TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025140762
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024040332
出願日
2024-03-14
発明の名称
車両運転支援装置
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
50/08 20200101AFI20250919BHJP(車両一般)
要約
【課題】自車両全体で消費されるエネルギーの量が少ないほうの運転支援制御を選択して実行することができる車両運転支援装置を提供する。
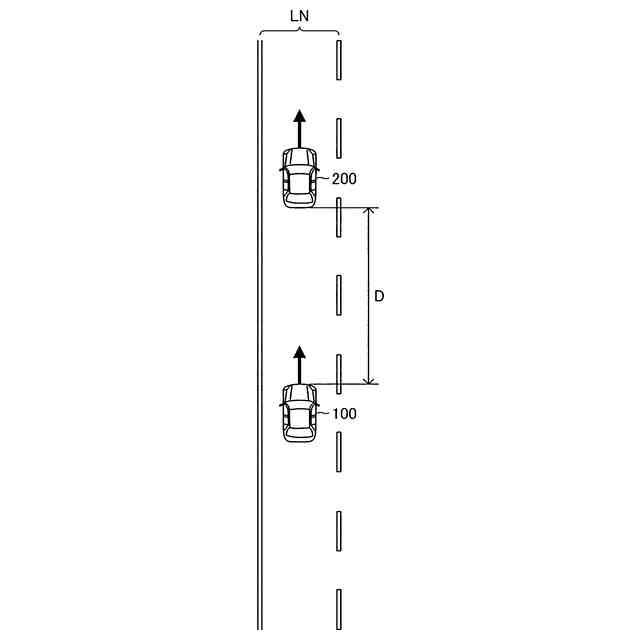
【解決手段】車両運転支援装置10は、第1追従走行制御と第2追従走行制御とを選択的に実行する。車両運転支援装置は、第1追従走行制御及び第2追従走行制御をそれぞれ実行したと仮定した場合の消費エネルギー量を自車両100の空気抵抗並びに自車両が走行する予定の道路の勾配、自車両の重量及び自車両にて消費される電力量との少なくとも1つに基づいて取得し、第1追従走行制御及び第2追従走行制御のうち、消費エネルギー量の少ないほうの制御を実行する。
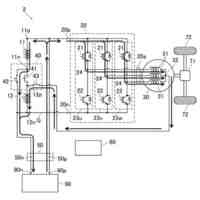
【選択図】 図2
特許請求の範囲
【請求項1】
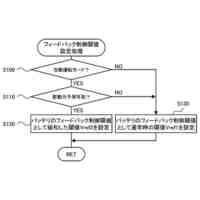
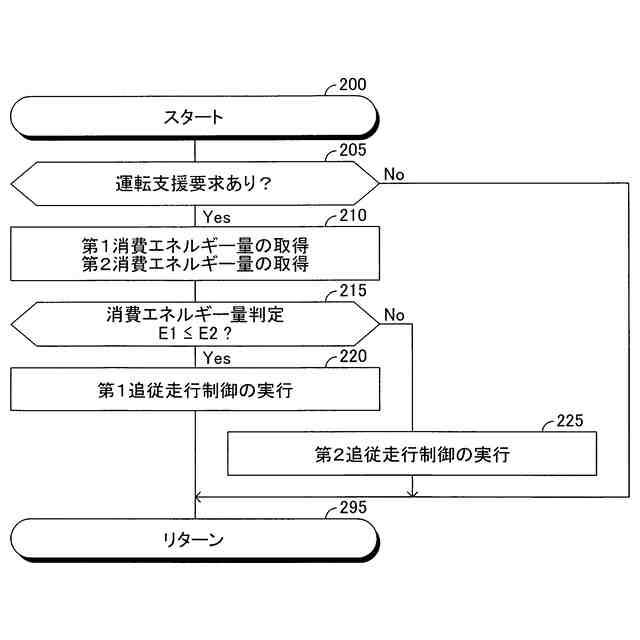
自車両と先行車との間の車間距離が設定車間距離に維持されるように前記自車両を自律的に走行させる第1追従走行制御と、前記車間距離が設定車間距離範囲内で変動することを許容しつつ前記自車両を自律的に走行させる第2追従走行制御とを運転支援制御として選択的に実行する制御装置を備え、
前記制御装置は、
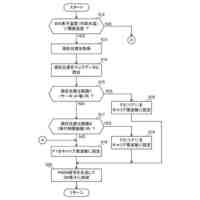
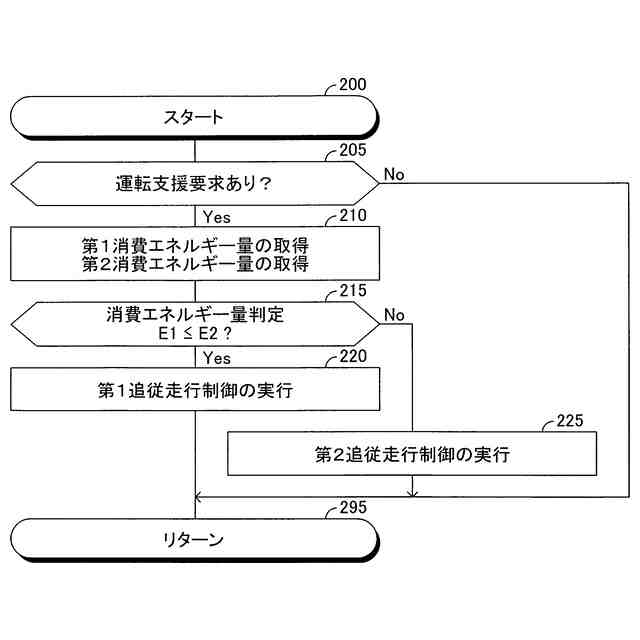
前記運転支援制御の実行が要求された場合、前記第1追従走行制御を実行したと仮定した場合に前記自車両全体で消費されるエネルギーの量を前記自車両の空気抵抗に基づいて第1消費エネルギー量として取得するとともに、前記第2追従走行制御を実行したと仮定した場合に前記自車両全体で消費されるエネルギーの量を前記空気抵抗に基づいて第2消費エネルギー量として取得し、
前記第1消費エネルギー量が前記第2消費エネルギー量以下である場合、前記第1追従走行制御を実行し、
前記第2消費エネルギー量が前記第1消費エネルギー量よりも小さい場合、前記第2追従走行制御を実行する、
ように構成されている、
車両運転支援装置において、
前記制御装置は、前記空気抵抗に加えて、前記自車両が走行する予定の道路の勾配と、前記自車両の重量と、前記自車両にて消費される電力量との少なくとも1つに基づいて前記第1消費エネルギー量及び前記第2消費エネルギー量を取得するように構成されている、
車両運転支援装置。
続きを表示(約 810 文字)
【請求項2】
請求項1に記載の車両運転支援装置において、
前記制御装置は、
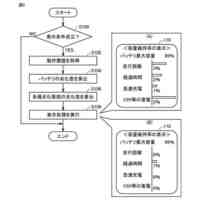
