TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025147786
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024048205
出願日
2024-03-25
発明の名称
データ処理装置、学習データ生成装置、データ処理方法及び学習データ生成方法
出願人
セコム株式会社
代理人
個人
,
個人
,
個人
主分類
G06T
7/70 20170101AFI20250930BHJP(計算;計数)
要約
【課題】入力データ内における認識対象の位置の判定結果に基づいて所定の認識処理を行う際の認識精度を向上する。
【解決手段】データ処理装置10は、入力データ内における認識対象の位置である対象位置を出力する検出部21と、入力データと対象位置とに基づいて対象位置を修正した修正位置を出力する修正部22と、少なくとも修正位置に基づいて認識対象に関する所定の認識処理を実行する処理部23と、を備える。修正部22は、処理部23における認識処理の精度が向上するように入力データと対象位置とに対する修正位置を学習した学習モデルである。
【選択図】図2
特許請求の範囲
【請求項1】
入力データ内における認識対象の位置である対象位置を出力する検出部と、
前記入力データと前記対象位置とに基づいて前記対象位置を修正した修正位置を出力する修正部と、
少なくとも前記修正位置に基づいて前記認識対象に関する所定の認識処理を実行する処理部と、を備え、
前記修正部は、前記処理部における前記認識処理の精度が向上するように、前記入力データと前記対象位置とに対する前記修正位置を学習した学習モデルである、
ことを備えることを特徴とするデータ処理装置。
続きを表示(約 1,700 文字)
【請求項2】
前記処理部は、前記認識対象に関して予め学習した学習済みクラスを認識する学習モデルであり、
前記修正部は、前記処理部が前記修正位置に基づいて前記学習済みクラスを認識する際の、前記処理部による処理結果と前記学習済みクラスとの間の誤差が減少するように学習された学習モデルである、
ことを特徴とする請求項1に記載のデータ処理装置。
【請求項3】
前記処理部は、前記入力データと前記修正位置とに基づいて前記認識対象に関する所定の認識処理を実行することを特徴とする請求項1に記載のデータ処理装置。
【請求項4】
前記処理部は、前記認識対象に関して予め学習した学習済みクラスを認識する学習モデルであり、
前記修正部は、前記学習済みクラスを含んだ前記入力データから、前記処理部が前記修正位置に基づいて前記学習済みクラスを認識する際の、前記処理部による処理結果と前記学習済みクラスとの間の誤差が減少するように学習された学習モデルである、
ことを特徴とする請求項3に記載のデータ処理装置。
【請求項5】
前記入力データは画像データであり、前記対象位置は前記画像データにおける前記認識対象が占める画像範囲であることを特徴とする請求項1に記載のデータ処理装置。
【請求項6】
前記入力データは画像データであり、前記認識対象は多関節体であり、前記対象位置は前記画像データ上の前記認識対象の関接位置であることを特徴とする請求項1に記載のデータ処理装置。
【請求項7】
前記入力データは音声データであり、前記対象位置は前記音声データにおいて前記認識対象が占める範囲の開始位置と終了位置であることを特徴とする請求項1に記載のデータ処理装置。
【請求項8】
入力データ内における認識対象の位置である対象位置を出力する位置検出器の学習データを生成する学習データ生成装置であって、
前記入力データ内における前記認識対象の位置である対象位置を出力する検出部と、
前記入力データと前記対象位置とに基づいて前記対象位置を修正した修正位置を出力する修正部と、
前記修正部が出力する前記修正位置と前記入力データとから前記学習データを出力する学習データ出力部と、
を備え、
前記修正部は、前記入力データと前記修正部が出力した前記修正位置とに基づいて、前記入力データに含まれる認識対象に関する所定の認識処理を実行したときの認識精度が向上するように、前記入力データと前記対象位置とに対する前記修正位置を学習した学習モデルである、
ことを特徴とする学習データ生成装置。
【請求項9】
入力データ内における認識対象の位置である対象位置を決定し、
前記入力データと前記対象位置とに基づいて前記対象位置を修正した修正位置を学習モデルにより決定し、
少なくとも前記修正位置に基づいて前記認識対象に関する所定の認識処理を実行し、
前記認識処理の精度が向上するように、前記学習モデルが前記入力データと前記対象位置とに対して出力する前記修正位置を学習する、
