TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025107087
公報種別
公開特許公報(A)
公開日
2025-07-17
出願番号
2024000853
出願日
2024-01-05
発明の名称
把持システム及び制御装置
出願人
コネクテッドロボティクス株式会社
代理人
個人
主分類
B25J
13/00 20060101AFI20250710BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】把持または解放する対象物の重量値の精度を向上できる把持システムを提供する。
【解決手段】把持システム1の制御装置50は、2つの第一把持部材100aの間の距離Laを、第一対象物T1を把持または解放する際の開動作時の距離及び閉動作時の距離とは異なる距離に変更する第一距離変更動作、及び、2つの第二把持部材100bの間の距離Lbを、第二対象物T2を把持または解放する際の開動作時の距離及び閉動作時の距離とは異なる距離に変更する第二距離変更動作の少なくとも一方を行う第一制御部51と、2つの第一把持部材100aが把持した第一対象物T1の重量値、及び、解放した第一対象物T1の重量値の少なくとも一方である第一重量値を用いて、2つの第二把持部材100bが把持する第二対象物T2の重量値、及び、解放する第二対象物T2の重量値の少なくとも一方である第二重量値を決定する第二制御部52と、を有する。
【選択図】図7
特許請求の範囲
【請求項1】
第一対象物を把持する2つの第一把持部材を有する第一ロボットと、
第二対象物を把持する2つの第二把持部材を有する第二ロボットと、
前記第一ロボット及び前記第二ロボットの少なくとも一方の動作を制御する制御装置と、を備え、
前記制御装置は、
前記2つの第一把持部材の間の距離を、前記2つの第一把持部材が前記第一対象物を把持または解放する際の開動作時の距離及び閉動作時の距離とは異なる距離に変更する第一距離変更動作、及び、前記2つの第二把持部材の間の距離を、前記2つの第二把持部材が前記第二対象物を把持または解放する際の開動作時の距離及び閉動作時の距離とは異なる距離に変更する第二距離変更動作の少なくとも一方を行う第一制御部と、
前記2つの第一把持部材が把持した前記第一対象物の重量値、及び、前記2つの第一把持部材が解放した前記第一対象物の重量値の少なくとも一方である第一重量値を用いて、前記2つの第二把持部材が把持する前記第二対象物の重量値、及び、前記2つの第二把持部材が解放する前記第二対象物の重量値の少なくとも一方である第二重量値を決定する第二制御部と、を有する
把持システム。
続きを表示(約 1,400 文字)
【請求項2】
前記第一制御部は、前記第一距離変更動作及び前記第二距離変更動作の双方を行う
