TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025154572
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057653
出願日
2024-03-29
発明の名称
自律移動ロボットおよび制御システム
出願人
セコム株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/435 20240101AFI20251002BHJP(制御;調整)
要約
【課題】自律移動ロボットと人物との間で相乗り乗車をする場合、乗降車の妨げとならない乗車方法を決定することができる自律移動ロボットを提供する。
【解決手段】エレベータを利用して複数の階の間を移動可能な自律移動ロボットであって、自律移動ロボットの行先階または乗車階を示す階情報を取得する取得部と、階情報に基づいて、自律移動ロボットのエレベータの乗りかごにおける人物との相乗り乗車に関する乗車方法を決定する決定部と、を有する。
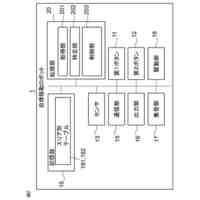
【選択図】図2
特許請求の範囲
【請求項1】
エレベータを利用して複数の階の間を移動可能な自律移動ロボットであって、
前記自律移動ロボットの行先階または乗車階を示す階情報を取得する取得部と、
前記階情報に基づいて、前記エレベータの乗りかごにおける人物との相乗り乗車に関する乗車方法を決定する決定部と、
を備えることを特徴とする自律移動ロボット。
続きを表示(約 1,200 文字)
【請求項2】
前記乗りかごに乗車している人物または前記乗りかごへの乗車を待機している人物に関する人物情報を取得する第2取得部を有し、
前記決定部は、前記人物情報に基づいて前記乗車方法を決定する、
ことを特徴とする請求項1に記載の自律移動ロボット。
【請求項3】
前記決定部は、前記乗車方法として、前記自律移動ロボットが前記乗りかごに乗車する乗車タイミング、前記乗りかご内における前記自律移動ロボットの乗車位置、前記自律移動ロボットが前記乗りかごへの乗車を待機する待機位置のうち少なくとも1つを決定する、
ことを特徴とする請求項1または2に記載の自律移動ロボット。
【請求項4】
前記決定部は、前記行先階までの移動階数が所定階数以下である場合、待機中の人物が前記乗りかごに乗車した後を前記乗車タイミングに決定する、
ことを特徴とする請求項3に記載の自律移動ロボット。
【請求項5】
前記決定部は、前記行先階が予め定められた高層階または予め定められた低層階である場合、待機中の人物が前記乗りかごに乗車する前を前記乗車タイミングに決定する、
ことを特徴とする請求項3に記載の自律移動ロボット。
【請求項6】
前記決定部は、前記乗車階が予め定められた高層階でありかつ前記乗りかごの移動方向が上昇方向である場合、または、前記乗車階が予め定められた低層階でありかつ前記乗りかごの移動方向が下降方向である場合、待機中の人物が前記乗りかごに乗車した後を前記乗車タイミングに決定する、
ことを特徴とする請求項3に記載の自律移動ロボット。
【請求項7】
前記決定部は、前記行先階までの移動階数が所定階数以下である場合、前記乗りかごの扉の近傍を前記自律移動ロボットの前記乗車位置に決定する、
ことを特徴とする請求項3に記載の自律移動ロボット。
【請求項8】
前記決定部は、前記行先階が予め定められた高層階または予め定められた低層階である場合、前記乗りかごの扉から離れた遠方を前記自律移動ロボットの前記乗車位置に決定する、
ことを特徴とする請求項3に記載の自律移動ロボット。
【請求項9】
前記決定部は、前記乗車階が予め定められた高層階でありかつ前記乗りかごの移動方向が上昇方向である場合、または、前記乗車階が予め定められた低層階でありかつ前記乗りかごの移動方向が下降方向である場合、前記乗りかごの扉の近傍を前記自律移動ロボットの前記乗車位置に決定する、
ことを特徴とする請求項3に記載の自律移動ロボット。
【請求項10】
前記決定部は、待機中の人物が前記乗りかごに乗車する前を前記乗車タイミングに決定した場合、前記エレベータの扉から所定範囲内を前記待機位置に決定する、
ことを特徴とする請求項3に記載の自律移動ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律移動ロボットおよび制御システムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
近年、建物等において予め定められた巡回ルートを自律移動し、巡回ルート上の歩行者や障害物を自動的に避けて移動する自律移動ロボットが開発されている。
【0003】
特許文献1には、同乗対象となる複数台のエレベータ活用型ロボットの占有情報と、乗りかごのスペース情報と、複数台のエレベータ活用型ロボットの複数分の降車階の情報とから、複数台のエレベータ活用型ロボットの乗車すべき順序を決定することが開示されている。特許文献2には、自律移動体の行先階に基づいて、自律移動体の降車順序を決定することが開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第5924672号公報
