TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025141183
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024040994
出願日
2024-03-15
発明の名称
車両運転支援装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/08 20120101AFI20250919BHJP(車両一般)
要約
【課題】自動制動制御により自車両が停止された後、当該自動制動制御が停止されたときにアクセルペダル操作量に対応する駆動力を自車両に付加する場合において、運転者に不快感を与えてしまうことを抑制することができる車両運転支援装置を提供する。
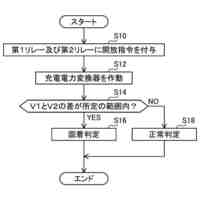
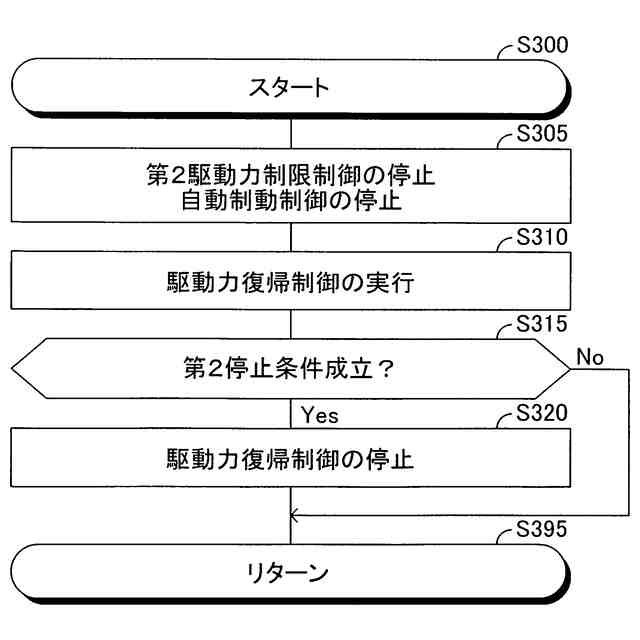
【解決手段】車両運転支援装置10は、自車両100が物標200と衝突する可能性がある場合、付加駆動力を所定駆動力以下に制限する駆動力制限制御を実行するとともに、自車両を自動で制動して自車両が物標と衝突する前に自車両を停止させる自動制動制御を実行する。車両運転支援装置は、自車両を停止させた後、駆動力制限制御及び自動制動制御を停止し、要求駆動力を自車両に付加する。車両運転支援装置は、所定駆動力よりも大きい駆動力を自車両に付加する場合、自車両と物標との間の相対関係に応じて要求駆動力までの付加駆動力の増加のさせ方を変更する駆動力復帰制御を実行する。
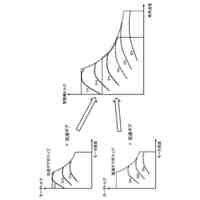
【選択図】 図3
特許請求の範囲
【請求項1】
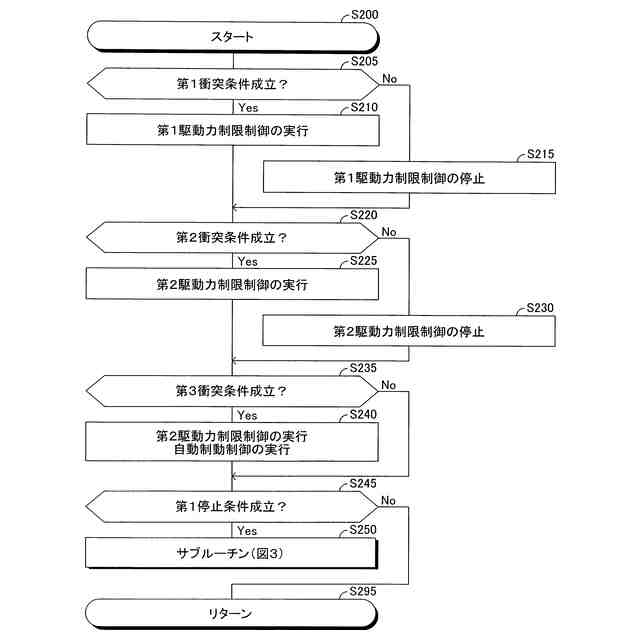
自車両が該自車両の前方の物標と衝突する可能性がある場合、前記自車両に付加される駆動力である付加駆動力を所定駆動力以下に制限する駆動力制限制御を実行するとともに、前記自車両を自動で制動して前記自車両が前記物標と衝突する前に前記自車両を停止させる自動制動制御を実行する制御装置を備え、
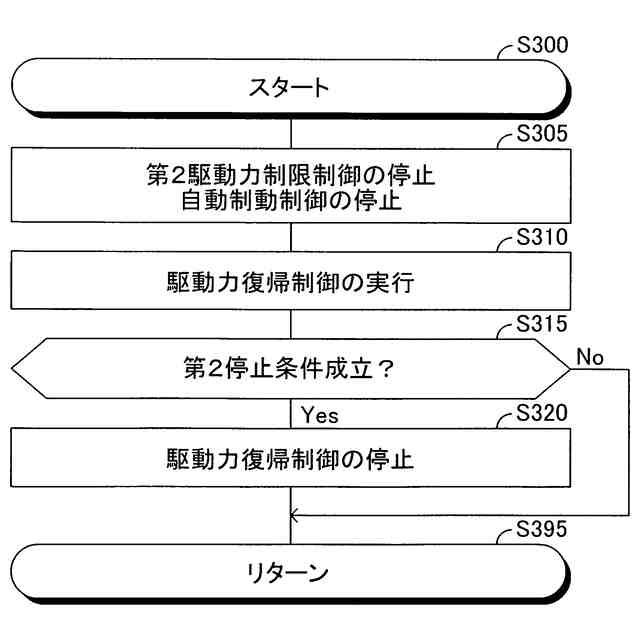
前記制御装置は、前記駆動力制限制御及び前記自動制動制御の実行により前記自車両を停止させた後、所定停止条件が成立した場合、前記駆動力制限制御及び前記自動制動制御を停止し、前記自車両の運転者によるアクセルペダルの操作量に対応する駆動力である要求駆動力を前記自車両に付加するように構成されている、
