TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025148740
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049015
出願日
2024-03-26
発明の名称
情報処理装置、情報処理方法及びプログラム
出願人
三菱重工業株式会社
,
国立大学法人 筑波大学
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/246 20240101AFI20251001BHJP(制御;調整)
要約
【課題】移動体に自己位置を適切に推定させる。
【解決手段】情報処理装置は、対象領域の地図情報と、対象位置情報と、第1環境情報と、を取得する情報取得部と、ランドマーク設定位置の情報を取得する設定位置取得部と、ランドマーク設定位置と第1環境情報とに基づいて、ランドマークがランドマーク設定位置に配置され、かつ移動体が対象位置に位置する際に、移動体により検出されると推定される、ランドマークの位置であるランドマーク推定位置を算出する推定位置算出部と、地図情報、第1環境情報、ランドマーク設定位置及びランドマーク推定位置に基づいて、移動体の位置推定のロバスト性の評価値を算出する評価部と、を含む。
【選択図】図6
特許請求の範囲
【請求項1】
対象領域の地図情報と、前記対象領域内での対象位置を示す対象位置情報と、前記対象位置に位置する移動体に検出される周囲環境の情報である第1環境情報と、を取得する情報取得部と、
前記対象領域内でランドマークが配置される位置の候補となるランドマーク設定位置の情報を取得する設定位置取得部と、
前記ランドマーク設定位置と前記第1環境情報とに基づいて、前記ランドマークが前記ランドマーク設定位置に配置され、かつ前記移動体が前記対象位置に位置する際に、前記移動体により検出されると推定される、前記ランドマークの位置であるランドマーク推定位置を算出する推定位置算出部と、
前記地図情報、前記第1環境情報、前記ランドマーク設定位置及び前記ランドマーク推定位置に基づいて、前記移動体の位置推定のロバスト性の評価値を算出する評価部と、
を含む、
情報処理装置。
続きを表示(約 1,400 文字)
【請求項2】
前記地図情報、前記第1環境情報、前記ランドマーク設定位置及び前記ランドマーク推定位置に基づいて、前記移動体の位置推定を行うことで、前記移動体が位置すると推定される推定位置を算出する位置推定部を更に含み、
前記評価部は、前記推定位置と前記対象位置とに基づいて、前記位置推定のロバスト性の評価値を算出する、
請求項1に記載の情報処理装置。
【請求項3】
前記位置推定部は、
前記地図情報に基づき、前記移動体が、前記推定位置の候補位置に位置すると仮定した際に前記移動体により検出される周囲環境の情報である第2環境情報を算出し、
前記第1環境情報と前記第2環境情報とのずれ量、及び前記ランドマーク設定位置と前記ランドマーク推定位置とのずれ量に基づいて、前記推定位置を決定する、
請求項2に記載の情報処理装置。
【請求項4】
前記位置推定部は、前記第1環境情報と前記第2環境情報とのずれ量、及び前記ランドマーク設定位置と前記ランドマーク推定位置とのずれ量が、最適となるように最適化計算を実行して、前記推定位置を算出する、
請求項3に記載の情報処理装置。
【請求項5】
前記位置推定部は、前記ランドマーク設定位置と前記ランドマーク推定位置とのずれ量が前記最適化計算に及ぼす影響度合いを、前記第1環境情報と前記第2環境情報とのずれ量が前記最適化計算に及ぼす影響度合いよりも高くする、
請求項4に記載の情報処理装置。
【請求項6】
前記位置推定部は、前記対象位置に基づいて、互いに位置が異なる複数の初期位置を設定し、前記初期位置毎に前記推定位置を算出し、
前記評価部は、前記推定位置毎の、前記推定位置と前記対象位置との差分に基づいて、前記評価値を算出する、
請求項2から請求項5のいずれか1項に記載の情報処理装置。
【請求項7】
前記評価値に関する情報を出力する出力制御部を更に含む、
請求項1から請求項5のいずれか1項に記載の情報処理装置。
【請求項8】
前記設定位置取得部、前記推定位置算出部、及び前記位置推定部は、前記ランドマーク設定位置及び前記ランドマーク推定位置を用いずに、前記地図情報及び前記第1環境情報を用いて算出した前記推定位置に基づいた前記評価値が、所定条件を満たさない場合に、前記ランドマーク設定位置を取得し、前記ランドマーク推定位置を算出し、前記推定位置を算出する、
