TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152007
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024053696
出願日
2024-03-28
発明の名称
自律飛行ロボットの飛行制御システム及び飛行制御方法
出願人
セコム株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/686 20240101AFI20251002BHJP(制御;調整)
要約
【課題】自律飛行ロボットとは別個の撮像装置による撮影画像に基づいて指定された追跡対象を自律飛行ロボットに追跡させる場合に、追跡対象に対する誤追跡を抑制する。
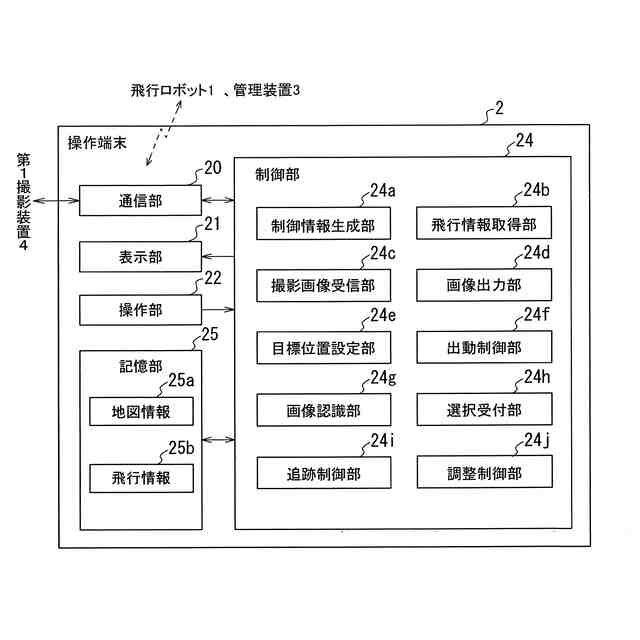
【解決手段】飛行制御システム100は、監視領域に設置された第1撮像装置4が撮影した第1撮影画像又は第1撮像装置4の設置情報に基づいて目標位置を設定する目標位置設定部24eと、目標位置まで自律飛行ロボット1を飛行させる出動制御部24fと、自律飛行ロボット1が備える第2撮像装置11が撮影した第2撮影画像に基づいて追跡候補を認識する画像認識部24gと、目標位置付近において、画像認識部24gが認識した追跡候補の少なくとも一つを追跡対象としてオペレータが選択する選択入力を受け付ける選択受付部24hと、選択された追跡対象を追跡するように自律飛行ロボットに飛行させる第2飛行制御を実行する追跡制御部24iを備える。
【選択図】図5
特許請求の範囲
【請求項1】
自律飛行ロボットの飛行制御システムであって、
監視領域に設置された第1撮像装置が撮影した第1撮影画像または前記第1撮像装置の設置情報に基づいて目標位置を設定する目標位置設定部と、
前記目標位置まで前記自律飛行ロボットを飛行させる第1飛行制御を実行する出動制御部と、
前記自律飛行ロボットが備える第2撮像装置が撮影した第2撮影画像に基づいて追跡候補を認識する画像認識部と、
前記目標位置付近において、前記画像認識部が認識した前記追跡候補の少なくとも一つを追跡対象としてオペレータが選択する選択入力を受け付ける選択受付部と、
選択された前記追跡対象を追跡するように前記自律飛行ロボットに飛行させる第2飛行制御を実行する追跡制御部と、
を備えることを特徴とする飛行制御システム。
続きを表示(約 1,400 文字)
【請求項2】
前記選択受付部は、前記選択入力を受け付ける前記追跡候補として、前記自律飛行ロボットが前記目標位置へ到着する前に前記画像認識部が認識した前記追跡候補を含むことを特徴とする請求項1に記載の飛行制御システム。
【請求項3】
前記選択受付部は、前記選択入力を受け付ける前記追跡候補として、前記目標位置から所定範囲内の位置において前記自律飛行ロボットが撮影した前記第2撮影画像について前記画像認識部が認識した前記追跡候補を含むことを特徴とする請求項1に記載の飛行制御システム。
