TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025125633
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024021677
出願日
2024-02-16
発明の名称
骨孔作製制御装置、および、骨孔作製制御方法
出願人
国立大学法人愛媛大学
代理人
個人
,
個人
主分類
A61B
34/30 20160101AFI20250821BHJP(医学または獣医学;衛生学)
要約
【課題】 正確に骨孔作製が可能な骨孔作製制御装置を提供する。
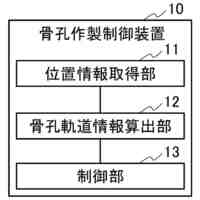
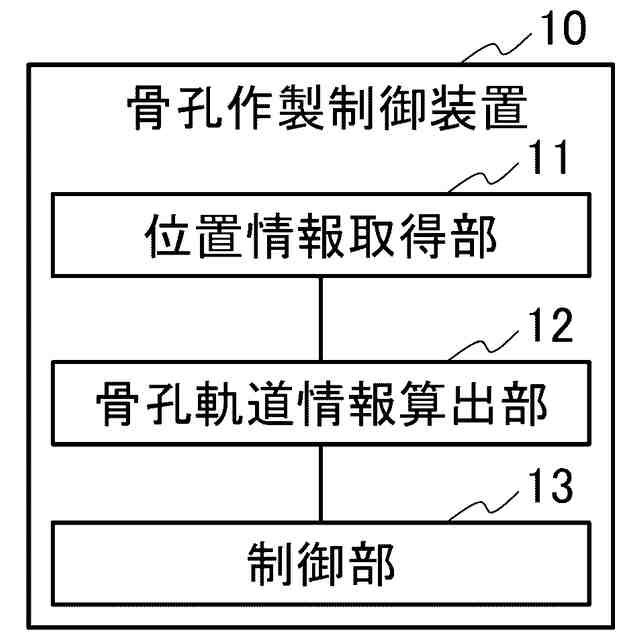
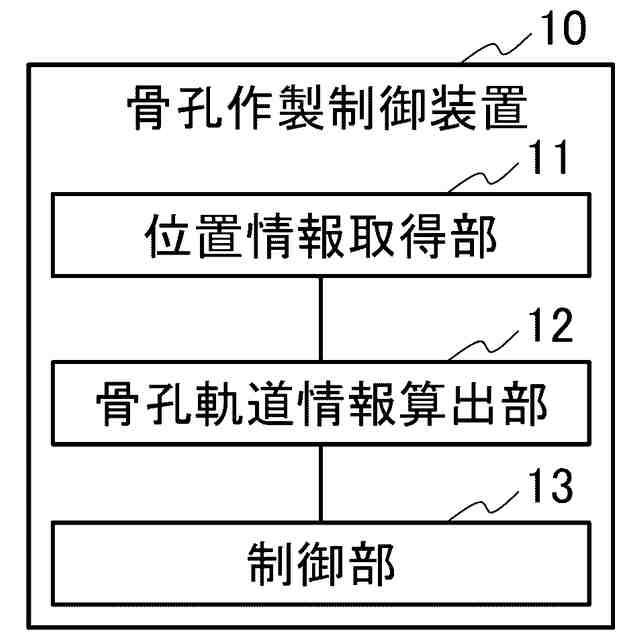
【解決手段】 本開示の骨孔作製制御装置は、位置情報取得部11、骨孔軌道情報算出部12、及び、制御部13を含み、前記位置情報取得部11は、外科手術対象の骨における骨孔軌道を規定するための二つの基準点の位置情報を取得し、前記骨孔軌道情報算出部12は、前記位置情報に基づき、前記骨において、二つの前記基準点を結ぶ直線の骨孔軌道情報を算出し、前記制御部13は、前記骨孔軌道情報に基づき、骨孔作製装置のロボットアームの動きを制御して、前記ロボットアームに取り付けられたドリル装置により、前記骨を穿孔する。
【選択図】 図1
特許請求の範囲
【請求項1】
位置情報取得部、骨孔軌道情報算出部、及び、制御部を含み、
前記位置情報取得部は、外科手術対象の骨における骨孔軌道を規定するための二つの基準点の位置情報を取得し、
前記骨孔軌道情報算出部は、前記位置情報に基づき、前記骨において、二つの前記基準点を結ぶ直線の骨孔軌道情報を算出し、
前記制御部は、前記骨孔軌道情報に基づき、骨孔作製装置のロボットアームの動きを制御して、前記ロボットアームに取り付けられたドリル装置により、前記骨を穿孔する、
骨孔作製制御装置。
続きを表示(約 1,300 文字)
【請求項2】