請求項2から請求項5のいずれか1項に記載の情報処理装置。
【請求項9】
前記設定位置取得部は、前記ランドマーク設定位置及び前記ランドマーク推定位置を用いずに、前記地図情報及び前記第1環境情報を用いて算出した前記推定位置に基づいた前記評価値に基づいて、前記ランドマーク設定位置を設定する、
請求項2から請求項5のいずれか1項に記載の情報処理装置。
【請求項10】
前記設定位置取得部は、前記地図情報と前記対象位置とに基づき、前記対象位置から観測できる位置を抽出して、前記観測できる位置を前記ランドマーク設定位置に設定する、
請求項9に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理装置、情報処理方法及びプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
自己位置を推定しながら移動する移動体が知られている。自己位置の推定方法としては、移動体が移動する領域に予めランドマークを配置しておき、移動体にランドマークの位置を検出させる方法や、移動体に周囲環境を検出させる方法などがある。例えば特許文献1には、ランドマークの配置及び周囲の地形データを取得し、ランドマークの配置を示したランドマーク地図に基づいて自己位置の所在する範囲を推定し、周囲の地形データを示した地形データ地図に基づいて、自己位置が所在する範囲から自己位置を推定する旨が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-177289号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、移動体に自己位置を適切に推定させるには、改善の余地がある。
【0005】
本開示は、移動体に自己位置を適切に推定させることが可能な情報処理装置、情報処理方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る情報処理装置は、対象領域の地図情報と、前記対象領域内での対象位置を示す対象位置情報と、前記対象位置に位置する移動体に検出される周囲環境の情報である第1環境情報と、を取得する情報取得部と、前記対象領域内でランドマークが配置される位置の候補となるランドマーク設定位置の情報を取得する設定位置取得部と、前記ランドマーク設定位置と前記第1環境情報とに基づいて、前記ランドマークが前記ランドマーク設定位置に配置され、かつ前記移動体が前記対象位置に位置する際に、前記移動体により検出されると推定される、前記ランドマークの位置であるランドマーク推定位置を算出する推定位置算出部と、前記地図情報、前記第1環境情報、前記ランドマーク設定位置及び前記ランドマーク推定位置に基づいて、前記移動体の位置推定のロバスト性の評価値を算出する評価部と、を含む。
【0007】
本開示に係る情報処理方法は、対象領域の地図情報と、前記対象領域内での対象位置を示す対象位置情報と、前記対象位置に位置する移動体に検出される周囲環境の情報である第1環境情報と、を取得するステップと、前記対象領域内でランドマークが配置される位置の候補となるランドマーク設定位置の情報を取得するステップと、前記ランドマーク設定位置と前記第1環境情報とに基づいて、前記ランドマークが前記ランドマーク設定位置に配置され、かつ前記移動体が前記対象位置に位置する際に、前記移動体により検出されると推定される、前記ランドマークの位置であるランドマーク推定位置を算出するステップと、前記地図情報、前記第1環境情報、前記ランドマーク設定位置及び前記ランドマーク推定位置に基づいて、前記移動体の位置推定のロバスト性の評価値を算出するステップと、を含む。
【0008】
本開示に係るプログラムは、対象領域の地図情報と、前記対象領域内での対象位置を示す対象位置情報と、前記対象位置に位置する移動体に検出される周囲環境の情報である第1環境情報と、を取得するステップと、前記対象領域内でランドマークが配置される位置の候補となるランドマーク設定位置の情報を取得するステップと、前記ランドマーク設定位置と前記第1環境情報とに基づいて、前記ランドマークが前記ランドマーク設定位置に配置され、かつ前記移動体が前記対象位置に位置する際に、前記移動体により検出されると推定される、前記ランドマークの位置であるランドマーク推定位置を算出するステップと、前記地図情報、前記第1環境情報、前記ランドマーク設定位置及び前記ランドマーク推定位置に基づいて、前記移動体の位置推定のロバスト性の評価値を算出するステップと、をコンピュータに実行させる。