【請求項4】
前記目標位置設定部は、前記第1撮影画像にて認識した対象物の位置に基づいて前記目標位置を設定し、
前記画像認識部は、前記対象物の種別である第1種別と、前記追跡候補の種別である第2種別と、を認識し、
前記選択受付部は、前記第1種別と等しい前記第2種別の前記追跡候補を選択する前記選択入力を受け付ける、
ことを特徴とする請求項1に記載の飛行制御システム。
【請求項5】
前記第2撮影画像上の前記追跡候補に対して選択可能であることを表すマークを付した監視画像を出力する第1画像出力部を更に備え、
前記選択受付部は、前記マークに対応する前記第2撮影画像上の画像位置に対する前記オペレータの操作を前記選択入力として受け付ける、
ことを特徴とする請求項1に記載の飛行制御システム。
【請求項6】
前記画像認識部は、前記第1撮影画像にて認識した対象物の画像特徴と、前記第2撮影画像にて認識した前記追跡候補の画像特徴と、を比較し、
前記第1画像出力部は、前記画像認識部による比較結果に応じて前記マークの表示様態を設定する、
ことを特徴とする請求項5に記載の飛行制御システム。
【請求項7】
前記目標位置設定部が設定した前記目標位置に前記自律飛行ロボットが到着した後に第2の目標位置を設定して、前記自律飛行ロボットを前記第2の目標位置まで飛行させる調整制御部を更に備え、
前記画像認識部は、前記第1撮影画像にて認識した対象物の画像特徴と、前記第2撮影画像にて認識した複数の前記追跡候補の画像特徴と、を各々比較し、
前記調整制御部は、前記画像認識部による画像特徴の比較結果に応じて前記第2の目標位置を設定する、
ことを特徴とする請求項1に記載の飛行制御システム。
【請求項8】
前記調整制御部は、前記画像特徴が最も類似する前記追跡候補が前記第2撮影画像における画像中央に撮影されるように前記第2の目標位置を設定する、
ことを特徴とする請求項7に記載の飛行制御システム。
【請求項9】
前記追跡制御部は、前記第2飛行制御として、前記追跡対象が前記第2撮影画像における画像中央に撮影されるように前記自律飛行ロボットの飛行を制御することを特徴とする請求項1に記載の飛行制御システム。
【請求項10】
前記第2撮影画像から前記追跡候補の画像領域を切り出した拡大画像を出力する第2画像出力部を更に備えることを特徴とする請求項1~7の何れか一項に記載の飛行制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律飛行ロボットの飛行制御システム及び飛行制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
下記特許文献1には、固定カメラが撮像した映像及び当該固定カメラの位置に基づき、操作者により指定された対象物まで自律飛行ロボットを移動させ、自律飛行ロボットが搭載しているカメラにて撮影させる撮像システムが記載されている。
