TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025120909
公報種別
公開特許公報(A)
公開日
2025-08-18
出願番号
2024140050
出願日
2024-08-21
発明の名称
異常検知装置、プログラム及び異常検知方法
出願人
京セラ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05B
23/02 20060101AFI20250808BHJP(制御;調整)
要約
【課題】要因推定の精度向上が可能な異常検知装置、プログラム及び異常検知方法が提供される。
【解決手段】異常検知装置(10)は、設備に設けられたセンサの検出値を含む検出値データを取得する取得部(11)と、取得された検出値データのうち、正常データを使って生成された学習モデルを用いて、設備の故障予兆があるかを判定する異常検知部(12)と、故障予兆があると判定された場合に、予兆があると判定された故障の要因を推定する要因推定部(13)と、を備え、学習モデルは、疎構造化されたグラフ構造を利用した深層学習モデルであって、要因推定部は、グラフ構造のエッジの重みも用いて、異常の要因と推定されるセンサが上位にあるようにセンサの並び替えを行う要因推定を実行する。
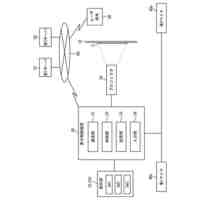
【選択図】図1
特許請求の範囲
【請求項1】
設備に設けられたセンサの検出値を含む検出値データを取得する取得部と、
取得された前記検出値データのうち、正常データを使って生成された学習モデルを用いて、前記設備の故障予兆があるかを判定する異常検知部と、
前記故障予兆があると判定された場合に、予兆があると判定された故障の要因を推定する要因推定部と、を備え、
前記学習モデルは、疎構造化されたグラフ構造を利用した深層学習モデルであって、
前記要因推定部は、前記グラフ構造のエッジの重みも用いて、異常の要因と推定されるセンサが上位にあるようにセンサの並び替えを行う要因推定を実行する、異常検知装置。
続きを表示(約 1,200 文字)
【請求項2】
前記要因推定部は、mを1以上の整数、nをmより大きい2以上の整数として、異常度の大きいセンサ順に、それぞれにつながるエッジの重みが大きいm個ずつについて、エッジの始点又は終点のセンサを探索して、探索されたn個のセンサを探索された順で並べる手法によって、前記要因推定を実行する、請求項1に記載の異常検知装置。
【請求項3】
前記要因推定部は、nを2以上の整数として、各センサについて、それぞれにつながるエッジの重みと、そのエッジの始点又は終点のセンサの異常度と、を乗じた値の総和を求め、前記総和の大きさの順に全てのセンサを並び替えて、上位n個を抽出する手法によって、前記要因推定を実行する、請求項1に記載の異常検知装置。
【請求項4】
前記要因推定部は、nを2以上の整数として、各センサについて、それぞれにつながるエッジの重みと、そのエッジの始点又は終点のセンサの異常度と、を乗じた値の総和の正規化後の大きさ、又は、正規化後の異常度のうち大きい方の値を選択し、選択された前記値の大きさの順に全てのセンサを並び替えて、上位n個を抽出する手法によって、前記要因推定を実行する、請求項1に記載の異常検知装置。
【請求項5】
コンピュータを、
設備に設けられたセンサの検出値を含む検出値データを取得する取得部と、
取得された前記検出値データのうち、正常データを使って生成された学習モデルを用いて、前記設備の故障予兆があるかを判定する異常検知部と、
前記故障予兆があると判定された場合に、予兆があると判定された故障の要因を推定する要因推定部と、して機能させ、
前記学習モデルは、疎構造化されたグラフ構造を利用した深層学習モデルであって、
前記要因推定部は、前記グラフ構造のエッジの重みも用いて、異常の要因と推定されるセンサが上位にあるようにセンサの並び替えを行う要因推定を実行する、プログラム。
【請求項6】
設備に設けられたセンサの検出値を含む検出値データを取得するステップと、
取得された前記検出値データのうち、正常データを使って生成された学習モデルを用いて、前記設備の故障予兆があるかを判定するステップと、
前記故障予兆があると判定された場合に、予兆があると判定された故障の要因を推定するステップと、を備え、
前記学習モデルは、疎構造化されたグラフ構造を利用した深層学習モデルであって、
前記要因を推定するステップは、前記グラフ構造のエッジの重みも用いて、異常の要因と推定されるセンサが上位にあるようにセンサの並び替えを行う要因推定を実行する、異常検知方法。
【請求項7】
前記グラフ構造のエッジの重みを用いる追加情報を、時系列データのグラフ又は統計量のグラフに重ね合わせたデータ表示を行う表示部を、備える、請求項1から4のいずれか一項に記載の異常検知装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、異常検知装置、プログラム及び異常検知方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
デジタル化、少子高齢化等の環境変化に対応した産業保安に関して、スマート保安と呼ばれる取組が行われている。スマート保安で必要となるAI技術として、設備の保全の手法である予知保全が挙げられる。予知保全は、故障前に故障の予兆又は変化を捉え、事前にメンテナンスを行うことで、ダウンタイムの削減及びメンテナンスの効率化を図る。予知保全は、設備に取り付けられたセンサ情報から設備の状態を監視し、そのセンサ情報から設備の故障予兆を事前に把握して保全を行う状態基準保全(Condition Based Maintenance)である。
【0003】
