TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025121319
公報種別
公開特許公報(A)
公開日
2025-08-19
出願番号
2024016699
出願日
2024-02-06
発明の名称
把持装置
出願人
KiQ Robotics株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
15/08 20060101AFI20250812BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
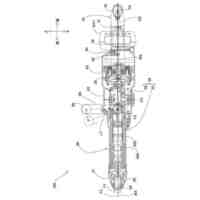
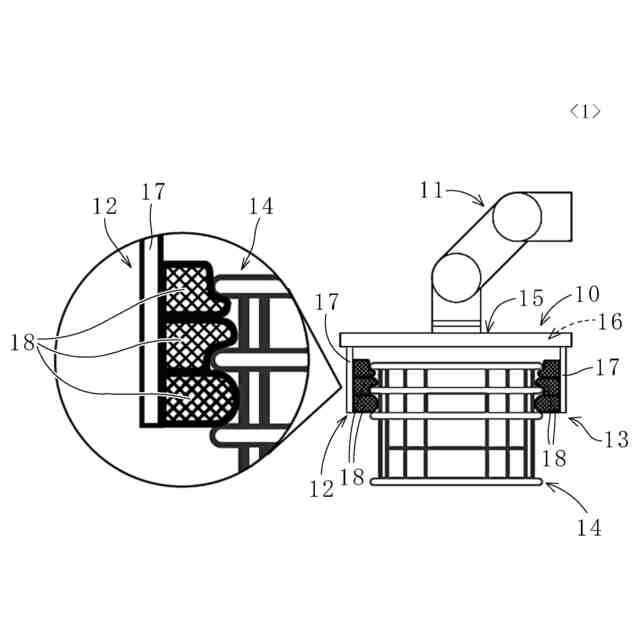
【課題】簡単な構成で、対象物を安定かつ確実に把持可能な把持装置を提供すること。
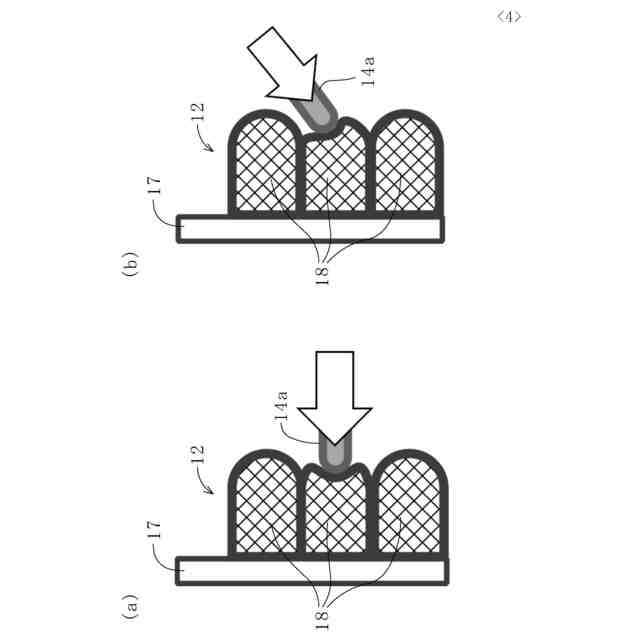
【解決手段】間隔を有して対向する第1、第2の把持部材12、13によって対象物14を把持する把持装置10であり、第1、第2の把持部材12、13の間隔が、位置調整手段16により調整可能となって、第1、第2の把持部材12、13のいずれか一方又は双方が、面状のベース部17と、このベース部17に立設状態で取付け固定され、対象物14に接触可能な複数の押圧部18とを備え、各押圧部18が、ベース部17に縦横に隣接配置され、しかも、第1、第2の把持部材12、13によって対象物14を把持する際に個別に弾性変形可能である。
【選択図】図1
特許請求の範囲
【請求項1】
間隔を有して対向する第1、第2の把持部材によって対象物を把持する把持装置であって、
前記第1、第2の把持部材の間隔が、位置調整手段により調整可能となって、
前記第1、第2の把持部材のいずれか一方又は双方が、面状のベース部と、該ベース部に立設状態で取付け固定され、前記対象物に接触可能な複数の押圧部とを備え、該各押圧部が、前記ベース部に縦横に隣接配置され、しかも、前記第1、第2の把持部材によって前記対象物を把持する際に個別に弾性変形可能であることを特徴とする把持装置。
続きを表示(約 470 文字)
【請求項2】
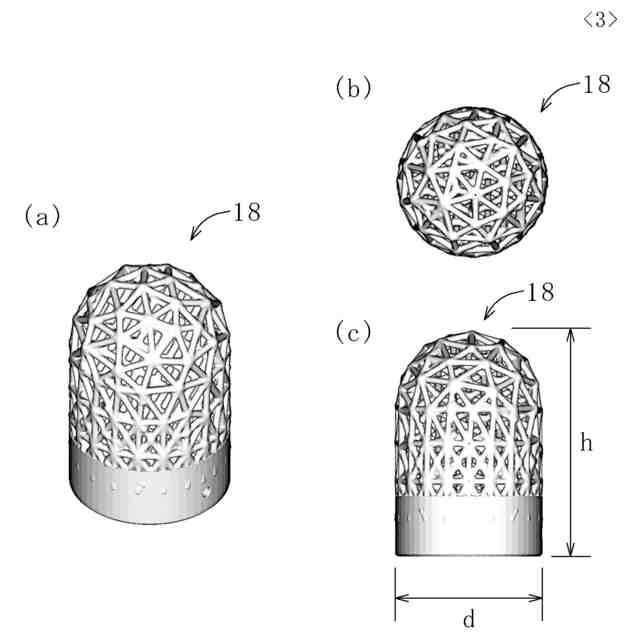
前記押圧部の先端部の形状が、半球状であることを特徴とする請求項1記載の把持装置。
【請求項3】
前記押圧部が、ラティス構造であることを特徴とする請求項1記載の把持装置。
【請求項4】
複数の前記押圧部が、異なる硬さで構成されていることを特徴とする請求項1記載の把持装置。
【請求項5】
前記押圧部が、前記ベース部に取付け取外し可能であることを特徴とする請求項1記載の把持装置。
【請求項6】
前記押圧部が、単一材料で構成されていることを特徴とする請求項1記載の把持装置。
【請求項7】
対となる前記第1、第2の把持部材を複数対有し、該複数対の前記第1、第2の把持部材がそれぞれ、前記対象物を中心としてその周囲から把持可能となるように配置されていることを特徴とする請求項1記載の把持装置。
【請求項8】