【先行技術文献】
【特許文献】
【0003】
特許第7437930号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自律飛行ロボットとは別個の撮像装置が撮影した画像に基づいて対象物を指定し、この対象物を自律飛行ロボットに撮影させる場合、自律飛行ロボットが撮影した画像上で複数の類似の物体が検出されると、当初指定された対象物とは異なる物体まで誤って移動する虞がある。特に、指定された対象物を自律飛行ロボットが撮影した画像に基づいて追跡する場合、指定された対象物とは異なる物体を誤って追跡する虞がある。
本発明は、上記の問題点を鑑みてなされたものであり、自律飛行ロボットとは別個の撮像装置による撮影画像に基づいて指定された追跡対象を自律飛行ロボットに追跡させる場合に、追跡対象に対する誤追跡を抑制することを目的とする。
【課題を解決するための手段】
【0005】
本発明の一形態によれば、自律飛行ロボットの飛行制御システムが与えられる。飛行制御システムは、監視領域に設置された第1撮像装置が撮影した第1撮影画像または前記第1撮像装置の設置情報に基づいて目標位置を設定する目標位置設定部と、目標位置まで自律飛行ロボットを飛行させる第1飛行制御を実行する出動制御部と、自律飛行ロボットが備える第2撮像装置が撮影した第2撮影画像に基づいて追跡候補を認識する画像認識部と、前記目標位置付近において、画像認識部が認識した追跡候補の少なくとも一つを追跡対象としてオペレータが選択する選択入力を受け付ける選択受付部と、選択された追跡対象を追跡するように自律飛行ロボットに飛行させる第2飛行制御を実行する追跡制御部と、を備える。
【発明の効果】
【0006】
本発明によれば、自律飛行ロボットとは別個の撮像装置による撮影画像に基づいて指定され追跡対象を自律飛行ロボットに追跡させる場合に、追跡対象に対する誤追跡を抑制できる。
【図面の簡単な説明】
【0007】
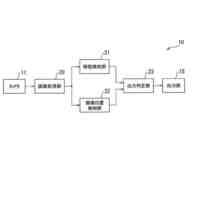
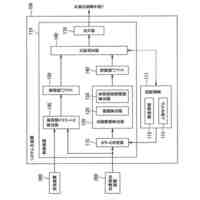
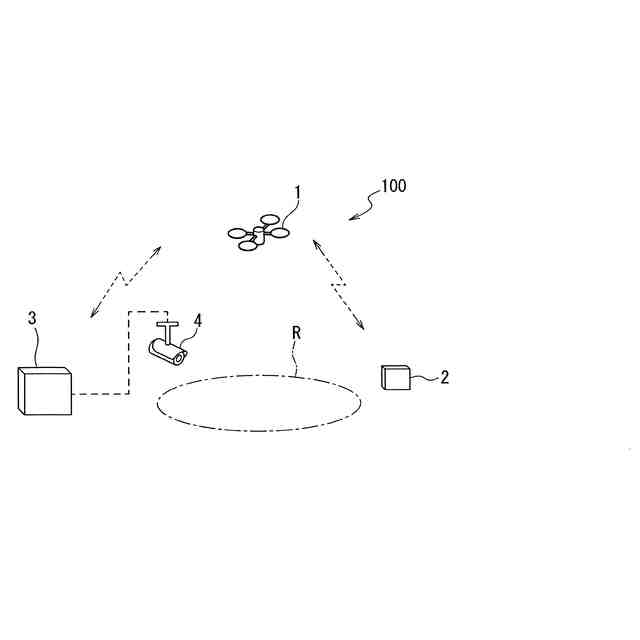
本発明の実施形態の飛行ロボット制御システムの構成の一例を示す概略図である。
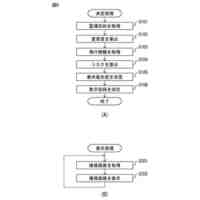
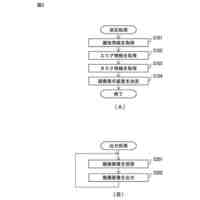
(a)及び(b)は、実施形態の飛行制御方法の一例の説明図である。
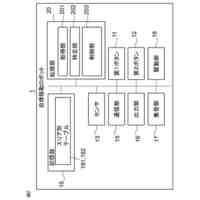
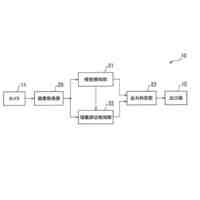
自律飛行ロボットの機能構成の一例のブロック図である。
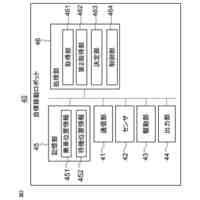
