TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025110229
公報種別
公開特許公報(A)
公開日
2025-07-28
出願番号
2024004043
出願日
2024-01-15
発明の名称
ロボットアームのキャリブレーション方法
出願人
松本機械工業株式会社
代理人
個人
主分類
B25J
9/10 20060101AFI20250718BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】トレイ上の被把持物を把持するロボットアームのキャリブレーション方法に関し、特に精度が高く且つティーチングを行う必要がないキャリブレーション方法を提供する。
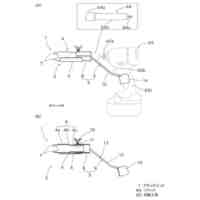
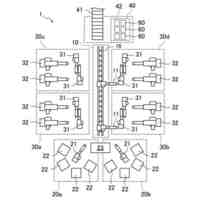
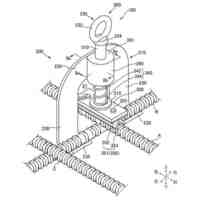
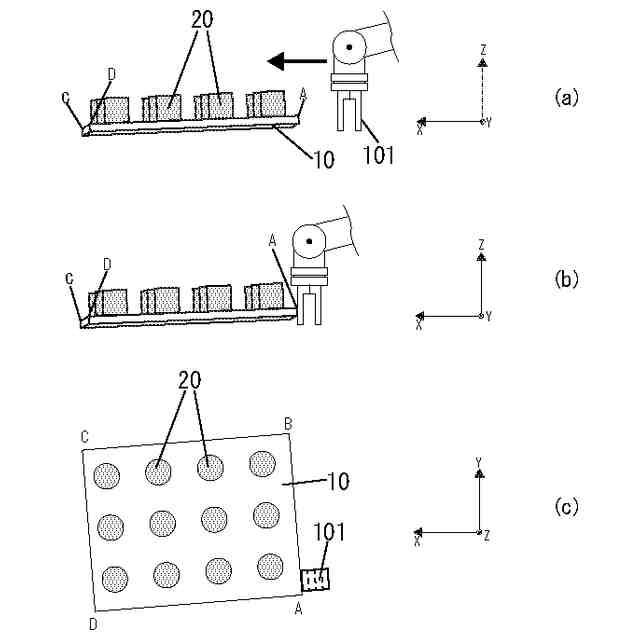
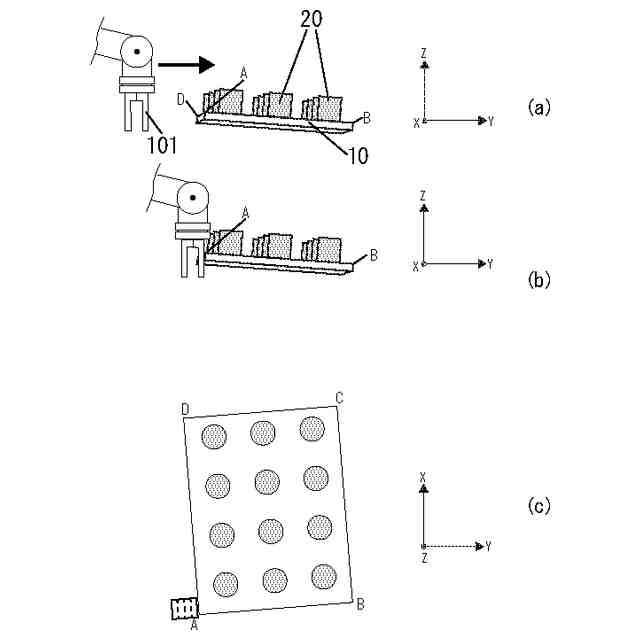
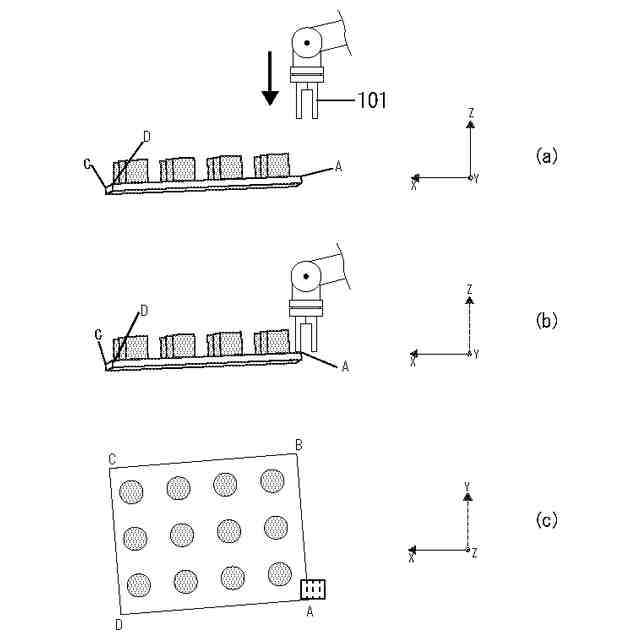
【解決手段】水平面をX-Y平面とする3次元直交座標系(X,Y,Z)において、トレイ10表面の4つの角部A~Dのうち3つの角部A~CのX,Y,Z,W,P,R座標を算出するステップ、3つのうち1つを原点と決めるステップ、3つの角部を含む平面を規定し、この平面をX-Y平面として原点の座標を(X,Y,Z,W,P,R)=(0,0,0,0,0,0)とするユーザ座標を規定するステップ、ユーザ座標の原点座標(X,Y,Z,W,P,R)=(0,0,0,0,0,0)をツール座標の(0,0,0,0,0,0)に設定するステップを備える。トレイ表面が水平面に対して傾斜していても、ロボットハンド101をトレイの傾斜を考慮したツール座標に基づいて動作させられる。
【選択図】図6
特許請求の範囲
【請求項1】
平面視矩形のトレイの表面に配列された被把持物をロボットアーム先端のロボットハンドで把持する際のロボットアームのキャリブレーション方法において、
水平面をX-Y平面とする3次元直交座標系(X,Y,Z)を規定した場合に、
前記トレイの表面の4つの角部のうち3つの前記角部のX,Y,Z,W,P,R座標を算出するステップと、
X,Y,Z,W,P,R座標を算出した3つの前記角部のうち1つの角部を原点と決めるステップと、
X,Y,Z,W,P,R座標を算出した3つの前記角部を含む平面を規定し、この平面をX-Y平面として前記原点の座標を(X,Y,Z,W,P,R)=(0,0,0,0,0,0)とするユーザ座標を規定するステップと、