請求項1に記載の把持システム。
【請求項3】
前記第二制御部は、前記2つの第一把持部材が把持可能な前記第一対象物の重量値が、前記第一対象物の目標重量値よりも小さいと判断した場合に、前記第二重量値を決定する処理を行い、
前記第一制御部は、前記2つの第二把持部材に前記第二重量値の前記第二対象物を把持させる
請求項1または2に記載の把持システム。
【請求項4】
前記第二制御部は、前記2つの第一把持部材が把持可能な前記第一対象物の重量値が、前記第一対象物の目標重量値以上であって、前記第一重量値が前記目標重量値であると判断した場合に、前記第二重量値を決定する処理を行わず、
前記第一制御部は、前記2つの第二把持部材に前記第二対象物を把持させない
請求項3に記載の把持システム。
【請求項5】
前記第二制御部は、前記第一重量値が前記第一対象物の目標重量値よりも大きいと判断した場合に、前記第一重量値から前記目標重量値を差し引いた値を前記第二重量値と決定し、
前記第一制御部は、前記2つの第一把持部材が解放した前記第一対象物を前記第二対象物として、前記2つの第二把持部材に前記第二重量値の当該第二対象物を把持させる
請求項1または2に記載の把持システム。
【請求項6】
前記第一制御部は、前記2つの第一把持部材が前記第一対象物を把持する位置と、前記2つの第二把持部材が前記第二対象物を把持する位置とを離間させる
請求項1または2に記載の把持システム。
【請求項7】
前記第一制御部は、前記2つの第一把持部材が前記第一対象物を解放する位置と、前記2つの第二把持部材が前記第二対象物を解放する位置とを異ならせる
請求項1または2に記載の把持システム。
【請求項8】
前記第一制御部は、前記2つの第一把持部材が前記第一対象物を解放する位置と、前記2つの第二把持部材が前記第二対象物を解放する位置とを一致させる
請求項1または2に記載の把持システム。
【請求項9】
第一対象物を把持する2つの第一把持部材を有する第一ロボット、及び、第二対象物を把持する2つの第二把持部材を有する第二ロボットの少なくとも一方の動作を制御する制御装置であって、
前記2つの第一把持部材の間の距離を、前記2つの第一把持部材が前記第一対象物を把持または解放する際の開動作時の距離及び閉動作時の距離とは異なる距離に変更する第一距離変更動作、及び、前記2つの第二把持部材の間の距離を、前記2つの第二把持部材が前記第二対象物を把持または解放する際の開動作時の距離及び閉動作時の距離とは異なる距離に変更する第二距離変更動作の少なくとも一方を行う第一制御部と、
前記2つの第一把持部材が把持した前記第一対象物の重量値、及び、前記2つの第一把持部材が解放した前記第一対象物の重量値の少なくとも一方である第一重量値を用いて、前記2つの第二把持部材が把持する前記第二対象物の重量値、及び、前記2つの第二把持部材が解放する前記第二対象物の重量値の少なくとも一方である第二重量値を決定する第二制御部と、
