TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025150352
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051188
出願日
2024-03-27
発明の名称
飛行ロボットの画像表示装置および画像表示方法
出願人
セコム株式会社
代理人
個人
,
個人
,
個人
主分類
H04N
7/18 20060101AFI20251002BHJP(電気通信技術)
要約
【課題】飛行ロボットで撮影した撮影画像と飛行ロボットの飛行情報とを監視する労力を軽減する。
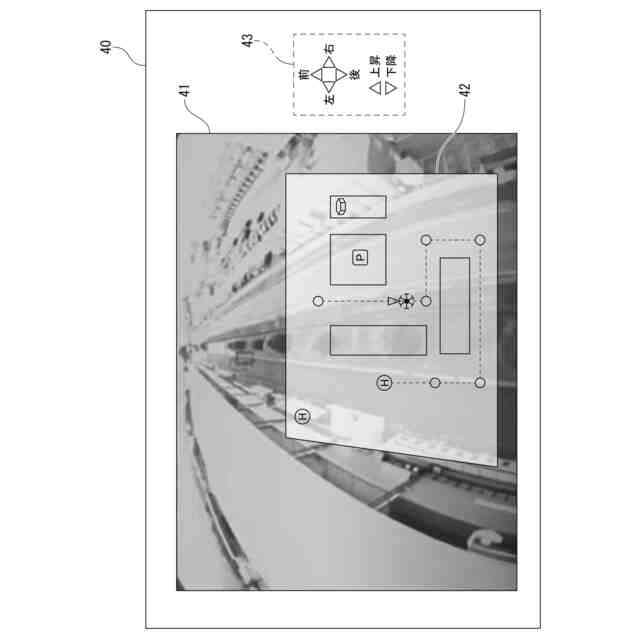
【解決手段】飛行ロボットの画像表示装置は、飛行ロボット1の飛行エリアを含む地図42を記憶する記憶部25と、飛行ロボット1により撮影した撮影画像41及び飛行ロボット1の現在位置の情報を飛行ロボット1から取得する取得部24bと、撮影画像41を表示するとともに、飛行ロボットの現在位置を表示した地図を撮影画像にオーバレイ表示する表示部21と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
飛行ロボットの飛行エリアを含む地図を記憶する記憶部と、
前記飛行ロボットにより撮影した撮影画像及び前記飛行ロボットの現在位置の情報を前記飛行ロボットから取得する取得部と、
前記撮影画像を表示するとともに、前記飛行ロボットの現在位置を表示した前記地図を前記撮影画像にオーバレイ表示する表示部と、
を備えることを特徴とする飛行ロボットの画像表示装置。
続きを表示(約 810 文字)
【請求項2】
前記取得部は、前記撮影画像の監視重要度を取得し、
前記表示部は、前記監視重要度に応じて前記オーバレイ表示における前記地図の表示様態を決定することを特徴とする請求項1に記載の飛行ロボットの画像表示装置。
【請求項3】
前記取得部は、前記飛行ロボットの飛行状態の情報を取得し、
前記表示部は、前記飛行状態に応じて前記オーバレイ表示における前記地図の表示様態を決定することを特徴とする請求項1に記載の飛行ロボットの画像表示装置。
【請求項4】
前記取得部は、前記飛行ロボットの飛行目的を取得し、
前記表示部は、前記飛行目的に応じて前記オーバレイ表示における前記地図の表示様態を決定することを特徴とする請求項1に記載の飛行ロボットの画像表示装置。
【請求項5】
前記撮影画像から物体を検出する物体検出部を備え、
前記表示部は、前記物体検出部による検出結果に応じて前記オーバレイ表示における前記地図の表示様態を決定することを特徴とする請求項1に記載の飛行ロボットの画像表示装置。
【請求項6】
前記表示部は、前記表示様態として、前記地図の透過率、表示位置または表示サイズの少なくとも一つを決定する、請求項2から5のいずれか一項に記載の飛行ロボットの画像表示装置。
【請求項7】
飛行ロボットの飛行エリアを含む地図を記憶する記憶装置から前記地図を読み出す処理と、
前記飛行ロボットにより撮影した撮影画像及び前記飛行ロボットの現在の位置情報を前記飛行ロボットから取得する処理と、
前記撮影画像を表示するとともに、前記飛行ロボットの現在位置を表示した前記地図を前記撮影画像にオーバレイ表示する処理と、
を少なくとも1つのコンピュータに実行させることを特徴とする画像表示方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行ロボットの画像表示装置および画像表示方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