前記ベース部は、前記各押圧部の軸心が斜め上方を向くように傾斜配置されていることを特徴とする請求項1記載の把持装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物を把持する把持装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
例えば、物流や産業では、作業の自動化が進められている。
このような作業の自動化においては、間隔を有して対向する第1、第2の把持部材により対象物を挟んで把持する把持装置が使用されている。
【0003】
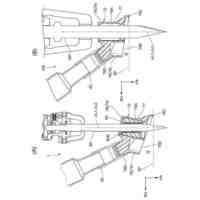
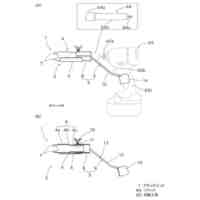
例えば、図8(a)に示す把持装置80は、第1、第2の把持部材81、82の挟む力により対象物83を拘束(力拘束)して把持する装置である(例えば、特許文献1参照)。
しかし、第1、第2の把持部材81、82は、対象物83との接触面が平面状となっているため、例えば、対象物の外表面が曲面の場合、対象物との接触に際し、第1、第2の把持部材81、82が対象物の外表面にならった形状とはならず、線や点で接触する。このため、対象物の形状や重さによっては、対象物を安定かつ確実に把持できない。
また、対象物を安定かつ確実に把持するために、第1の把持部材81と第2の把持部材82の挟む力を強めた場合、対象物の材質によっては破損させるおそれがある。
【0004】
一方、図8(b)に示す把持装置90は、第1、第2の把持部材91、92の挟む力と形態変形により対象物93を拘束(力拘束+形態拘束)して把持する装置である(例えば、特許文献2参照)。
これにより、例えば、対象物の外表面が曲面の場合でも、第1、第2の把持部材91、92の対象物との接触面が対象物の外表面に倣った形状に変形するため、対象物を安定かつ確実に把持できる。
また、対象物を安定かつ確実に把持するために、第1の把持部材91と第2の把持部材92の挟む力を過剰に強める必要もなく、対象物の破損も抑制、更には防止できる。
図8(a)、(b)において、符号100は把持装置80、90を取付けるロボットアームである。
【先行技術文献】
【特許文献】
【0005】
特開2020―28920号公報
特許第6883908号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、把持装置90の第1、第2の把持部材91、92が、力拘束と形態拘束の双方の機能を備えたとしても、対象物に接触した際に、その形状に倣う能力が十分ではないことがあった。
例えば、図8(b)に示すように、対象物93である収納容器(コンテナ)の外周に複数のリブが設けられている場合、対象物93の形状変化が大きく、第1、第2の把持部材91、92が周囲の形状に引っ張られて、隣り合うリブの間まで侵入しづらくなる。
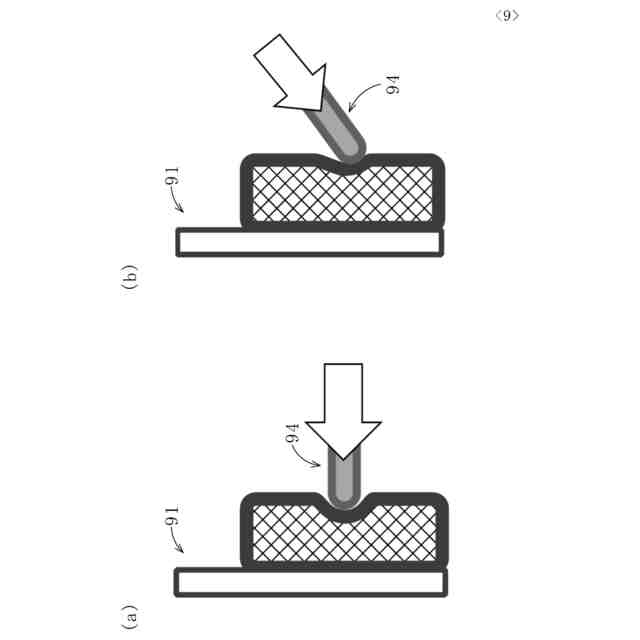
