態例による車両の物理的構成を示す。
実施形態例による車両の物理的構成を示す。
実施形態例による車両の物理的構成を示す。
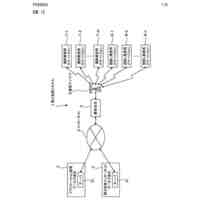
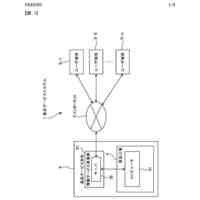
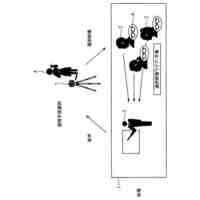
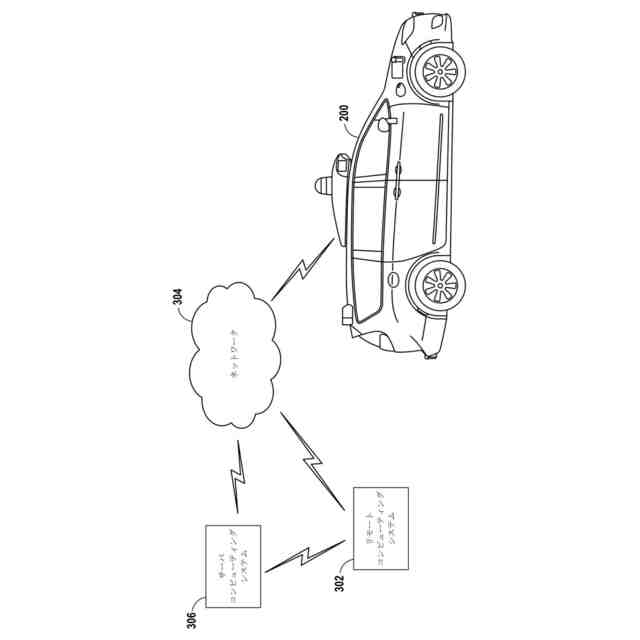
実施施形態例による、車両に関係している様々なコンピューティングシステム間の無線通信を示す。
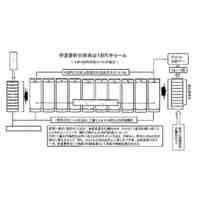
実施形態例による、機械学習モデルの学習フェーズおよび推論フェーズを示す。
実施形態例による、システムを示す。
実施形態例による、熱機械学習モデルの態様を示す。
実施形態例による、放射率機械学習モデルの態様を示す。
実施形態例による、方法を示す。
実施形態例による、方法を示す。
【発明を実施するための形態】
【0008】
方法、デバイス、およびシステムの例が本明細書において説明される。「例(example)」および「例示的(exemplary)」という語は、本明細書においては、「例、事例、または例示としての役割を果たす(serving as an example,instance,or illustration)」ことを意味するために使用されることを理解されたい。本明細書において「例」または「例示的」であるとして説明されるいずれの実施形態または特徴も、他の実施形態または特徴よりも好ましい、または有利であると必ずしも解釈されるべきではない。本明細書において提示される主題の範囲から逸脱することなく、他の実施形態を利用することができ、他の変更を行うことができる。
【0009】
このように、本明細書において説明される実施形態例は、限定を意味するものではない。本明細書において概略説明され、図に例示される本開示の態様は、多種多様な異なる構成で配置する、置き換える、組み合わせる、分離する、および設計することができ、これらの構成の全てが本明細において考えられる。
【0010】
さらに、文脈上、そうではないことを示していない限り、これらの図の各図に示されている特徴は、互いに組み合わせて使用することができる。このように、図は、大抵、例示されるすべての特徴が実施形態ごとに必要であるわけではないという理解の下に、1つ以上の実施形態全体の構成要素側面として考えられるべきである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ウェイモ エルエルシー
車両レーダ調整及び干渉低減のための方法及びシステム
9日前
ウェイモ エルエルシー
光検出および測距(LiDAR)装置ならびにカメラにおける欠陥検出のための時間的に変調された光の放射
1日前
個人
詐欺保険
23日前
個人
縁伊達ポイン
23日前
個人
RFタグシート
10日前
個人
QRコードの彩色
27日前
個人
地球保全システム
1か月前
個人
ペルソナ認証方式
7日前
個人
自動調理装置
9日前
個人
情報処理装置
2日前
個人
冷凍食品輸出支援構造
2か月前
個人
為替ポイント伊達夢貯
2か月前
個人
残土処理システム
29日前
個人
農作物用途分配システム
22日前
個人
表変換編集支援システム
1か月前
個人
知財出願支援AIシステム
2か月前
個人
知的財産出願支援システム
1か月前
個人
インターネットの利用構造
6日前
個人
タッチパネル操作指代替具
16日前
個人
携帯端末障害問合せシステム
15日前
個人
スケジュール調整プログラム
15日前
個人
AIによる情報の売買の仲介
2か月前
個人
行動時間管理システム
1か月前
個人
パスワード管理支援システム
1か月前
株式会社キーエンス
受発注システム
1か月前
個人
海外支援型農作物活用システム
1か月前
個人
食品レシピ生成システム
1か月前
個人
AIキャラクター制御システム
1か月前
株式会社キーエンス
受発注システム
1か月前
株式会社キーエンス
受発注システム
1か月前
個人
エリアガイドナビAIシステム
7日前
日本精機株式会社
施工管理システム
2か月前
個人
システム及びプログラム
1か月前
個人
未来型家系図構築システム
1か月前
株式会社ワコム
電子ペン
1日前
トヨタ自動車株式会社
通知装置
13日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