二つの前記基準点の位置情報は、前記外科手術の術者により、前記ロボットアームに取り付けられたプローブを前記骨の二つの前記基準点に接触させて取得され、二つの前記基準点の位置情報は、前記骨孔作製装置においてロボットアームの位置を規定するための三次元座標において規定される位置情報である、
請求項1記載の骨孔作製制御装置。
【請求項3】
前記骨孔軌道情報算出部において、前記三次元座標において、二つの前記基準点の位置を結ぶ直線軌道を計算して前記骨孔軌道情報を算出する、
請求項2記載の骨孔作製制御装置。
【請求項4】
請求項1に記載の骨孔作製制御装置、及び、骨孔作製装置を含み、
前記骨孔作製装置は、ロボットアームを含み、前記ロボットアームは、骨穿孔ドリル及びプローブが着脱自在に取り付け可能であり、
前記骨孔作製制御装置の制御により、前記骨孔作製装置のロボットアームの動きが制御される、
骨孔作製装置システム。
【請求項5】
位置情報取得工程、骨孔軌道情報算出工程、及び、制御工程を含み、
前記位置情報取得工程は、外科手術対象の骨における骨孔軌道を規定するための二つの基準点の位置情報を取得し、
前記骨孔軌道情報算出工程は、前記位置情報に基づき、前記骨において、二つの前記基準点を結ぶ直線の骨孔軌道情報を算出し、
前記制御工程は、前記骨孔軌道情報に基づき、骨孔作製装置のロボットアームの動きを制御して、前記ロボットアームに取り付けられたドリル装置により、前記骨を穿孔する、
骨孔作製制御方法。
【請求項6】
二つの前記基準点の位置情報は、前記外科手術の術者により、前記ロボットアームに取り付けられたプローブを前記骨の二つの前記基準点に接触させて取得され、二つの前記基準点の位置情報は、前記骨孔作製装置においてロボットアームの位置を規定するための三次元座標において規定される位置情報である、
請求項5記載の骨孔作製制御方法。
【請求項7】
前記骨孔軌道情報算出工程において、前記三次元座標において、二つの前記基準点の位置を結ぶ直線軌道を計算して前記骨孔軌道情報を算出する、
請求項6記載の骨孔作製制御方法。
【請求項8】
請求項5に記載の骨孔作製制御方法、及び、骨孔作製方法を含み、
前記骨孔作製方法は、骨孔作製装置を用いて実施され、
前記骨孔作製装置は、ロボットアームを含み、前記ロボットアームは、骨穿孔ドリル及びプローブが着脱自在に取り付け可能であり、