前記ユーザ座標における前記原点の座標(X,Y,Z,W,P,R)=(0,0,0,0,0,0)をツール座標における(0,0,0,0,0,0)の位置に設定するステップを備えることを特徴とするロボットアームのキャリブレーション方法。
続きを表示(約 190 文字)
【請求項2】
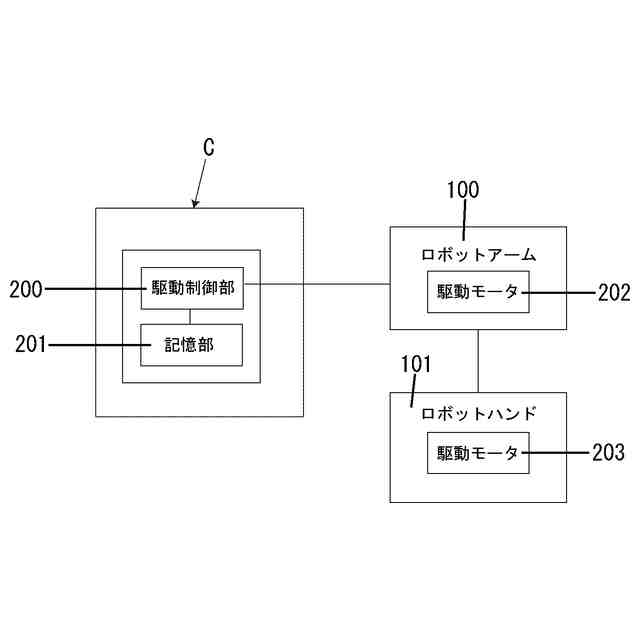
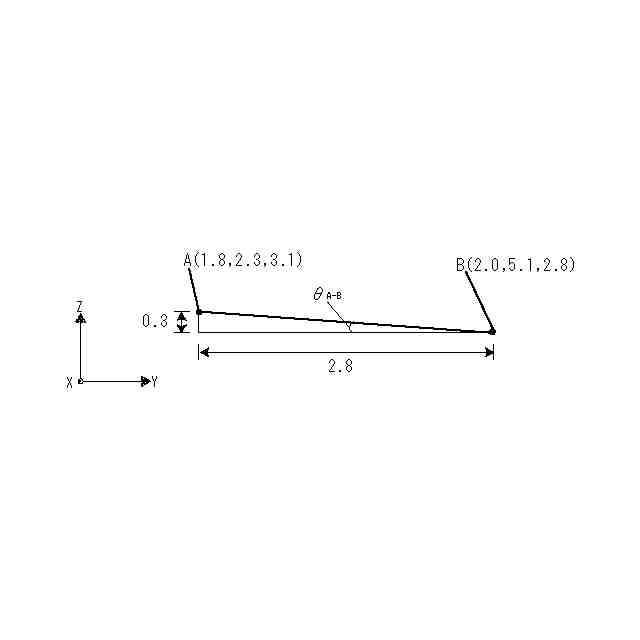
水平面をX-Y平面とする3次元直交座標系(X,Y,Z)を規定した場合に、前記ロボットハンドをX,Y及びZの各方向から前記角部の方向に移動させて、前記ロボットハンドの一部が前記角部に接触することで前記ロボットアームの駆動モータのトルク値が上昇した位置を前記角部のX,Y及びZ座標として算出することを特徴とする請求項1に記載のロボットアームのキャリブレーション方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、トレイ上に配列された被把持物を把持するロボットアームのキャリブレーション方法に関し、特に精度が高く且つティーチングを行う必要がないロボットアームのキャリブレーション方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
トレイ上に配列されたワークや爪等の被把持物をロボットアーム先端のロボットハンドで把持するピッキング動作においては、ロボット制御の基準となるワールド座標、ツール座標等の座標(以下、「ロボット座標」という。)と、トレイ上の各被把持物の位置を示す座標(以下、「ユーザ座標(ワークの座標)」という。)との関係を校正(キャリブレーション)により求めておく必要がある。
例えば特許文献1には固定カメラと、ロボットハンドに取り付けた手先カメラと、ワークが配列されるテーブルに取り付けた複数のマークを備えており、各マークを固定カメラで撮影して得た第1の計測データと、各マークを手先カメラにより撮影した第2の計測データと用いてロボットアームに与える指令値の校正関数を算出する方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2016-52695号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記先行技術のようなロボットハンドに取り付けたカメラでマークを撮影する場合、複数のマークが同一平面上に存在することから3次元で表わされるユーザ座標のキャリブレーション方法としては精度が劣るという問題、カメラによってロボットハンドの動作が制限されるという問題、キャリブレーション用のカメラを用意することで製造コストの上昇を招くという問題がある。
【0005】