を備える制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、把持システム及び制御装置に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来、2つの把持部材によって対象物を把持する複数のロボットを備える把持システムが知られている。例えば、特許文献1には、第1把持手を有する第1把持部と、第1把持手とは異なる形状を有する第2把持手を有する第2把持部と、第1把持部にて把持された第1物品の重量値、及び、第1把持部から排出された第1物品の重量値の少なくとも一方を取得する取得部と、重量値に基づき、第2把持部からの第2物品の排出を制御する制御部と、を備える計量システム(把持システム)が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-38771号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来の把持システムでは、把持または解放する対象物の重量調整を適切に行えないおそれがある。例えば、上記特許文献1では、第1把持部とは形状が異なる第2把持部によって重量調整を行っているが、第1把持部による重量値が予想以上に目標重量から外れた等によって第2把持部による重量調整量が大きくなった場合に対応できないおそれがある。このように、把持システムにおいて、把持または解放する対象物の重量調整を精度良く行うことが望まれる。
【0005】
本発明は、本願発明者が上記課題に新たに着目することによってなされたものであり、把持または解放する対象物の重量値の精度を向上できる把持システム及び制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る把持システムは、第一対象物を把持する2つの第一把持部材を有する第一ロボットと、第二対象物を把持する2つの第二把持部材を有する第二ロボットと、前記第一ロボット及び前記第二ロボットの少なくとも一方の動作を制御する制御装置と、を備え、前記制御装置は、前記2つの第一把持部材の間の距離を、前記2つの第一把持部材が前記第一対象物を把持または解放する際の開動作時の距離及び閉動作時の距離とは異なる距離に変更する第一距離変更動作、及び、前記2つの第二把持部材の間の距離を、前記2つの第二把持部材が前記第二対象物を把持または解放する際の開動作時の距離及び閉動作時の距離とは異なる距離に変更する第二距離変更動作の少なくとも一方を行う第一制御部と、前記2つの第一把持部材が把持した前記第一対象物の重量値、及び、前記2つの第一把持部材が解放した前記第一対象物の重量値の少なくとも一方である第一重量値を用いて、前記2つの第二把持部材が把持する前記第二対象物の重量値、及び、前記2つの第二把持部材が解放する前記第二対象物の重量値の少なくとも一方である第二重量値を決定する第二制御部と、を有する。