前記骨孔作製制御方法における制御により、前記骨孔作製装置のロボットアームの動きが制御されて、前記骨孔作製方法が実施される、
骨孔作製方法。
【請求項9】
請求項5から7のいずれか一項に記載の制御方法の各工程を手順としてコンピュータに実行させるプログラム。
【請求項10】
請求項9記載のプログラムを記録したコンピュータが読み取り可能な記録媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、骨孔作製制御装置および骨孔作製制御方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
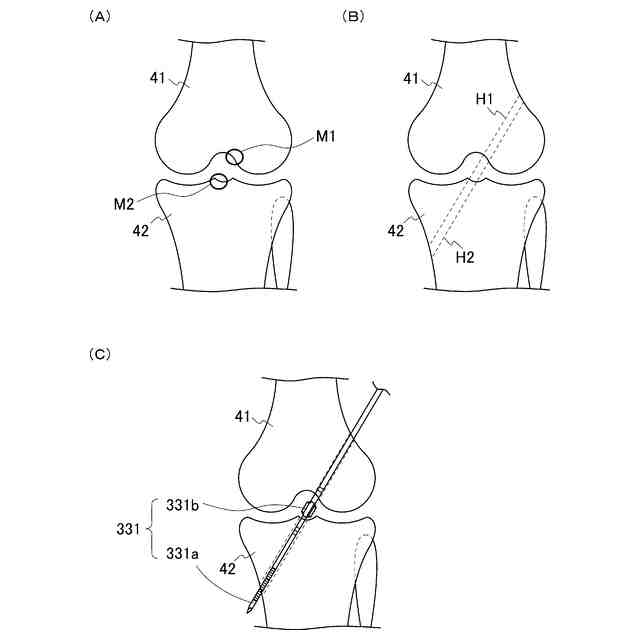
膝前十字靭帯再建術において、最小低侵襲な術式として、all-inside法により骨損傷を限りなく軽減する方法がある。非特許文献1及び非特許文献2には、all-inside法による前十字靭帯再建術の中でも、大腿骨と脛骨の骨孔を同時に作製する器具(ドリルピンとリーマー)を用いた方法が開発され、当該器具を関節内で組み立て、大腿骨・脛骨ともに一期的に直線状に骨孔を作製する方法が開示されている。この術式では、膝関節を屈曲状態で固定し、大腿骨及び脛骨にドリルピンを用いて骨孔を直線的に作製する。その後,膝関節内でドリルピンにリーマーを取り付け、前後に移動させ骨孔を広げる。この方法では移植靭帯と骨孔がしっかりとフィットするために、関節の安定性向上、リハビリテーション期間の短縮等が可能となり、術後の関節安定性及び、臨床成績が良好となる。
【先行技術文献】
【非特許文献】
【0003】
Watanabe S, Takahashi T, Hino K, Kutsuna T, Ohnishi Y, Ishimaru M, Miura H.,Short-term study of the outcome of a new instrument for all-inside double-bundle anterior cruciate ligament reconstruction. Arthroscopy.,2015 Oct,31(10),pp1893-1902