下記特許文献1には、カメラで撮影した画像のサムネール画像を、表示画面上に表示された平面地図イメージの上に添付して表示する表示制御装置が記載されている。サムネール画像の表示位置は、撮影位置に対応する地図上の位置に設定される。
【先行技術文献】
【特許文献】
【0003】
特許第4468794号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
飛行ロボットで撮影した撮影画像や飛行ロボットの飛行位置を監視する場合、これらの情報の表示領域を単一の表示画面に独立して確保すると、個々の表示面積が小さくなって視認性が低下する虞がある。一方でこれらの情報を複数の表示画面に表示すると、一覧性が損なわれてオペレータの負担が増加する虞がある。
本発明は、上記の問題点を鑑みてなされたものであり、飛行ロボットで撮影した撮影画像と飛行ロボットの飛行情報とを監視する労力を軽減することを目的とする。
【課題を解決するための手段】
【0005】
本発明の一形態による飛行ロボットの画像表示装置は、飛行ロボットの飛行エリアを含む地図を記憶する記憶部と、飛行ロボットにより撮影した撮影画像及び飛行ロボットの現在位置の情報を飛行ロボットから取得する取得部と、撮影画像を表示するとともに、飛行ロボットの現在位置を表示した地図を撮影画像にオーバレイ表示する表示部とを備える。
【発明の効果】
【0006】
本発明によれば、飛行ロボットで撮影した撮影画像と飛行ロボットの飛行情報とを監視する労力を軽減できる。
【図面の簡単な説明】
【0007】
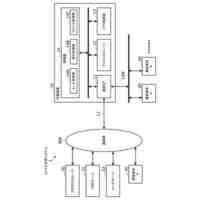
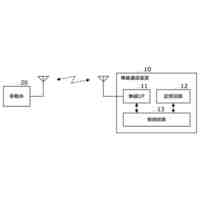
本発明の実施形態の飛行ロボット制御システムの構成の一例を示す概略図である。
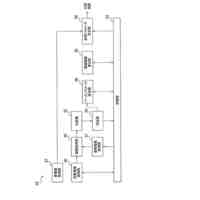
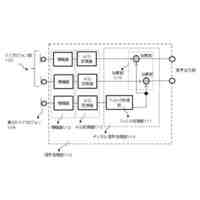
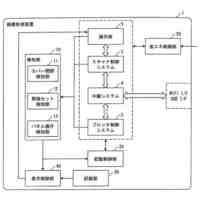
自律飛行ロボットの機能構成の一例のブロック図である。
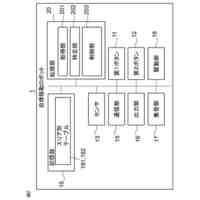
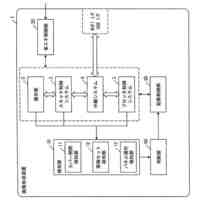
管理装置の機能構成の一例のブロック図である。
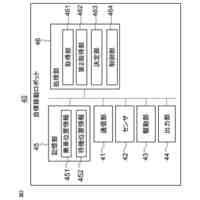
操作端末の機能構成の一例のブロック図である。
操作端末の表示部に表示されるグラフィカルユーザインタフェースの一例の模式図である。
操作端末の表示部に表示される地図画像の一例の模式図である。
(a)及び(b)は、オーバレイ表示の表示様態の第1の変更例の説明図である。
(a)及び(b)は、オーバレイ表示の表示様態の第2の変更例の説明図である。
オーバレイ表示の表示様態の第3の変更例の説明図である。
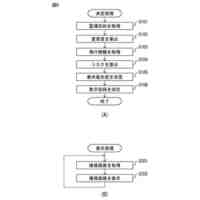
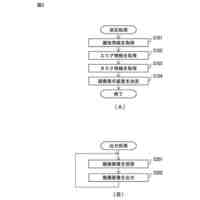
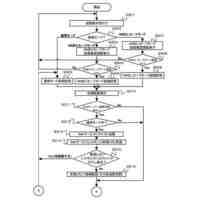
実施形態の画像表示方法のフローチャートである。
【発明を実施するための形態】
【0008】
以下において、図面を参照して本発明の実施形態を説明する。なお、以下に示す本発明の実施形態は、本発明の技術的思想を具体化するための装置や方法を例示するものであって、本発明の技術的思想は、構成部品の構造、配置等を下記のものに特定するものではない。本発明の技術的思想は、特許請求の範囲に記載された請求項が規定する技術的範囲内において、種々の変更を加えることができる。