特許第6308341号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
エレベータを利用して移動する自律移動ロボットでは、エレベータの乗りかごにおいて人物と相乗り乗車をする場合に、適切に乗車することが求められている。
【0006】
本発明の目的は、エレベータの乗りかごにおける人物との相乗り乗車に関する乗車方法を適切に決定することができる自律移動ロボットおよび制御システムを提供することにある。
【課題を解決するための手段】
【0007】
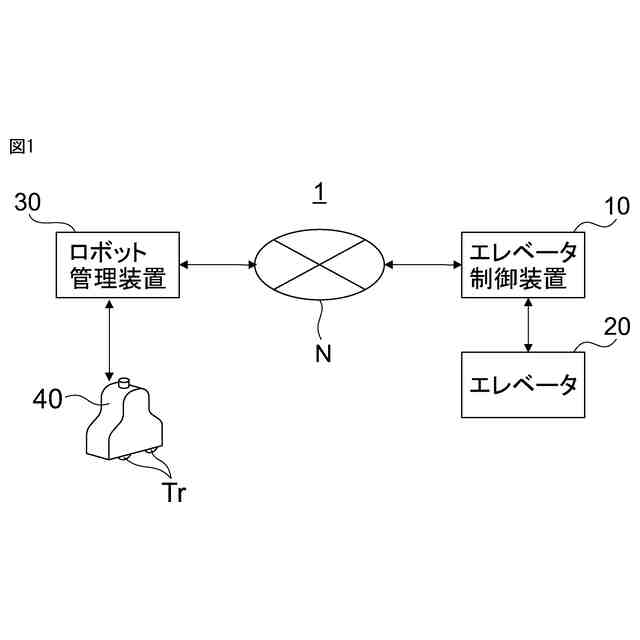
かかる課題を解決するため本発明は、エレベータを利用して複数の階の間を移動可能な自律移動ロボットであって、自律移動ロボットの行先階または乗車階を示す階情報を取得する取得部と、階情報に基づいて、エレベータの乗りかごにおける人物との相乗り乗車に関する乗車方法を決定する決定部と、を有する。
【0008】
この自律移動ロボットにおいて、乗りかごに乗車している人物または乗りかごへの乗車を待機している人物に関する人物情報を取得する第2取得部を有し、決定部は、人物情報に基づいて前記乗車方法を決定する、ことが好適である。
【0009】
この自律移動ロボットにおいて、決定部は、乗車方法として、自律移動ロボットが乗りかごに乗車する乗車タイミング、乗りかご内における自律移動ロボットの乗車位置、自律移動ロボットが乗りかごへの乗車を待機する待機位置のうち少なくとも1つを決定する、ことが好適である。
【0010】
この自律移動ロボットにおいて、決定部は、行先階までの移動階数が所定階数以下である場合、待機中の人物が乗りかごに乗車した後を乗車タイミングに決定する、ことが好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セコム株式会社
自律移動ロボット
1か月前
セコム株式会社
火災監視システム
1か月前
セコム株式会社
表示機能付き認証装置
1か月前
セコム株式会社
業務見守りシステム及びプログラム
2日前
セコム株式会社
データ処理装置及びデータ処理方法
1か月前
セコム株式会社
生活見守りシステム及びプログラム
1か月前
セコム株式会社
業務見守りシステム及びプログラム
2日前
セコム株式会社
生活見守りシステム及びプログラム
1か月前
セコム株式会社
自律移動ロボットおよび制御システム
1か月前
セコム株式会社
自律移動ロボットおよび制御システム
1か月前
セコム株式会社
対話システム、対話方法及びセンタ装置
1か月前
セコム株式会社
センタ装置、対話システム及び対話方法
1か月前
セコム株式会社
端末所持者検知装置及び端末所持者検知方法
1か月前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
1か月前
株式会社デンソーウェーブ
通行管理システム
1か月前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
1か月前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
1か月前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
1か月前
セコム株式会社
自律飛行ロボットの飛行制御システム及び飛行制御方法
1か月前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1か月前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1か月前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1か月前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1か月前
セコム株式会社
データ処理装置、学習データ生成装置、データ処理方法及び学習データ生成方法
1か月前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
1か月前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
1か月前
セコム株式会社
警備システム、携帯端末、プログラム及び警備方法
25日前
セコム株式会社
携帯端末、警備システム、プログラム及び表示方法
2か月前
個人
生産早送り装置
3か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
2か月前
愛知製鋼株式会社
車両用システム
3か月前
株式会社熊谷組
障害物の検出方法
1か月前
ローム株式会社
基準電圧源
2か月前
株式会社FUJI
加工機械ライン
4か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