Takahashi T, Watanabe S, Ito T. A surgical technique for anterior cruciate ligament reconstruction using semitendinosus graft: an all-inside transfemoral approach. Arthrosc Tech. 2023 May 29;12(6): e975-e982. doi: 10.1016/j.eats.2023.02.035.
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献1の術式では、低侵襲な二重束再建術を簡便に行うことが可能となったものの、ドリルでの骨孔の製作は手動で行われ、術者の手振れにより目標位置との誤差が生じ、骨孔位置の精度は術者の技量や経験値に依存してしまうという課題があった。この課題は、膝前十字靭帯再建術に限られず、外科手術において骨に骨孔を作成する術式に共通する課題である。
【0005】
そこで、本発明は、正確に骨孔を作成可能な骨孔作製制御装置および骨孔作製制御方法の提供を目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するために、本開示の骨孔作製制御装置は、
位置情報取得部、骨孔軌道情報算出部、及び、制御部を含み、
前記位置情報取得部は、外科手術対象の骨における骨孔軌道を規定するための二つの基準点の位置情報を取得し、
前記骨孔軌道情報算出部は、前記位置情報に基づき、前記骨において、二つの前記基準点を結ぶ直線の骨孔軌道情報を算出し、
前記制御部は、前記骨孔軌道情報に基づき、骨孔作製装置のロボットアームの動きを制御して、前記ロボットアームに取り付けられたドリル装置により、前記骨を穿孔する、
骨孔作製制御装置である。
【0007】
本開示の骨孔作製制御方法は、
位置情報取得工程、骨孔軌道情報算出工程、及び、制御工程を含み、
前記位置情報取得工程は、外科手術対象の骨における骨孔軌道を規定するための二つの基準点の位置情報を取得し、
前記骨孔軌道情報算出工程は、前記位置情報に基づき、前記骨において、二つの前記基準点を結ぶ直線の骨孔軌道情報を算出し、