【発明の効果】
【0009】
本開示によれば、移動体に自己位置を適切に推定させることができる。
【図面の簡単な説明】
【0010】
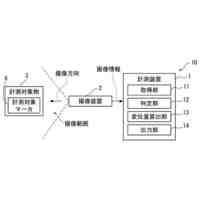
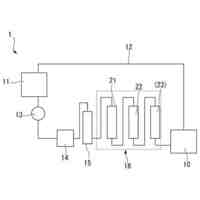
図1は、本実施形態に係る移動管理システムの模式図である。
図2は、移動体の構成の模式図である。
図3は、情報処理装置の模式的なブロック図である。
図4は、推定位置の算出方法の例を示す模式図である。
図5は、ランドマーク設置位置及びランドマーク設定位置の例を説明する模式図である。
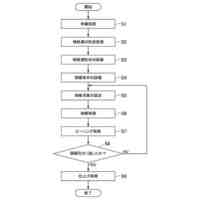
図6は、本実施形態に係る情報処理装置の処理フローを説明するフローチャートである。
図7は、移動体の制御装置の模式的なブロック図である。
図8は、ランドマーク設定位置の設定方法の一例を説明する模式図である。
図9は、ランドマーク設定位置の設定方法の一例を説明する模式図である。
図10は、ランドマーク設定位置の設定方法の一例を説明する模式図である。
図11は、ランドマーク設定位置の設定方法の一例を説明するフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱重工業株式会社
原子炉
6日前
三菱重工業株式会社
ボイラ壁
25日前
三菱重工業株式会社
施工方法
12日前
三菱重工業株式会社
燃焼筒の取付方法
25日前
三菱重工業株式会社
石膏脱水システム
12日前
三菱重工業株式会社
ガスタービン起動方法
21日前
三菱重工業株式会社
蒸気タービンシステム
21日前
三菱重工業株式会社
原子炉炉心および原子炉
6日前
三菱重工業株式会社
シール装置及び回転機械
11日前
三菱重工業株式会社
アンモニア除害システム
12日前
三菱重工業株式会社
ガス処理装置および方法
19日前
三菱重工業株式会社
軸流圧縮機、及びその動翼
13日前
三菱重工業株式会社
計測システムおよび計測方法
19日前
三菱重工業株式会社
レドックスフロー電池システム
25日前
三菱重工業株式会社
支持部材及び接着剤の監視方法
12日前
三菱重工業株式会社
水素吸蔵材料および原子力設備
20日前
三菱重工業株式会社
インバータ装置及びその保護方法
19日前
三菱重工業株式会社
電動ファンおよび電動垂直離着陸機
22日前
三菱重工業株式会社
インバータ基板及びインバータ装置
19日前
三菱重工業株式会社
燃料製造システム、及び燃料製造方法
14日前
三菱重工業株式会社
RPB装置及び酸性ガス回収システム
19日前
三菱重工業株式会社
圧縮機の静翼セグメント、及び圧縮機
12日前
三菱重工業株式会社
補修方法、プログラム、及び補修装置
13日前
三菱重工業株式会社
合流支援システム、および合流支援方法
14日前
三菱重工業株式会社
超音波探傷装置、および超音波探傷方法
11日前
三菱重工業株式会社
ガスタービン発電プラント、及びその運転方法
25日前
三菱重工業株式会社
静翼セグメント、及びこれを備える蒸気タービン
4日前
三菱重工業株式会社
水電解システム、及び水電解システムの運転方法
19日前
三菱重工業株式会社
触媒及びその製造方法、並びに炭化水素の製造方法
20日前
三菱重工業株式会社
制御装置、制御方法、監視システム及びプログラム
20日前
三菱重工業株式会社
二酸化炭素回収システム及び二酸化炭素回収システムの運転方法
13日前
三菱重工業株式会社
制御装置、ガスタービンの燃料供給設備、制御方法及びプログラム
22日前
三菱重工業株式会社
多ビーム位相差計測装置及びこれを備えたレーザビーム制御システム
19日前
三菱重工業株式会社
フォールトツリー作成方法、フォールトツリー作成装置およびプログラム
25日前
三菱重工業株式会社
レーザ照射装置、レーザ照射システム、レーザ照射方法、およびプログラム
11日前
三菱重工業株式会社
プラント制御支援装置、プラント制御支援方法、及び、プラント制御支援プログラム
12日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