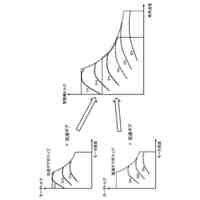
前記先行車の大きさと、前記第1追従走行制御を実行したと仮定した場合の前記自車両の車速の推移と、前記第1追従走行制御を実行したと仮定した場合の前記車間距離の推移とに基づいて前記空気抵抗の推移を第1空気抵抗推移として取得し、
前記勾配と前記重量とに基づいて前記自車両の勾配抵抗の推移を第1勾配抵抗推移として取得し、
前記重量に基づいて前記自車両の転がり抵抗を第1転がり抵抗として取得し、
前記重量と、前記第1追従走行制御を実行したと仮定した場合の前記自車両の加速度の推移とに基づいて前記自車両の加速抵抗の推移を第1加速抵抗推移として取得し、
前記第1空気抵抗推移と、前記第1勾配抵抗推移と、前記第1転がり抵抗と、前記第1加速抵抗推移と、前記電力量とに基づいて前記第1消費エネルギー量を取得し、
前記先行車の大きさと、前記第2追従走行制御を実行したと仮定した場合の前記自車両の車速の推移と、前記第2追従走行制御を実行したと仮定した場合の前記車間距離の推移とに基づいて前記空気抵抗の推移を第2空気抵抗推移として取得し、
前記勾配と前記重量とに基づいて前記自車両の勾配抵抗の推移を第2勾配抵抗推移として取得し、
前記重量に基づいて前記自車両の転がり抵抗を第2転がり抵抗として取得し、
前記重量と、前記第2追従走行制御を実行したと仮定した場合の前記自車両の加速度の推移とに基づいて前記自車両の加速抵抗の推移を第2加速抵抗推移として取得し、
前記第2空気抵抗推移と、前記第2勾配抵抗推移と、前記第2転がり抵抗と、前記第2加速抵抗推移と、前記電力量とに基づいて前記第2消費エネルギー量を取得する、
ように構成されている、
車両運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両運転支援装置に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
自車両と先行車との間の車間距離が設定車間距離に維持されるように自車両を自律的に走行させる第1追従走行制御と、車間距離が設定車間距離範囲内で変動することを許容しつつ自車両を自律的に走行させる第2追従走行制御とを運転支援制御として選択的に実行する車両運転支援装置が知られている。こうした車両運転支援装置として、運転支援制御の実行が要求された場合、第1追従走行制御を実行したと仮定した場合に自車両全体で消費されるエネルギーの量(第1消費エネルギー量)を自車両の空気抵抗に基づいて取得するとともに、第2追従走行制御を実行したと仮定した場合に自車両全体で消費されるエネルギーの量(第2消費エネルギー量)を自車両の空気抵抗に基づいて取得し、第1消費エネルギー量が第2消費エネルギー量以下である場合、第1追従走行制御を実行し、第2消費エネルギー量が第1消費エネルギー量よりも小さい場合、第2追従走行制御を実行する車両運転支援装置も知られている(例えば、特許文献1参照)。これにより、自車両全体で消費されるエネルギーの量が少ないほうの運転支援制御を実行するようになっている。
【先行技術文献】
【特許文献】
【0003】
特開2023-109355号公報
【発明の概要】
【0004】