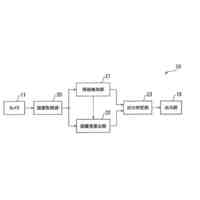
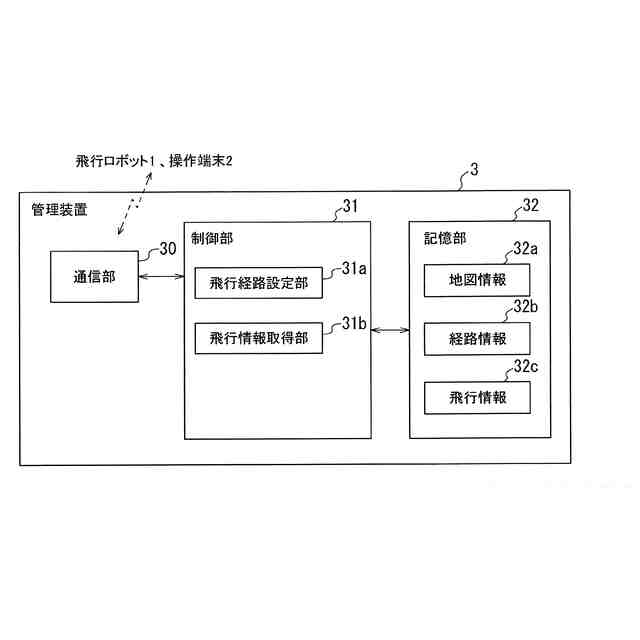
管理装置の機能構成の一例のブロック図である。
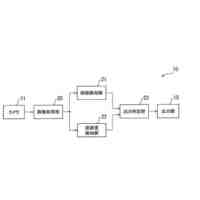
操作端末の機能構成の一例のブロック図である。
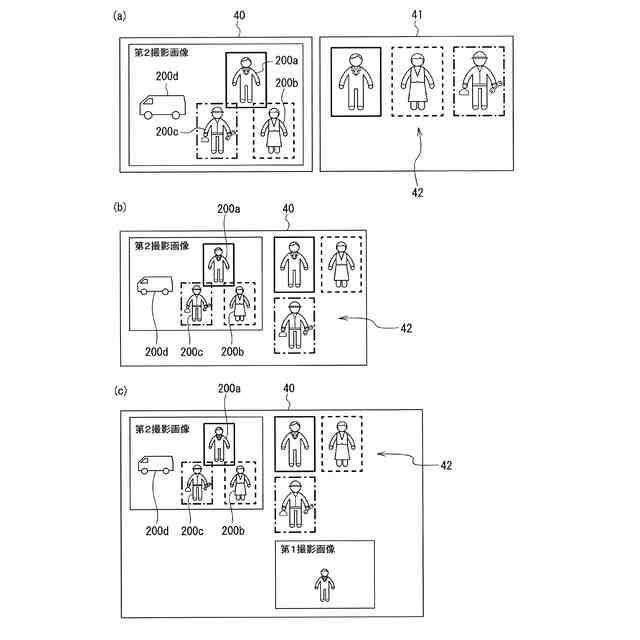
操作端末の表示部に表示される監視画像の第1例の模式図である。
操作端末の表示部に表示される監視画像の第2例の模式図である。
(a)~(c)は、操作端末の表示部に表示される追跡候補の拡大画像の第1例~第3例の模式図である。
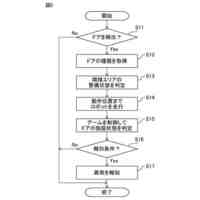
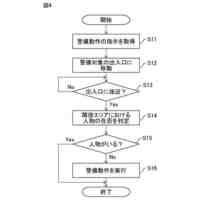
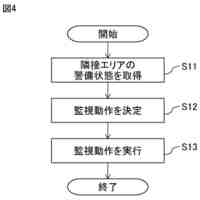
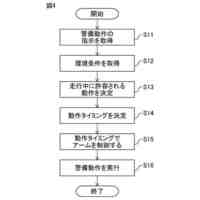
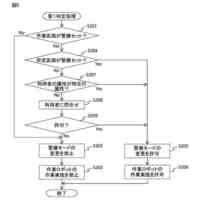
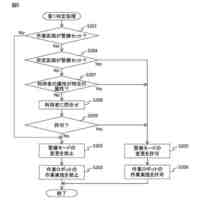
実施形態の飛行制御方法の一例のフローチャートである。
【発明を実施するための形態】
【0008】
以下において、図面を参照して本発明の実施形態を説明する。なお、以下に示す本発明の実施形態は、本発明の技術的思想を具体化するための装置や方法を例示するものであって、本発明の技術的思想は、構成部品の構造、配置等を下記のものに特定するものではない。本発明の技術的思想は、特許請求の範囲に記載された請求項が規定する技術的範囲内において、種々の変更を加えることができる。
【0009】
以下、本発明を適用した飛行ロボット制御システム100の概略構成を示した図1を参照して、本発明の実施の形態の構成を説明する。
(飛行ロボット制御システム100)
飛行ロボット制御システム100は、1台以上の自律飛行ロボット1と、操作端末2と、管理装置3と、予め設定された監視領域Rに設置された固定カメラ4を有する。例えば、飛行ロボット制御システム100は、予め設定された監視領域における巡回や、監視領域における異常対処や、点検などの幅広い用途に用いられる。固定カメラ4は、特許請求の範囲に記載の「第1撮像装置」の一例である。
【0010】
自律飛行ロボット1による巡回飛行を行う場合には、自律飛行ロボット1に設けられたセンサ(例えばカメラ)で周囲の状況を検出しながら、例えば管理装置3で設定した飛行経路に沿って自律飛行ロボット1を自律飛行させる。遠隔のオペレータは、自律飛行ロボット1のセンサの検出結果(例えばカメラの撮影画像)に基づいて、監視領域内の状況を確認する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セコム株式会社
