TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112779
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024007231
出願日
2024-01-22
発明の名称
作業方法およびロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250725BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】高精度な作業を行うことができる作業方法およびロボットシステムを提供すること。
【解決手段】作業方法は、作業ツール、当接部および力覚センサーを備えるロボットを用いる作業方法であって、前記当接部をガイド部に接触させながら前記作業ツールを移動させる倣い制御によって前記ロボットを駆動し、前記移動中の前記作業ツールに作業を行わせる。また、前記当接部を所定の力で前記ガイド部に押し付けながら前記作業ツールを移動させる。
【選択図】図4
特許請求の範囲
【請求項1】
作業ツール、当接部および力覚センサーを備えるロボットを用いる作業方法であって、
前記当接部をガイド部に接触させながら前記作業ツールを移動させる倣い制御によって前記ロボットを駆動し、前記移動中の前記作業ツールに作業を行わせることを特徴とする作業方法。
続きを表示(約 610 文字)
【請求項2】
前記当接部を所定の力で前記ガイド部に押し付けながら前記作業ツールを移動させる請求項1に記載の作業方法。
【請求項3】
前記ガイド部は、平面である請求項1に記載の作業方法。
【請求項4】
前記ガイド部は、曲面である請求項1に記載の作業方法。
【請求項5】
前記当接部は、棒状である請求項1に記載の作業方法。
【請求項6】
前記当接部の先端を前記ガイド部に接触させる請求項5に記載の作業方法。
【請求項7】
前記当接部の側面を前記ガイド部に接触させる請求項5に記載の作業方法。
【請求項8】
前記作業ツールは、印刷ヘッドであり、
前記当接部を前記ガイド部に接触させながら前記印刷ヘッドを移動させ、前記印刷ヘッドから所定のタイミングでインクを吐出することにより対象物に印刷する請求項1に記載の作業方法。