車両運転支援装置において、
前記制御装置は、前記所定停止条件が成立して前記所定駆動力よりも大きい駆動力を前記自車両に付加する場合、前記自車両と前記物標との間の相対関係に応じて前記要求駆動力までの前記付加駆動力の増加のさせ方を変更する駆動力復帰制御を実行するように構成されている、
車両運転支援装置。
続きを表示(約 320 文字)
【請求項2】
請求項1に記載の車両運転支援装置において、
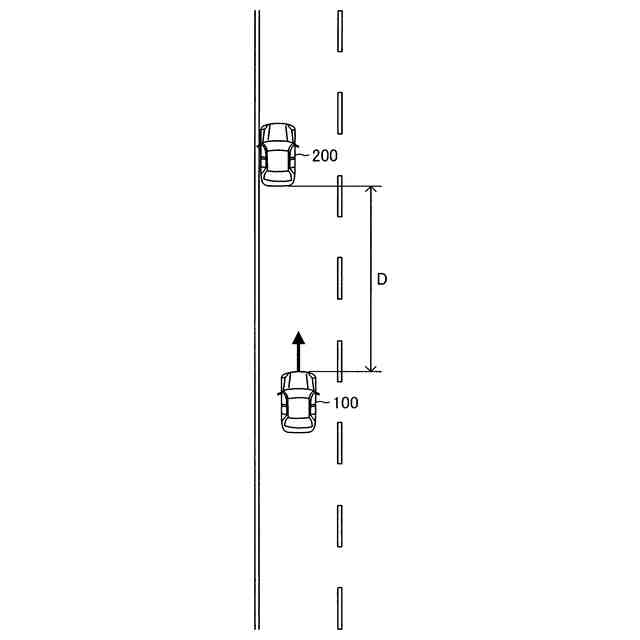
前記相対関係は、前記自車両と前記物標との間の距離であり、
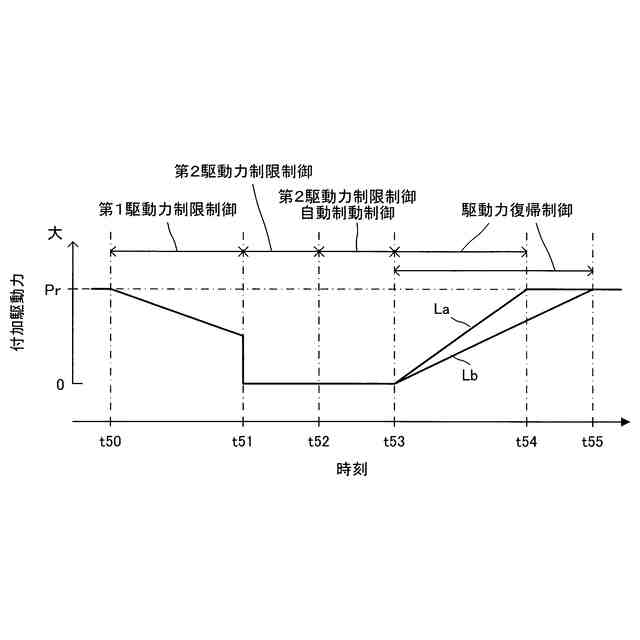
前記制御装置は、前記距離が所定距離以上であるときには、前記距離が前記所定距離未満であるときよりも、前記付加駆動力を増加させるときの当該付加駆動力の勾配を大きくすることにより、前記付加駆動力の増加のさせ方を変更するように構成されている、
車両運転支援装置。
【請求項3】
請求項1又は請求項2に記載の車両運転支援装置において、
前記制御装置は、前記付加駆動力が前記要求駆動力に達した場合、前記駆動力復帰制御を停止するように構成されている、
車両運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両運転支援装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
自車両がその前方の物標と衝突する可能性がある場合、自車両に付加される駆動力を所定駆動力以下に制限する駆動力制限制御を実行するとともに、自車両を自動で制動して自車両が物標と衝突する前に自車両を停止させる自動制動制御を実行する車両運転支援装置が知られている。こうした車両運転支援装置として、駆動力制限制御及び自動制動制御の実行により自車両を停止させた後、所定停止条件が成立した場合、駆動力制限制御及び自動制動制御を停止し、自車両の運転者によるアクセルペダルの操作量に対応する駆動力を自車両に付加する車両運転支援装置も知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-109504号公報
【発明の概要】
【0004】
自動制動制御により自車両が停止された後、当該自動制動制御が停止されたときにアクセルペダルの操作量に対応する駆動力を自車両に付加する場合、自車両と物標との間の相対関係とは無関係に同じように自車両に付加される駆動力を増加させてしまうと、物標が自車両の近くに存在しないにもかかわらず、自車両の加速度が極めて小さく、運転者に不快感を与えてしまう可能性がある。