上述した従来の車両運転支援装置は、自車両の空気抵抗に基づいて第1消費エネルギー量及び第2消費エネルギー量を取得している。しかしながら、自車両全体で消費されるエネルギーの量に影響を与えるパラメータとして、自車両の空気抵抗以外のパラメータも考慮して第1消費エネルギー量及び第2消費エネルギー量を取得したほうが、自車両全体で消費されるエネルギーの量をより正確に取得することができ、その結果、自車両全体で消費されるエネルギーの量が少ないほうの運転支援制御を選択して実行することができる。
【0005】
本発明の目的は、自車両全体で消費されるエネルギーの量が少ないほうの運転支援制御を選択して実行することができる車両運転支援装置を提供することにある。
【0006】
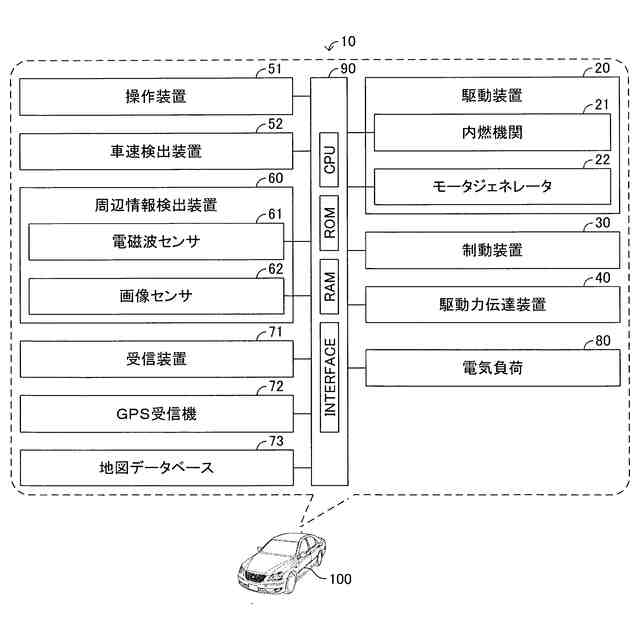
本発明に係る車両運転支援装置は、自車両と先行車との間の車間距離が設定車間距離に維持されるように前記自車両を自律的に走行させる第1追従走行制御と、前記車間距離が設定車間距離範囲内で変動することを許容しつつ前記自車両を自律的に走行させる第2追従走行制御とを運転支援制御として選択的に実行する制御装置を備えている。前記制御装置は、前記運転支援制御の実行が要求された場合、前記第1追従走行制御を実行したと仮定した場合に前記自車両全体で消費されるエネルギーの量を前記自車両の空気抵抗に基づいて第1消費エネルギー量として取得するとともに、前記第2追従走行制御を実行したと仮定した場合に前記自車両全体で消費されるエネルギーの量を前記空気抵抗に基づいて第2消費エネルギー量として取得する。又、前記制御装置は、前記第1消費エネルギー量が前記第2消費エネルギー量以下である場合、前記第1追従走行制御を実行し、前記第2消費エネルギー量が前記第1消費エネルギー量よりも小さい場合、前記第2追従走行制御を実行するように構成されている。そして、前記制御装置は、前記空気抵抗に加えて、前記自車両が走行する予定の道路の勾配と、前記自車両の重量と、前記自車両にて消費される電力量との少なくとも1つに基づいて前記第1消費エネルギー量及び前記第2消費エネルギー量を取得するように構成されている。
【0007】
本発明に係る車両運転支援装置によれば、自車両全体で消費されるエネルギーの量に影響を与えるパラメータとして、自車両の空気抵抗に加えて、自車両が走行する予定の道路の勾配、自車両の重量及び自車両にて消費される電力量の少なくとも1つが用いられて、第1消費エネルギー量及び第2消費エネルギー量が取得される。従って、第1追従走行制御が実行された場合に自車両全体で消費されるエネルギーの量と第2追従走行制御が実行された場合に自車両全体で消費されるエネルギーの量とをより正確に取得することができる。このため、自車両全体で消費されるエネルギーの量が少ないほうの運転支援制御を選択して実行することができる。
【0008】
尚、本発明に係る車両運転支援装置において、前記制御装置は、前記先行車の大きさと、前記第1追従走行制御を実行したと仮定した場合の前記自車両の車速の推移と、前記第1追従走行制御を実行したと仮定した場合の前記車間距離の推移とに基づいて前記空気抵抗の推移を第1空気抵抗推移として取得し、前記勾配と前記重量とに基づいて前記自車両の勾配抵抗の推移を第1勾配抵抗推移として取得し、前記重量に基づいて前記自車両の転がり抵抗を第1転がり抵抗として取得し、前記重量と、前記第1追従走行制御を実行したと仮定した場合の前記自車両の加速度の推移とに基づいて前記自車両の加速抵抗の推移を第1加速抵抗推移として取得し、前記第1空気抵抗推移と、前記第1勾配抵抗推移と、前記第1転がり抵抗と、前記第1加速抵抗推移と、前記電力量とに基づいて前記第1消費エネルギー量を取得するように構成され得る。