【請求項9】
作業ツール、当接部および力覚センサーを備えるロボットと、
前記当接部を接触させるガイド部と、
前記ロボットの駆動を制御する制御装置と、を有し、
前記制御装置は、前記当接部を前記ガイド部に接触させながら前記作業ツールを移動させる倣い制御によって前記ロボットを駆動し、前記移動中の前記作業ツールに作業を行わせることを特徴とするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業方法およびロボットシステムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1に記載された印刷システムは、先端に装着された印刷ヘッドを備えたロボットを動かして、対象物に向けてインクを吐出することにより、対象物への印刷を行う。また、印刷システムは、印刷ヘッドの実際の位置を検出するための回転角度センサーと、印刷ヘッドとの間に配置され印刷ヘッドの実際の位置に基づいて印刷ヘッドの位置を補正するピエゾアクチュエーターと、を有する。このように、印刷ヘッドの実際の位置に基づいて印刷ヘッドの位置を補正することにより、ストリップ(隙間)のない印刷を実現している。
【先行技術文献】
【特許文献】
【0003】
特開2013-202781号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、このような構成の印刷システムでは、印刷中に印刷ヘッドの振動やうねりが生じ、印刷品質が低下するおそれがある。
【課題を解決するための手段】
【0005】
本発明の作業方法は、作業ツール、当接部および力覚センサーを備えるロボットを用いる作業方法であって、
前記当接部をガイド部に接触させながら前記作業ツールを移動させる倣い制御によって前記ロボットを駆動し、前記移動中に前記作業ツールに作業を行わせる。
【0006】
本発明のロボットシステムは、作業ツール、当接部および力覚センサーを備えるロボットと、
前記当接部を接触させるガイド部と、
前記ロボットの駆動を制御する制御装置と、を有し、