また、図9(a)に示すように、対象物94が棒状で、第1の把持部材91に対し直交する方向から接触する場合、第1の把持部材91が対象物94の形状に倣うように変形しようとするが、図9(b)に示すように、対象物94が第1の把持部材91に対し斜め方向から接触する場合、第1の把持部材91が対象物の形状に倣いづらい(第2の把持部材92も同様)。
このため、第1、第2の把持部材91、92が力拘束と形態拘束の双方の機能を備えた把持装置90を使用しても、対象物を安定かつ確実に把持できないおそれがあった。
【0007】
本発明の課題は、簡単な構成で、対象物を安定かつ確実に把持可能な把持装置を提供することにある。
【課題を解決するための手段】
【0008】
本発明は、以下の通りのものである。
[1] 間隔を有して対向する第1、第2の把持部材によって対象物を把持する把持装置であって、
前記第1、第2の把持部材の間隔が、位置調整手段により調整可能となって、
前記第1、第2の把持部材のいずれか一方又は双方が、面状のベース部と、該ベース部に立設状態で取付け固定され、前記対象物に接触可能な複数の押圧部とを備え、該各押圧部が、前記ベース部に縦横に隣接配置され、しかも、前記第1、第2の把持部材によって前記対象物を把持する際に個別に弾性変形可能であることを特徴とする把持装置。
【0009】
[2] 前記押圧部の先端部の形状が、半球状であることを特徴とする[1]記載の把持装置。
【0010】
[3] 前記押圧部が、ラティス構造であることを特徴とする[1]又は[2]記載の把持装置。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1日前
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
1か月前
トヨタ自動車株式会社
カプラ接続治具
5日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
アピュアン株式会社
衝撃工具
1か月前
ホシデン株式会社
分解用治具
1か月前
積水ハウス株式会社
フィルム除去具
17日前
株式会社マキタ
電気機器
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
株式会社不二越
協働ロボットシステム
22日前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社清水製作所
電動工具の吊下げ具
26日前
株式会社不二越
ロボットシステム
11日前
セイコーエプソン株式会社
ロボット
2か月前
コネクテッドロボティクス株式会社
保持システム
19日前
セイコーエプソン株式会社
ロボット
1日前
株式会社マキタ
打撃工具
22日前
工機ホールディングス株式会社
集塵装置及び作業機
1か月前
川崎重工業株式会社
作業設備
23日前
北越メタル株式会社
鉄筋保持具
22日前
タイガー産業株式会社
アタッチメント
9日前
株式会社マキタ
打撃工具
26日前
住友重機械工業株式会社
減速装置選定支援装置
1か月前
AMATAMA株式会社
制御装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