前記制御工程は、前記骨孔軌道情報に基づき、骨孔作製装置のロボットアームの動きを制御して、前記ロボットアームに取り付けられたドリル装置により、前記骨を穿孔する、
骨孔作製制御方法である。
【発明の効果】
【0008】
本開示によれば、正確に骨孔を作成することができ、このため、例えば、経験が浅い医師であっても、膝関節における骨孔作製が可能となる。
【図面の簡単な説明】
【0009】
図1は、実施形態1の制御装置の一例を示すブロック図である。
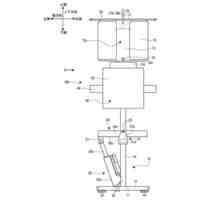
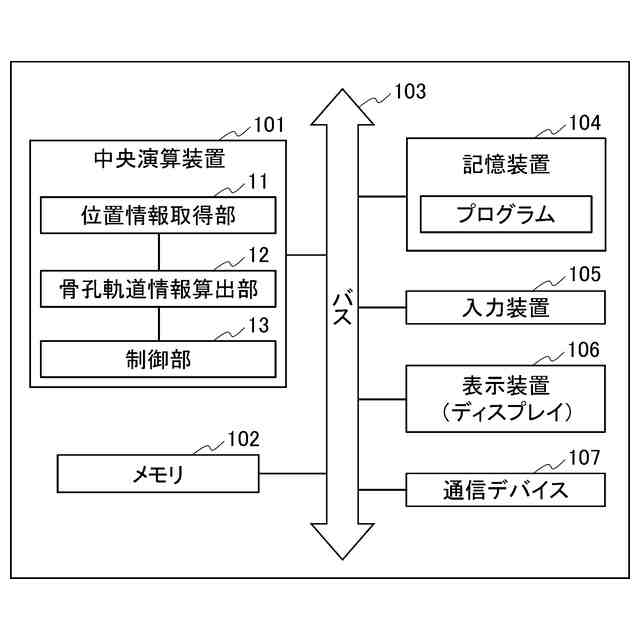
図2は、実施形態1の制御装置のハードウエア構成の一例を示す模式図である。
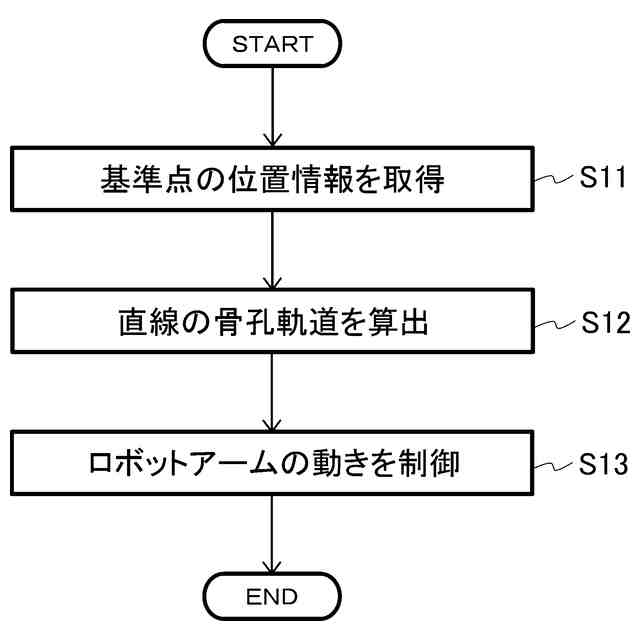
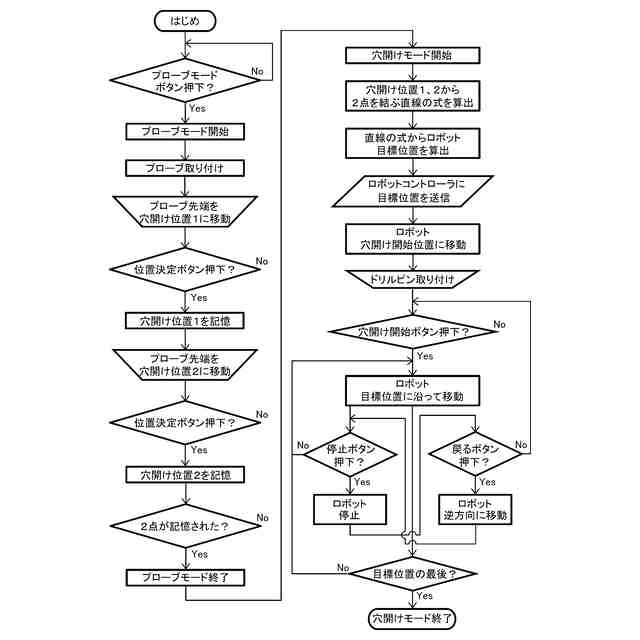
図3は、実施形態1の制御方法の一例を示すフローチャート図である。
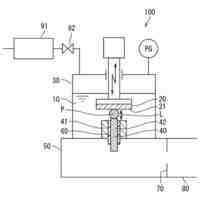
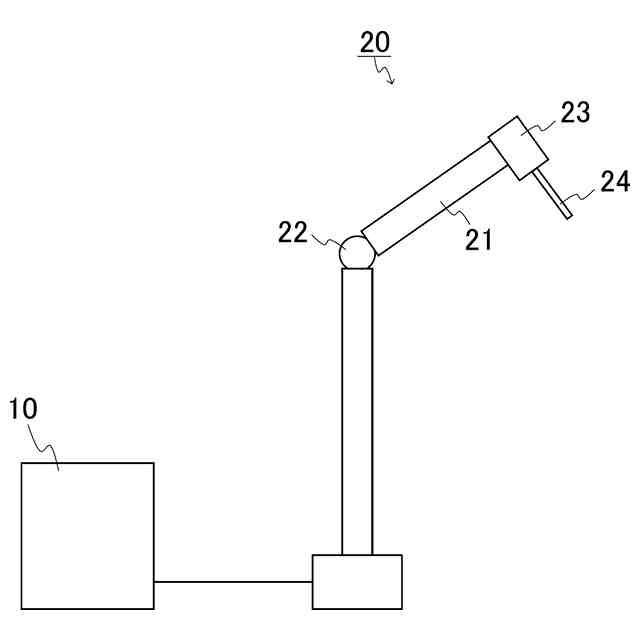
図4は、実施形態2のシステムの一例を示す概略図である。
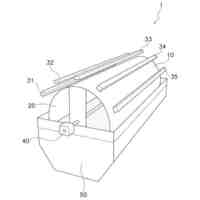
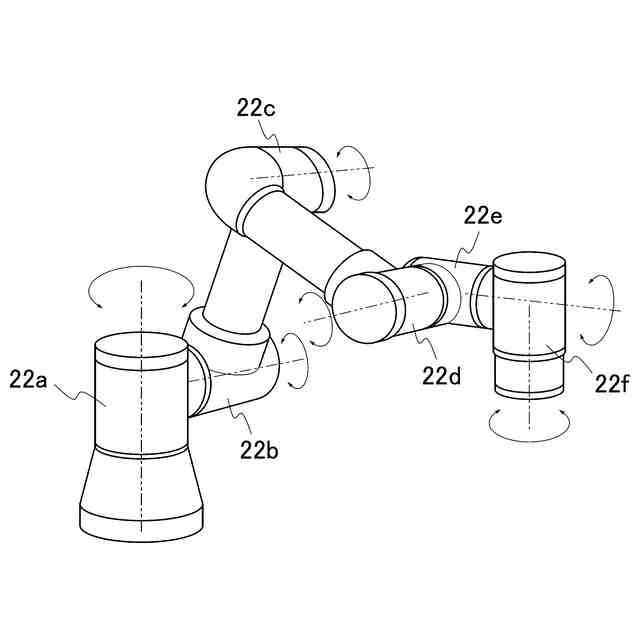
図5は、実施形態2のロボットアームの一例を示す概略図である。
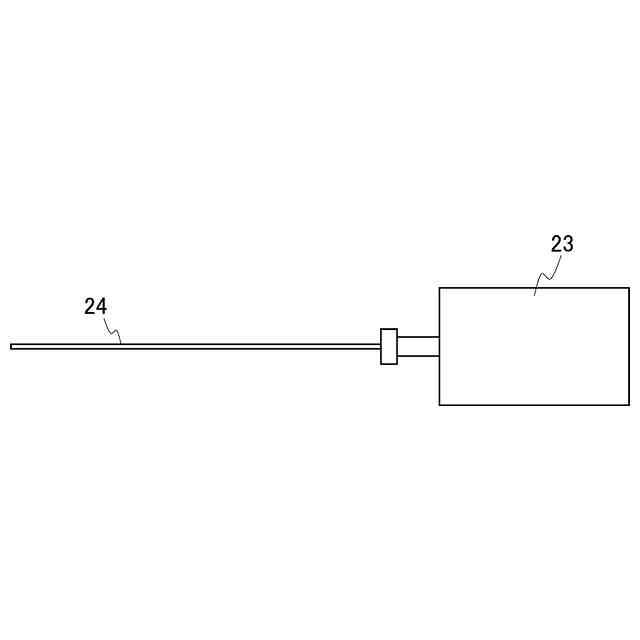
図6は、実施形態2におけるドリル装置の一例を示す概略図である。
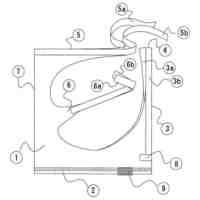
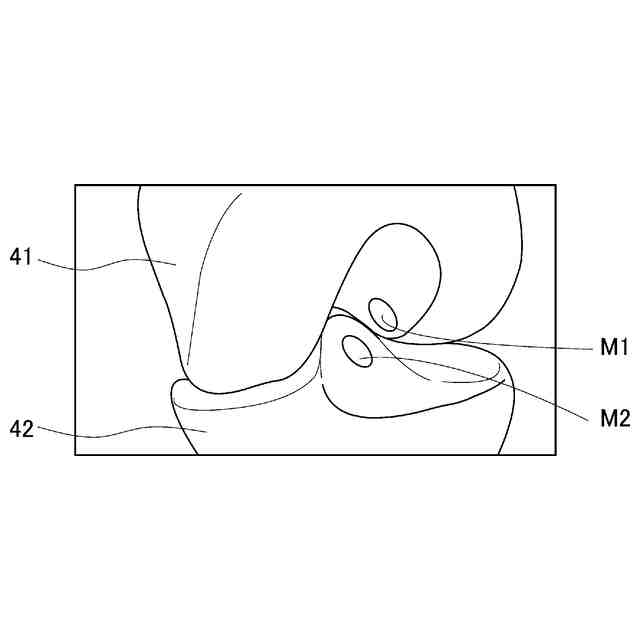
図7は、膝関節において骨孔作製の一例を示す概略図である。
図8は、膝関節において骨孔作製の一例を示す概略図である。
図9は、実施形態3のフローチャートである。
【発明を実施するための形態】
【0010】
本開示の骨孔作製制御装置において、