前記制御装置は、前記当接部を前記ガイド部に接触させながら前記作業ツールを移動させる倣い制御によって前記ロボットを駆動し、前記移動中に前記作業ツールに作業を行わせる。
【図面の簡単な説明】
【0007】
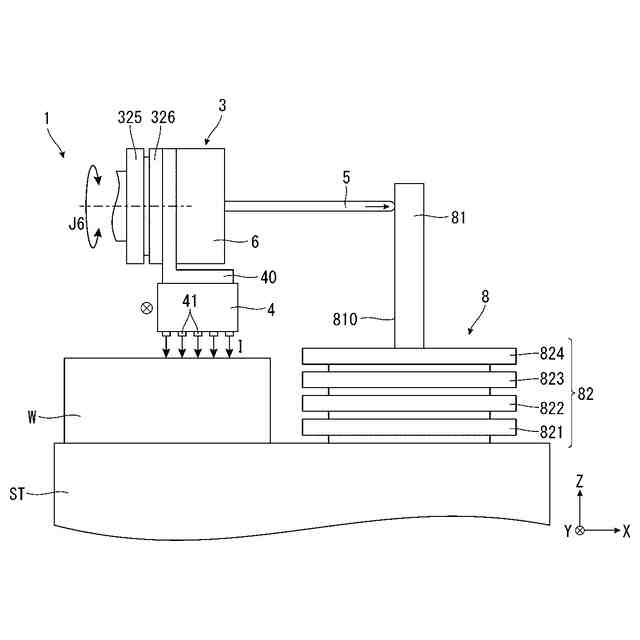
第1実施形態に係るロボットシステムの全体図である。
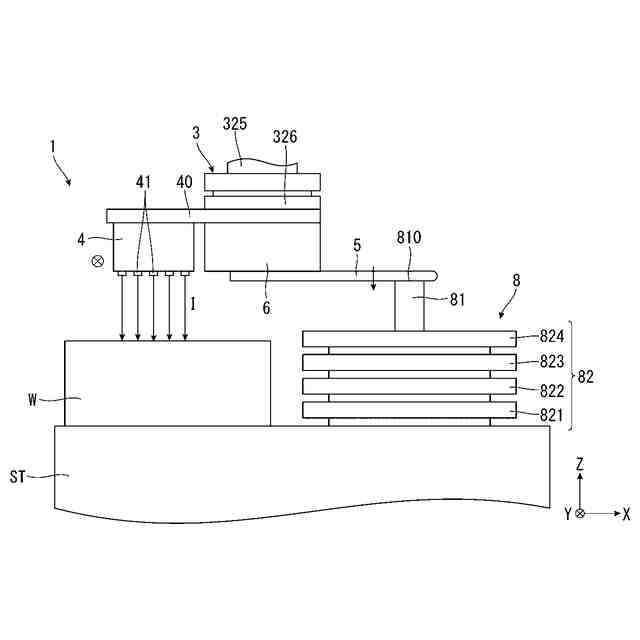
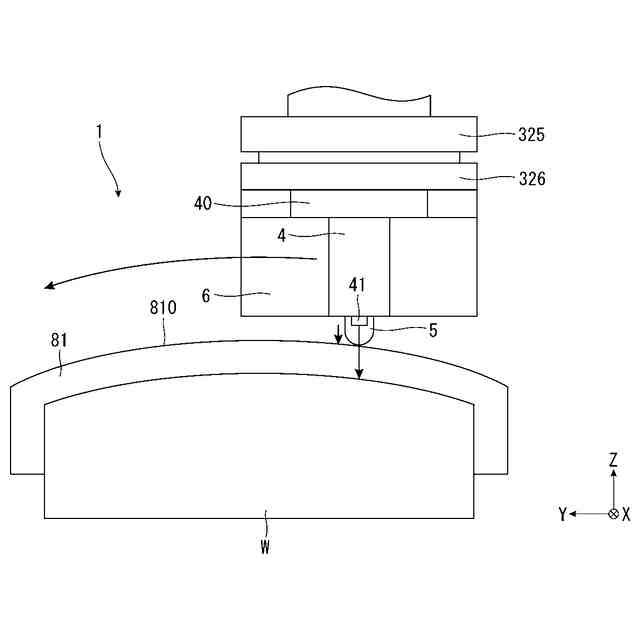
印刷作業の手順を説明するための図である。
印刷作業の手順を説明するための図である。
印刷作業の手順を説明するための図である。
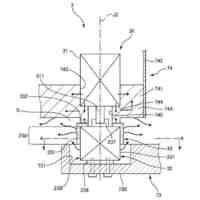
第2実施形態に係るロボットの先端部を示す図である。
第3実施形態に係るロボットの先端部を示す図である。
第4実施形態に係るロボットの先端部を示す図である。
第5実施形態に係るロボットの先端部を示す図である。
ガイド部の変形例を示す図である。
【発明を実施するための形態】
【0008】
以下、本発明の作業方法およびロボットシステムを添付図面に示す実施形態に基づいて詳細に説明する。
【0009】
<第1実施形態>
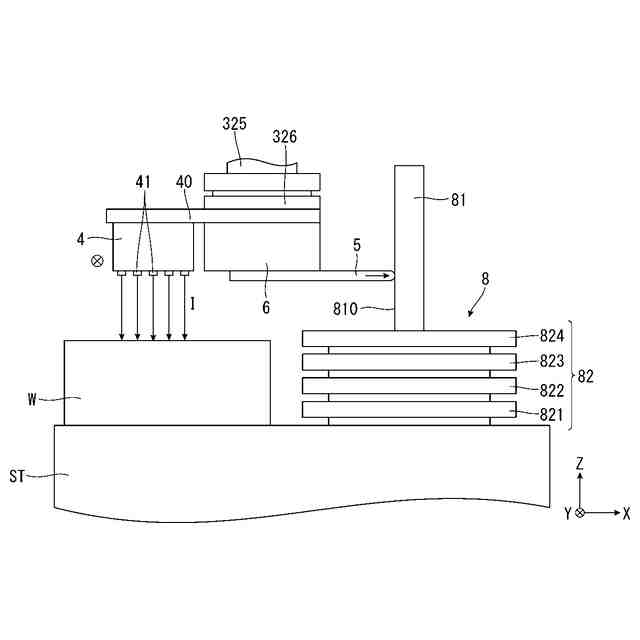
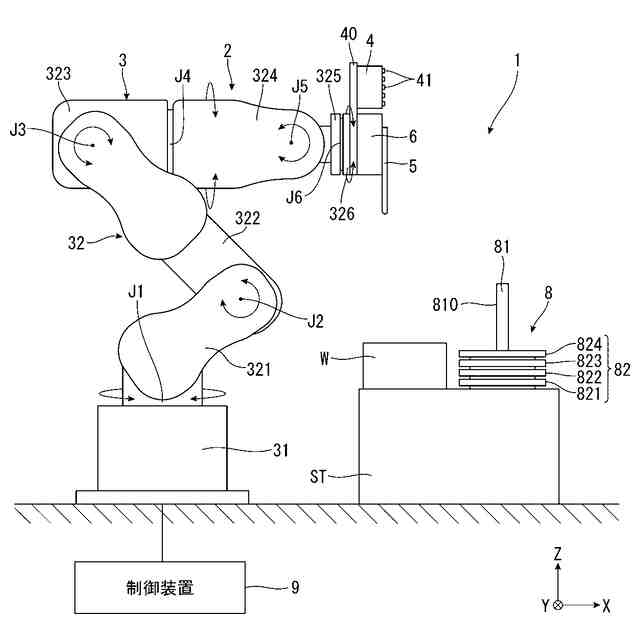
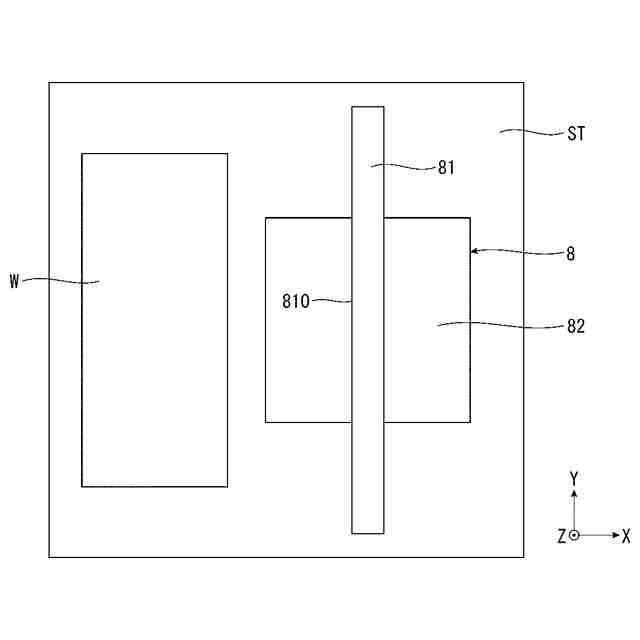
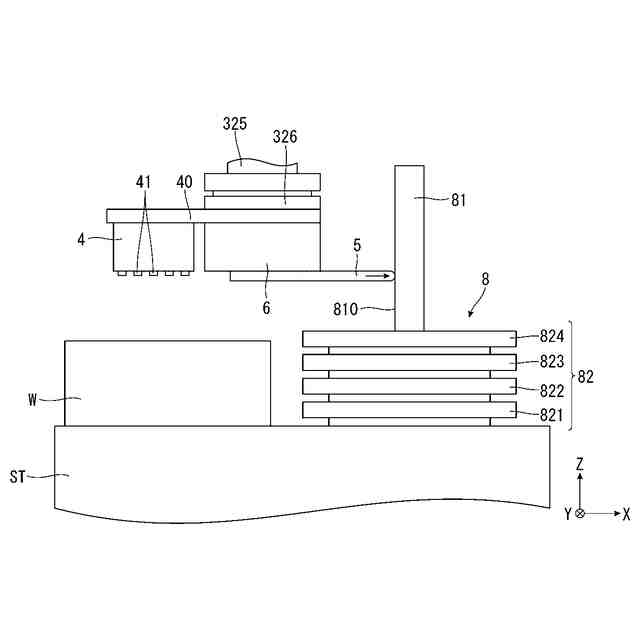
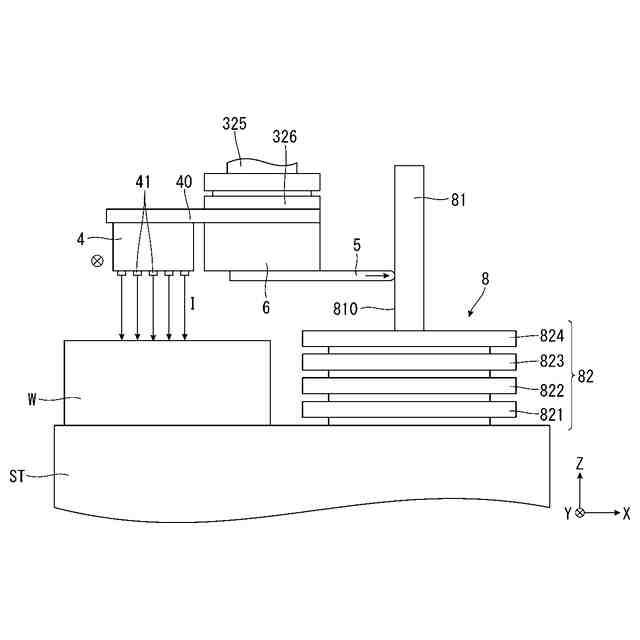
図1は、第1実施形態に係るロボットシステムの全体図である。図2ないし図4は、それぞれ、印刷作業の手順を説明するための図である。なお、各図には、互いに直交する3軸であるX軸、Y軸およびZ軸を図示している。また、以下では、説明の便宜上、X軸に沿う方向をX軸方向とも言い、Y軸に沿う方向をY軸方向とも言い、Z軸に沿う方向をZ軸方向とも言う。
【0010】