また、ロボットアームは先端のツール(ロボットハンド等)を3次元の直交座標の軸(X軸,Y軸,Z軸)に沿って移動させると共に、X,Y,Zの各軸回りに回転させることもできるため、座標はツールの位置情報及び姿勢情報をXYZWPR形式で表現する。ツールの位置姿勢をX,Y,Z,W,P,Rの6つの変数で表わすと使用者はツールの位置姿勢を直感的に理解できないため、ティーチングに時間がかかるという問題もある。
【0006】
本発明は、上記のような問題を考慮して、トレイ上に配列された被把持物を把持するロボットアームのキャリブレーション方法に関し、特に精度が高く且つティーチングを行う必要がないロボットアームのキャリブレーション方法を提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明のロボットアームのキャリブレーション方法は、平面視矩形のトレイの表面に配列された被把持物をロボットアーム先端のロボットハンドで把持する際のロボットアームのキャリブレーション方法において、水平面をX-Y平面とする3次元直交座標(X,Y,Z)を規定した場合に、前記トレイの表面の4つの角部のうち3つの前記角部のX,Y,Z,W,P,R座標を算出するステップと、X,Y,Z,W,P,R座標を算出した3つの前記角部のうち1つの角部を原点と決めるステップと、X,Y,Z,W,P,R座標を算出した3つの前記角部を含む平面を規定し、この平面をX-Y平面として前記原点の座標を(X,Y,Z,W,P,R)=(0,0,0,0,0,0)とするユーザ座標を規定するステップと、前記ユーザ座標における前記原点の座標(X,Y,Z,W,P,R)=(0,0,0,0,0,0)をツール座標における(0,0,0,0,0,0)の位置に設定するステップを備えることを特徴とする。
また、水平面をX-Y平面とする3次元直交座標(X,Y,Z)を規定した場合に、前記ロボットハンドをX,Y及びZの各方向から前記角部の方向に移動させて、前記ロボットハンドの一部が前記角部に接触することで前記ロボットアームの駆動モータのトルク値が上昇した位置を前記角部のX,Y及びZ座標として算出することを特徴とする。
【発明の効果】
【0008】
本発明では平面視矩形状のトレイの4つの角部のうち1つの角部を原点とし、当該原点の角部と他の2つの角部のX,Y,Z,W,P,R座標を算出する。そして、この3つの角部を含む平面を規定し、この平面をX-Y平面として原点の座標を(X,Y,Z,W,P,R)=(0,0,0,0,0,0)とするワーク座標を規定する。そして、この原点の座標(X,Y,Z,W,P,R)=(0,0,0,0,0,0)をツール座標における(0,0,0,0,0,0)の位置に設定する。
【0009】