二つの前記基準点の位置情報は、前記外科手術の術者により、前記ロボットアームに取り付けられたプローブを前記骨の二つの前記基準点に接触させて取得され、二つの前記基準点の位置情報は、前記骨孔作製装置においてロボットアームの位置を規定するための三次元座標において規定される位置情報である、
という態様であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
AGC株式会社
ガラス
4か月前
国立大学法人愛媛大学
カイコガ科に属する昆虫由来の高分子化合物
2か月前
国立大学法人愛媛大学
有機物を含む廃水の処理装置、及び処理方法
2か月前
国立大学法人愛媛大学
骨孔作製制御装置、および、骨孔作製制御方法
3か月前
イトマン株式会社
検査用基材及びその製造方法
2か月前
イトマン株式会社
検査用基材及びその製造方法
2か月前
国立大学法人愛媛大学
プラスチック用添加材、樹脂複合材及びこれらの製造方法
1か月前
国立大学法人愛媛大学
ダイヤモンド膜形成デバイスおよびダイヤモンド膜の形成方法
21日前
株式会社安藤・間
混和材料、セメント組成物、セメント硬化体およびセメント硬化体の製造方法
2か月前
国立大学法人愛媛大学
ダイヤモンド膜等を形成するためのデバイスおよびその形成方法
5か月前
個人
貼付剤
1か月前
個人
簡易担架
14日前
個人
短下肢装具
4か月前
個人
腋臭防止剤
14日前
個人
足踏み器具
21日前
個人
排尿補助器具
1か月前
個人
嚥下鍛錬装置
4か月前
個人
前腕誘導装置
4か月前
個人
腰ベルト
1か月前
個人
アイマスク装置
3か月前
個人
汚れ防止シート
2か月前
個人
バッグ式オムツ
5か月前
個人
胸骨圧迫補助具
2か月前
個人
矯正椅子
6か月前
個人
歯の修復用材料
5か月前
個人
ウォート指圧法
1か月前
個人
陣痛緩和具
4か月前
個人
シャンプー
7か月前
個人
美容セット
23日前
個人
歯の保護用シール
6か月前
個人
哺乳瓶冷まし容器
4か月前
個人
湿布連続貼り機。
3か月前
個人
排尿排便補助器具
16日前
個人
治療用酸化防御装置
2か月前
株式会社大野
骨壷
4か月前
株式会社コーセー
化粧料
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