ことを備えることを特徴とするデータ処理方法。
【請求項10】
入力データ内における認識対象の位置である対象位置を出力する位置検出器の学習データを生成する学習データ生成方法であって、
前記入力データ内における前記認識対象の位置である対象位置を決定し、
前記入力データと前記対象位置とに基づいて前記対象位置を学習モデルにより修正した修正位置を出力し、
前記修正位置と前記入力データとから前記学習データを出力し、
前記入力データと前記学習モデルが出力した前記修正位置とに基づいて、前記入力データに含まれる認識対象に関する所定の認識処理を実行したときの認識精度が向上するように、前記学習モデルが前記入力データと前記対象位置とに対して出力する前記修正位置を学習する、
ことを特徴とする学習データ生成方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、データ処理装置、学習データ生成装置、データ処理方法及び学習データ生成方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
入力データ内における認識対象の位置を判定して、判定した位置に基づいて認識対象に関する所定の認識処理を実行する技術が知られている。
例えば下記特許文献1に記載の追跡装置は、異なる複数の時刻で順次取得した入力画像から追跡対象が写っている対象領域を検出し、同一の追跡対象の対象領域どうしを対応付けることにより同一の追跡対象を追跡する。
【先行技術文献】
【特許文献】
【0003】
特開2023-147846号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、入力データ内における認識対象の位置の判定結果が、その後の認識処理に適した位置でないと、認識処理の認識精度が低下する虞がある。
本発明は、上記の問題点を鑑みてなされたものであり、入力データ内における認識対象の位置の判定結果に基づいて所定の認識処理を行う際の認識精度を向上することを目的とする。
【課題を解決するための手段】
【0005】
本発明の一形態によるデータ処理装置は、入力データ内における認識対象の位置である対象位置を出力する検出部と、入力データと対象位置とに基づいて対象位置を修正した修正位置を出力する修正部と、少なくとも修正位置に基づいて認識対象に関する所定の認識処理を実行する処理部と、を備える。修正部は、処理部における認識処理の精度が向上するように入力データと対象位置とに対する修正位置を学習した学習モデルである。
【0006】
本発明の他の形態によれば、入力データ内における認識対象の位置である対象位置を出力する位置検出器の学習データを生成する学習データ生成装置が与えられる。学習データ生成装置は、入力データ内における認識対象の位置である対象位置を出力する検出部と、入力データと対象位置とに基づいて対象位置を修正した修正位置を出力する修正部と、修正部が出力する修正位置と入力データとから学習データを出力する学習データ出力部と、を備える。修正部は、入力データと修正部が出力した修正位置とに基づいて、入力データに含まれる認識対象に関する所定の認識処理を実行したときの認識精度が向上するように、入力データと対象位置とに対する修正位置を学習した学習モデルである。
【発明の効果】
【0007】
本発明によれば、入力データ内における認識対象の位置の判定結果に基づいて所定の認識処理を行う際の認識精度を向上できる。
【図面の簡単な説明】
【0008】
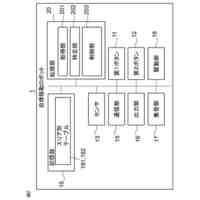
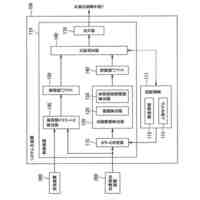
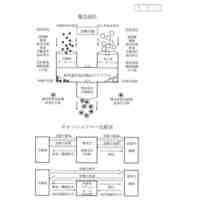
実施形態のデータ処理装置を含んだ認識システムの全体構成の一例の概略図である。
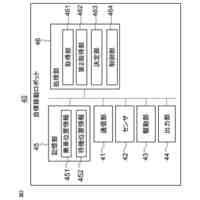
実施形態のデータ処理装置の機能構成の一例を示すブロック図である。
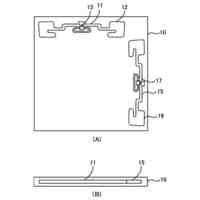
(a)~(c)は入力データ、対象位置及び修正位置の第1例の模式図である。
(a)~(c)は入力データ、対象位置及び修正位置の第2例の模式図である。
(a)~(c)は入力データ、対象位置及び修正位置の第3例の模式図である。
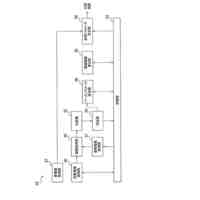
修正部の学習に用いる学習装置の全体構成の一例の概略図である。
修正部の学習に用いる学習装置の機能構成の一例を示すブロック図である。
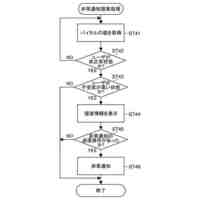