このように3つの角部のX,Y,Z,W,P,R座標に基づいて原点を(X,Y,Z,W,P,R)=(0,0,0,0,0,0)とするワーク座標を規定し、このワーク座標に合わせてツール座標を設定することにより、トレイの表面が水平面に対して傾斜している場合でも、ロボットハンドをトレイの表面の傾斜を考慮したツール座標に基づいて動作させることができる。つまり、X,Y,Zの各軸回りの姿勢座標W,P,Rを全てゼロとして扱うことが可能になり、使用者はツールの位置姿勢を直感的に理解することが可能になる。これにより使用者はロボットハンドにトレイ上の被把持物をピックアップさせるべく、当該被把持物の位置を入力する際にX,Y,Zの座標を設定するだけで済む。従来必要であったロボットハンドへのティーチングが不要となり、いわゆるティーチングレスのロボットハンドシステムを構築できる。
【0010】
角部のX,Y,Z座標を算出する際にはロボットハンドの一部を角部に接触させて駆動モータのトルク値が上昇した位置を求める方法を採用すればよい。ロボットハンドシステムが備える既存の仕組みを利用できるのでコストを抑えることができる。また、従来のようにロボットハンドに取り付けたカメラでマークを撮影する方法と比較して、本発明ではロボットハンドの一部を角部に接触させるという直接的な手段でX,Y,Z座標を算出するのでキャリブレーションの精度を高めることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
松本機械工業株式会社
ロボットアームのキャリブレーション方法
8日前
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
株式会社ダイヘン
搬送装置
1か月前
住友重機械工業株式会社
教示装置
1か月前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
積水ハウス株式会社
フィルム除去具
10日前
株式会社マキタ
電気機器
1か月前
ホシデン株式会社
分解用治具
1か月前
アピュアン株式会社
衝撃工具
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
15日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
株式会社清水製作所
電動工具の吊下げ具
19日前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社不二越
ロボットシステム
4日前
コネクテッドロボティクス株式会社
保持システム
12日前
セイコーエプソン株式会社
ロボット
1か月前
工機ホールディングス株式会社
集塵装置及び作業機
1か月前
タイガー産業株式会社
アタッチメント
2日前
株式会社マキタ
打撃工具
19日前
株式会社マキタ
電動工具
1か月前
川崎重工業株式会社
作業設備
16日前
北越メタル株式会社
鉄筋保持具
15日前
株式会社マキタ
打撃工具
15日前
日産自動車株式会社
ロックプレートの圧入治具
1か月前
AMATAMA株式会社
制御装置
1か月前
トヨタ自動車株式会社
ピッキングロボット装置
23日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