【0005】
本発明の目的は、自動制動制御により自車両が停止された後、当該自動制動制御が停止されたときにアクセルペダル操作量に対応する駆動力を自車両に付加する場合において、運転者に不快感を与えてしまうことを抑制することができる車両運転支援装置を提供することにある。
【0006】
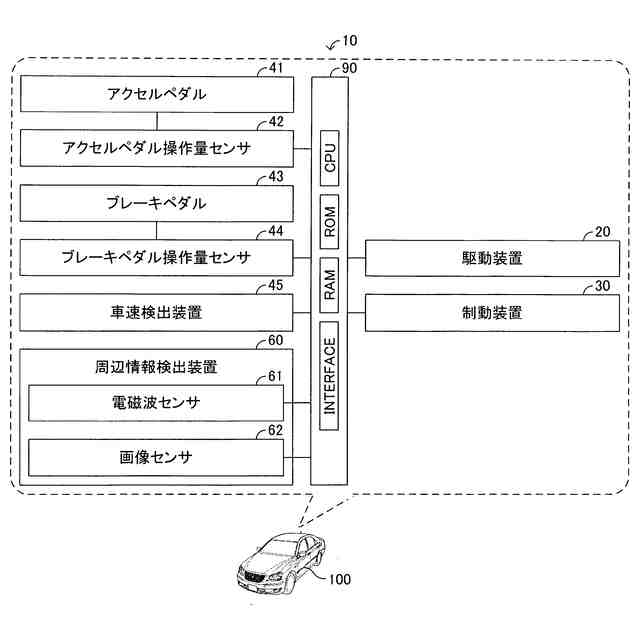
本発明に係る車両運転支援装置は、自車両が該自車両の前方の物標と衝突する可能性がある場合、前記自車両に付加される駆動力である付加駆動力を所定駆動力以下に制限する駆動力制限制御を実行するとともに、前記自車両を自動で制動して前記自車両が前記物標と衝突する前に前記自車両を停止させる自動制動制御を実行する制御装置を備えている。前記制御装置は、前記駆動力制限制御及び前記自動制動制御の実行により前記自車両を停止させた後、所定停止条件が成立した場合、前記駆動力制限制御及び前記自動制動制御を停止し、前記自車両の運転者によるアクセルペダルの操作量に対応する駆動力である要求駆動力を前記自車両に付加するように構成されている。そして、前記制御装置は、前記所定停止条件が成立して前記所定駆動力よりも大きい駆動力を前記自車両に付加する場合、前記自車両と前記物標との間の相対関係に応じて前記要求駆動力までの前記付加駆動力の増加のさせ方を変更する駆動力復帰制御を実行するように構成されている。
【0007】
自動制動制御により自車両が停止された後、当該自動制動制御が停止されたときに要求駆動力を自車両に付加する場合、自車両と物標との間の相対関係とは無関係に同じように付加駆動力を増加させてしまうと、物標が自車両の近くに存在しないにもかかわらず、自車両の加速度が極めて小さく、運転者に不快感を与えてしまう可能性がある。
【0008】
本発明に係る車両運転支援装置によれば、自動制動制御により自車両が停止された後、当該自動制動制御が停止されたときに要求駆動力を自車両に付加する場合、自車両と物標との間の相対関係に応じて要求駆動力までの付加駆動力の増加のさせ方が変更される。このため、運転者に不快感を与えてしまうことを抑制することができる。
【0009】
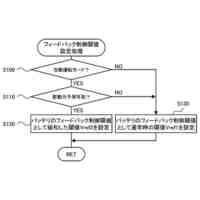