ロボット
1か月前
セコム株式会社
自律走行ロボット
1か月前
セコム株式会社
火災監視システム
9日前
セコム株式会社
巡回警備ロボット
1か月前
セコム株式会社
自律移動ロボット
2日前
セコム株式会社
自律走行ロボット
1か月前
セコム株式会社
自律走行ロボット
1か月前
セコム株式会社
表示機能付き認証装置
2日前
セコム株式会社
警備システム及び警備装置
1か月前
能美防災株式会社
発信装置
2か月前
セコム株式会社
データ処理装置及びデータ処理方法
9日前
セコム株式会社
生活見守りシステム及びプログラム
2日前
セコム株式会社
生活見守りシステム及びプログラム
2日前
セコム株式会社
自律移動ロボットおよび制御システム
2日前
セコム株式会社
自律移動ロボットおよび制御システム
2日前
セコム株式会社
対話システム、対話方法及びセンタ装置
10日前
セコム株式会社
センタ装置、対話システム及び対話方法
10日前
セコム株式会社
画像処理装置及びコンピュータプログラム
2か月前
セコム株式会社
画像処理装置及びコンピュータプログラム
2か月前
セコム株式会社
画像処理装置及びコンピュータプログラム
3か月前
セコム株式会社
画像処理装置及びコンピュータプログラム
3か月前
セコム株式会社
端末所持者検知装置及び端末所持者検知方法
10日前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
2日前
セコム株式会社
飛行ロボットの画像表示装置及び画像表示方法
2日前
株式会社デンソーウェーブ
通行管理システム
3日前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
3日前
セコム株式会社
飛行ロボットの画像表示装置および画像表示方法
3日前
セコム株式会社
警備システム、サーバ、警備装置及び作業ロボット
1か月前
セコム株式会社
警備システム、サーバ、警備装置及び作業ロボット
1か月前
セコム株式会社
警備システム、サーバ、警備装置及び作業ロボット
1か月前
セコム株式会社
警備システム、サーバ、警備装置及び作業ロボット
1か月前
セコム株式会社
自律飛行ロボットの飛行制御システム及び飛行制御方法
3日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
2日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
2日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
2日前
セコム株式会社
飛行ロボットの画像管理装置、画像管理システム及び画像管理方法
2日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