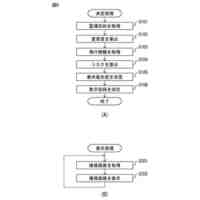
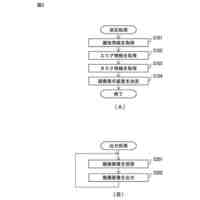
(a)は修正部の学習方法の一例のフローチャートであり、(b)は実施形態のデータ処理方法の一例のフローチャートである。
【発明を実施するための形態】
【0009】
以下において、図面を参照して本発明の実施形態を説明する。なお、以下に示す本発明の実施形態は、本発明の技術的思想を具体化するための装置や方法を例示するものであって、本発明の技術的思想は、構成部品の構造、配置等を下記のものに特定するものではない。本発明の技術的思想は、特許請求の範囲に記載された請求項が規定する技術的範囲内において、種々の変更を加えることができる。
【0010】
本発明の実施形態のデータ処理装置は、入力データ内における認識対象の位置を判定して、判定した位置に基づいて認識対象に関する所定の認識処理を実行する。
例えば実施形態のデータ処理装置による認識処理は、認識対象を撮影した画像データに基づいて認識対象に関する何らかの情報を認識する処理であってよい。例えば実施形態のデータ処理装置による認識処理は、画像データ上の物体(例えば人物や車両など)の再識別(ReID:Re-IDentification)処理や、物体の属性推定処理であってよい。また例えば実施形態のデータ処理装置による認識処理は、画像データ上の多関節体(例えば人物、動物や多関節ロボットなど)の姿勢推定処理であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セコム株式会社
自律移動ロボット
1か月前
セコム株式会社
火災監視システム
1か月前
セコム株式会社
表示機能付き認証装置
1か月前
セコム株式会社
業務見守りシステム及びプログラム
2日前
セコム株式会社
データ処理装置及びデータ処理方法
1か月前
セコム株式会社
生活見守りシステム及びプログラム
1か月前
セコム株式会社
業務見守りシステム及びプログラム
2日前
セコム株式会社
生活見守りシステム及びプログラム
1か月前
セコム株式会社
自律移動ロボットおよび制御システム
1か月前
セコム株式会社
自律移動ロボットおよび制御システム
1か月前
セコム株式会社
対話システム、対話方法及びセンタ装置
1か月前
セコム株式会社
センタ装置、対話システム及び対話方法
1か月前
セコム株式会社
端末所持者検知装置及び端末所持者検知方法
1か月前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
1か月前
株式会社デンソーウェーブ
通行管理システム
1か月前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
1か月前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
1か月前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
1か月前
セコム株式会社
自律飛行ロボットの飛行制御システム及び飛行制御方法
1か月前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1か月前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1か月前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1か月前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1か月前
セコム株式会社
データ処理装置、学習データ生成装置、データ処理方法及び学習データ生成方法
1か月前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
1か月前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
1か月前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
25日前
セコム株式会社
携帯端末、警備システム、プログラム及び表示方法
2か月前
個人
詐欺保険
1か月前
個人
縁伊達ポイン
1か月前
個人
RFタグシート
1か月前
個人
職業自動販売機
16日前
個人
5掛けポイント
23日前
個人
ペルソナ認証方式
1か月前
個人
地球保全システム
2か月前
個人
QRコードの彩色
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