尚、本発明に係る車両運転支援装置において、前記相対関係は、例えば、前記自車両と前記物標との間の距離である。この場合において、前記制御装置は、前記距離が所定距離以上であるときには、前記距離が前記所定距離未満であるときよりも、前記付加駆動力を増加させるときの当該付加駆動力の勾配を大きくすることにより、前記付加駆動力の増加のさせ方を変更するように構成され得る。
【0010】
物標が自車両から離れたところに移動する等して、自車両と物標との間の距離が長くなっているときに、付加駆動力がゆっくりと増加されると、運転者に不快感を与えてしまう可能性がある。本発明に係る車両運転支援装置によれば、物標が自車両から離れたところに移動したときには、付加駆動力がすみやかに増加される。このため、運転者に不快感を与えてしまうことを抑制することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
電動車
3日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
ロータ
3日前
トヨタ自動車株式会社
電解液
1日前
トヨタ自動車株式会社
回転子
1日前
トヨタ自動車株式会社
電源装置
1日前
トヨタ自動車株式会社
蓄電セル
1日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
電動車両
1日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
切断装置
1日前
トヨタ自動車株式会社
駆動装置
1日前
トヨタ自動車株式会社
蓄電セル
3日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
蓄電セル
3日前
トヨタ自動車株式会社
育苗装置
2日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
塗布装置
3日前
トヨタ自動車株式会社
シフト機構
1日前
トヨタ自動車株式会社
電気自動車
1日前
トヨタ自動車株式会社
電気自動車
3日前
トヨタ自動車株式会社
積層構造体
1日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
電極積層体
2日前
トヨタ自動車株式会社
コネクタ構造
1日前
トヨタ自動車株式会社
空間評価装置
1日前
トヨタ自動車株式会社
充電システム
1日前
トヨタ自動車株式会社
駐車支援方法
1日前
トヨタ自動車株式会社
車両診断装置
1日前
トヨタ自動車株式会社
車両制御装置
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