又、この場合において、前記制御装置は、前記先行車の大きさと、前記第2追従走行制御を実行したと仮定した場合の前記自車両の車速の推移と、前記第2追従走行制御を実行したと仮定した場合の前記車間距離の推移とに基づいて前記空気抵抗の推移を第2空気抵抗推移として取得し、前記勾配と前記重量とに基づいて前記自車両の勾配抵抗の推移を第2勾配抵抗推移として取得し、前記重量に基づいて前記自車両の転がり抵抗を第2転がり抵抗として取得し、前記重量と、前記第2追従走行制御を実行したと仮定した場合の前記自車両の加速度の推移とに基づいて前記自車両の加速抵抗の推移を第2加速抵抗推移として取得し、前記第2空気抵抗推移と、前記第2勾配抵抗推移と、前記第2転がり抵抗と、前記第2加速抵抗推移と、前記電力量とに基づいて前記第2消費エネルギー量を取得するように構成され得る。
【0009】
本発明に係る車両運転支援装置によれば、空気抵抗の推移、勾配抵抗の推移、転がり抵抗、加速度の推移及び電力量に基づいて第1消費エネルギー量及び第2消費エネルギー量が取得される。従って、より正確な第1消費エネルギー量及び第2消費エネルギー量を取得することができる。
【0010】
本発明の構成要素は、図面を参照しつつ後述する本発明の実施形態に限定されるものではない。本発明の他の目的、他の特徴及び付随する利点は、本発明の実施形態についての説明から容易に理解されるであろう。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
ロータ
2日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
回転子
今日
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
電解液
今日
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
蓄電セル
今日
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
切断装置
今日
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
蓄電セル
2日前
トヨタ自動車株式会社
電源装置
今日
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
育苗装置
1日前
トヨタ自動車株式会社
電動車両
今日
トヨタ自動車株式会社
塗布装置
2日前
トヨタ自動車株式会社
蓄電セル
2日前
トヨタ自動車株式会社
検査装置
4日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
電気自動車
2日前
トヨタ自動車株式会社
高圧タンク
4日前
トヨタ自動車株式会社
電池パック
今日
トヨタ自動車株式会社
電極積層体
1日前
トヨタ自動車株式会社
積層構造体
今日
トヨタ自動車株式会社
シフト機構
今日
トヨタ自動車株式会社
電気自動車
今日
トヨタ自動車株式会社
電気自動車
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