例えば、特許文献1は、時系列データの異常度の検知精度を高めるために、graphical lassoのアルゴリズムにより、相関係数行列から、逆行列である疎の精度行列を作成する手法を開示する。また、近年、GAT(Graph Attention Network)を利用した異常検知手法であるGDN(Graph Deviation Network)が提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2010-078467号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、設備の故障予兆を検知した際に、故障の要因を推定することは効率的な保全作業の実施に役立つ。ここで、故障の要因を推定するために、異常度(実測値と予測値の差分)が大きいセンサ項目を特定する手法が知られているが、要因となるセンサ項目の異常度が大きくなるとは限らない。人手による確認作業を行うと、効率的な保全作業を実施することができない。また、特許文献1の手法は、疎構造学習によって重要な特徴量を抽出できるが、複雑なモデルに対応することが困難である。これに対して、例えばGCN(グラフ畳み込みネットワーク)などのグラフ構造を深層学習にて学習することで、複雑なモデルに対応することが可能になる。しかし、グラフ構造が複雑になるため、要因推定の精度が悪くなることがある。ここで、グラフ構造を深層学習にて学習するとは、グラフ構造を利用する方法を深層学習にて学習することを意味する。
【0006】
また、従来技術として、異常度の大きいデータを表示する手法はあったが、異常度が大きいセンサ項目だけが直接の要因でないケースがある。このようなケースでは、要因の特定に時間を要することが多かった。したがって、要因の特定を容易にするデータ表示の手法も求められている。
【0007】
かかる点に鑑みてなされた本開示の目的は、要因推定の精度向上が可能な異常検知装置、プログラム及び異常検知方法を提供することにある。
【課題を解決するための手段】
【0008】
(1)本開示の一実施形態に係る異常検知装置は、
設備に設けられたセンサの検出値を含む検出値データを取得する取得部と、
取得された前記検出値データのうち、正常データを使って生成された学習モデルを用いて、前記設備の故障予兆があるかを判定する異常検知部と、
前記故障予兆があると判定された場合に、予兆があると判定された故障の要因を推定する要因推定部と、を備え、
前記学習モデルは、疎構造化されたグラフ構造を利用した深層学習モデルであって、
前記要因推定部は、前記グラフ構造のエッジの重みも用いて、異常の要因と推定されるセンサが上位にあるようにセンサの並び替えを行う要因推定を実行する。
【0009】
(2)本開示の一実施形態として、(1)において、
前記要因推定部は、mを1以上の整数、nをmより大きい2以上の整数として、異常度の大きいセンサ順に、それぞれにつながるエッジの重みが大きいm個ずつについて、エッジの始点又は終点のセンサを探索して、探索されたn個のセンサを探索された順で並べる手法によって、前記要因推定を実行する。
【0010】
(3)本開示の一実施形態として、(1)において、
前記要因推定部は、nを2以上の整数として、各センサについて、それぞれにつながるエッジの重みと、そのエッジの始点又は終点のセンサの異常度と、を乗じた値の総和を求め、前記総和の大きさの順に全てのセンサを並び替えて、上位n個を抽出する手法によって、前記要因推定を実行する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
京セラ株式会社
蓄電装置
5日前
京セラ株式会社
二次電池
1か月前
京セラ株式会社
弾性波装置
18日前
京セラ株式会社
粒子分離装置
5日前
京セラ株式会社
センサシステム
11日前
京セラ株式会社
静圧気体軸受装置
4日前
京セラ株式会社
太陽電池モジュール
27日前
京セラ株式会社
配線基板及び電子装置
11日前
京セラ株式会社
配線基板及び電子装置
11日前
京セラ株式会社
走査装置及び制御装置
4日前
京セラ株式会社
走査装置及び制御装置
4日前
京セラ株式会社
コネクタ及び取付方法
6日前
京セラ株式会社
太陽電池付きカーポート
4日前
京セラ株式会社
太陽電池付きカーポート
4日前
京セラ株式会社
発光装置および照明装置
15日前
京セラ株式会社
流路デバイスの準備方法
6日前
京セラ株式会社
受電装置及び光給電システム
6日前
京セラ株式会社
半導体装置及びその製造方法
1か月前
京セラ株式会社
取付部材及びヘッド取付方法
12日前
京セラ株式会社
液体吐出ヘッドおよび記録装置
1か月前
京セラ株式会社
電源制御装置及び電源制御方法
1か月前
京セラ株式会社
電源制御装置及び電源制御方法
1か月前
京セラ株式会社
電源制御装置及び電源制御方法
1か月前
京セラ株式会社
フィルタデバイスおよび通信装置
11日前
京セラ株式会社
光センサおよび光センサの製造方法
今日
京セラ株式会社
揺動装置、電磁波照射装置、及び制御装置
4日前
京セラ株式会社
光通信装置、光通信システム及び光照射素子
7日前
京セラ株式会社
情報処理装置及び学習モデル用データ生成方法
1か月前
京セラ株式会社
ホルダ、切削工具、及び切削加工物の製造方法
5日前
京セラ株式会社
多層基板、フィルタモジュール、および通信装置
15日前
京セラ株式会社
ノード、方法、プログラム及び分散台帳システム
6日前
京セラ株式会社
情報処理装置、情報処理システム、及び情報処理方法
6日前
京セラ株式会社
プログラム、給電方法、給電装置及び光給電システム
5日前
京セラ株式会社
情報処理装置、情報処理システム、及び情報処理方法
6日前
京セラ株式会社
表示システム、表示制御装置及び表示制御プログラム
1か月前
京セラ株式会社
切削インサート、切削工具及び切削加工物の製造方法
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