図1に示すロボットシステム1は、例えば、対象物Wへの印刷を行う印刷システムに適用される。ロボットシステム1は、対象物Wへの印刷を行うロボット2と、ロボット2の駆動を制御する制御装置9と、ロボット2の動きをガイドするガイド装置8と、を有する。また、ロボット2は、ロボット本体3と、ロボット本体3に配置された作業ツールとしての印刷ヘッド4、当接部5および力覚センサー6と、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
9日前
株式会社ザイテック
吸着装置
2か月前
株式会社ジャノメ
ロボット
1か月前
株式会社不二越
ロボットシステム
3日前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
1か月前
日本精工株式会社
締結用工具
6日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
カプラ接続治具
13日前
ARMA株式会社
ジョイントフレーム
4日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
アピュアン株式会社
衝撃工具
2か月前
積水ハウス株式会社
フィルム除去具
25日前
ホシデン株式会社
分解用治具
1か月前
オークラ輸送機株式会社
ハンド装置
2か月前
株式会社マキタ
電気機器
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
1か月前
株式会社リコー
多関節ロボット
1か月前
ダイハツ工業株式会社
移載治具
4日前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社清水製作所
電動工具の吊下げ具
1か月前
株式会社不二越
ロボットシステム
19日前
セイコーエプソン株式会社
ロボット
9日前
コネクテッドロボティクス株式会社
保持システム
27日前
セイコーエプソン株式会社
ロボット
3日前
セイコーエプソン株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
1か月前
北越メタル株式会社
鉄筋保持具
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