【0009】
<システム構成>
以下、本発明を適用した飛行ロボット制御システム100の概略構成を示した図1を参照して、本発明の実施の形態の構成を説明する。
(飛行ロボット制御システム100)
飛行ロボット制御システム100は、1台以上の自律飛行ロボット1と、操作端末2と、管理装置3とを有する。例えば、飛行ロボット制御システム100は、予め設定された監視領域における巡回や、監視対象の異常対処や、点検などの幅広い用途に用いられる。
【0010】
自律飛行ロボット1による巡回飛行を行う場合には、自律飛行ロボット1に設けられたセンサ(例えばカメラ)で周囲の状況を検出しながら、例えば管理装置3で設定した飛行経路に沿って自律飛行ロボット1を自律飛行させる。遠隔のオペレータは、自律飛行ロボット1のセンサの検出結果(例えばカメラの撮影画像)に基づいて、監視領域内の状況を確認する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セコム株式会社
自律移動ロボット
1日前
セコム株式会社
火災監視システム
8日前
セコム株式会社
表示機能付き認証装置
1日前
セコム株式会社
生活見守りシステム及びプログラム
1日前
セコム株式会社
生活見守りシステム及びプログラム
1日前
セコム株式会社
データ処理装置及びデータ処理方法
8日前
セコム株式会社
自律移動ロボットおよび制御システム
1日前
セコム株式会社
自律移動ロボットおよび制御システム
1日前
セコム株式会社
対話システム、対話方法及びセンタ装置
9日前
セコム株式会社
センタ装置、対話システム及び対話方法
9日前
セコム株式会社
端末所持者検知装置及び端末所持者検知方法
9日前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
1日前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
1日前
株式会社デンソーウェーブ
通行管理システム
2日前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
2日前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
2日前
セコム株式会社
自律飛行ロボットの飛行制御システム及び飛行制御方法
2日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
1日前
セコム株式会社
データ処理装置、学習データ生成装置、データ処理方法及び学習データ生成方法
4日前
セコム株式会社
携帯端末、警備システム、プログラム及び表示方法
1か月前
個人
店内配信予約システム
2か月前
サクサ株式会社
中継装置
3日前
サクサ株式会社
中継装置
2日前
WHISMR合同会社
収音装置
1か月前
キヤノン株式会社
電子機器
2か月前
アイホン株式会社
電気機器
24日前
キヤノン株式会社
撮像装置
1か月前
キヤノン電子株式会社
画像読取装置
1か月前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
1か月前
サクサ株式会社
無線通信装置
2日前
サクサ株式会社
無線通信装置
2日前
サクサ株式会社
無線システム
1日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