【0007】
本発明の一態様に係る制御装置は、第一対象物を把持する2つの第一把持部材を有する第一ロボット、及び、第二対象物を把持する2つの第二把持部材を有する第二ロボットの少なくとも一方の動作を制御する制御装置であって、前記2つの第一把持部材の間の距離を、前記2つの第一把持部材が前記第一対象物を把持または解放する際の開動作時の距離及び閉動作時の距離とは異なる距離に変更する第一距離変更動作、及び、前記2つの第二把持部材の間の距離を、前記2つの第二把持部材が前記第二対象物を把持または解放する際の開動作時の距離及び閉動作時の距離とは異なる距離に変更する第二距離変更動作の少なくとも一方を行う第一制御部と、前記2つの第一把持部材が把持した前記第一対象物の重量値、及び、前記2つの第一把持部材が解放した前記第一対象物の重量値の少なくとも一方である第一重量値を用いて、前記2つの第二把持部材が把持する前記第二対象物の重量値、及び、前記2つの第二把持部材が解放する前記第二対象物の重量値の少なくとも一方である第二重量値を決定する第二制御部と、を備える。
【発明の効果】
【0008】
本発明における把持システム等によれば、把持または解放する対象物の重量値の精度を向上できる。
【図面の簡単な説明】
【0009】
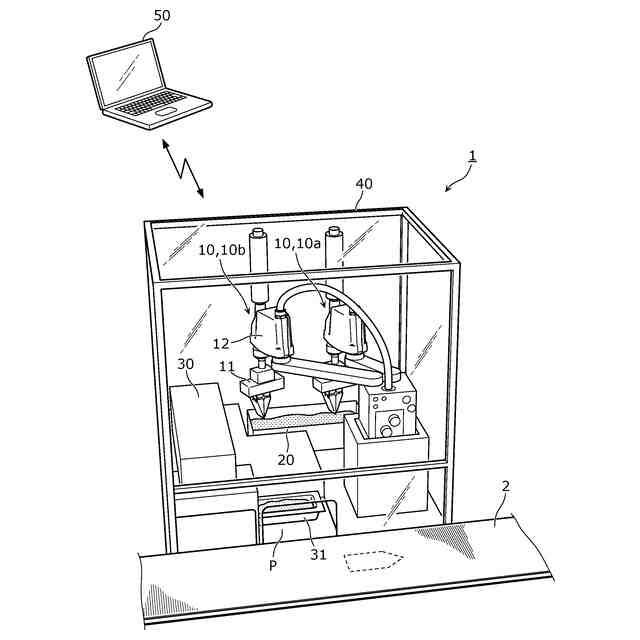
実施の形態に係る把持システムの外観を示す斜視図である。
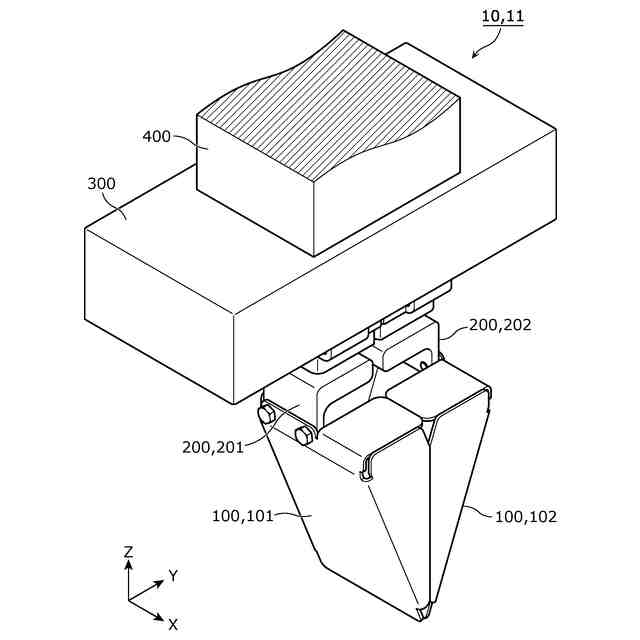
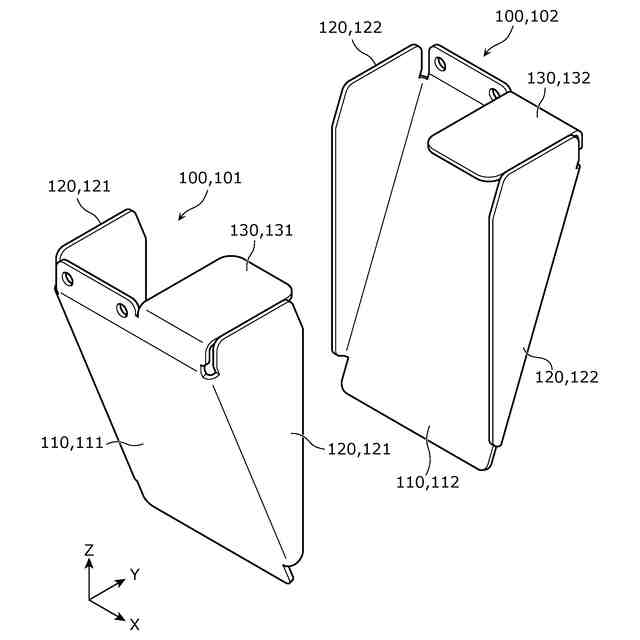
実施の形態に係るロボットのハンドの構成を示す斜視図である。
実施の形態に係るロボットのハンドが有する把持部材の構成を示す斜視図である。
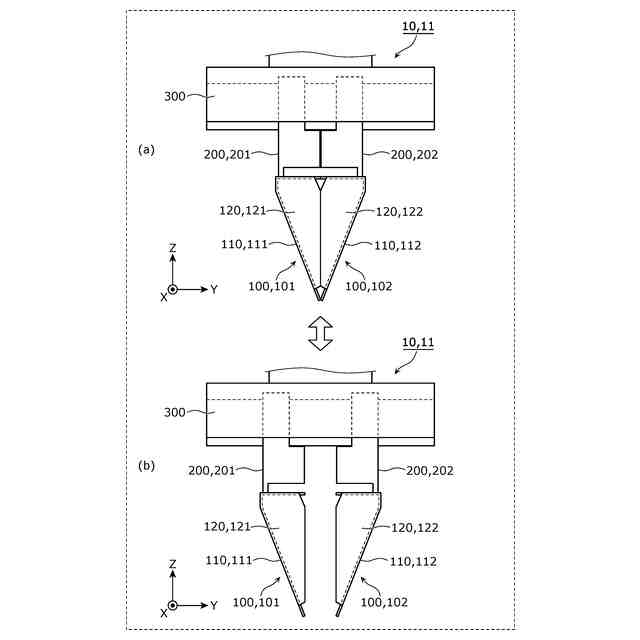
実施の形態に係るロボットのハンドが有する把持部材の開閉動作を示す正面図である。
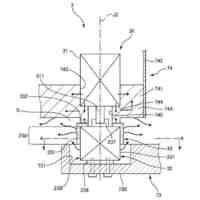
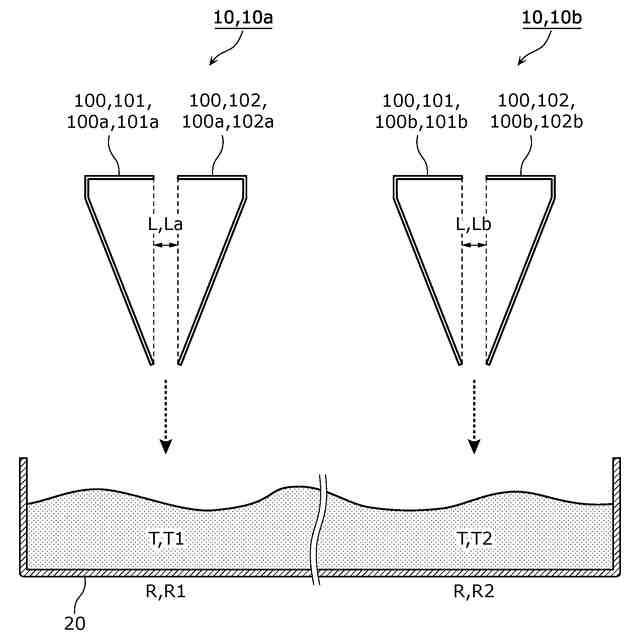
実施の形態に係るロボットのハンドが有する把持部材と対象物収容部とを示す模式図である。
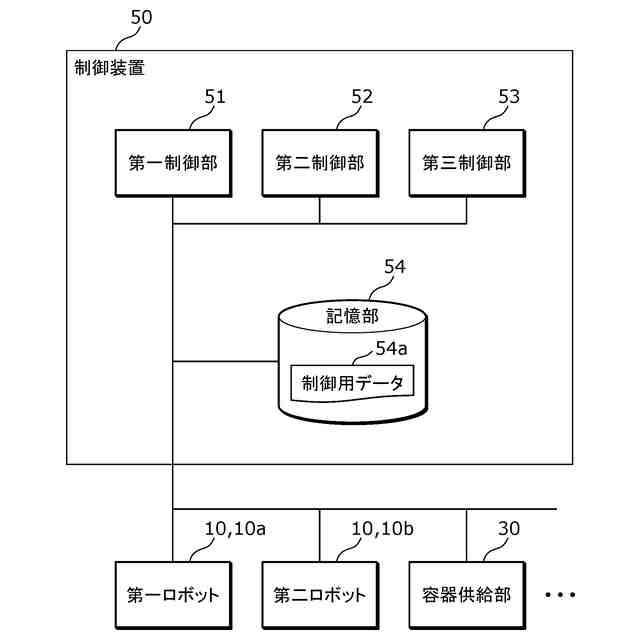
実施の形態に係る制御装置の機能的な構成を示すブロック図である。
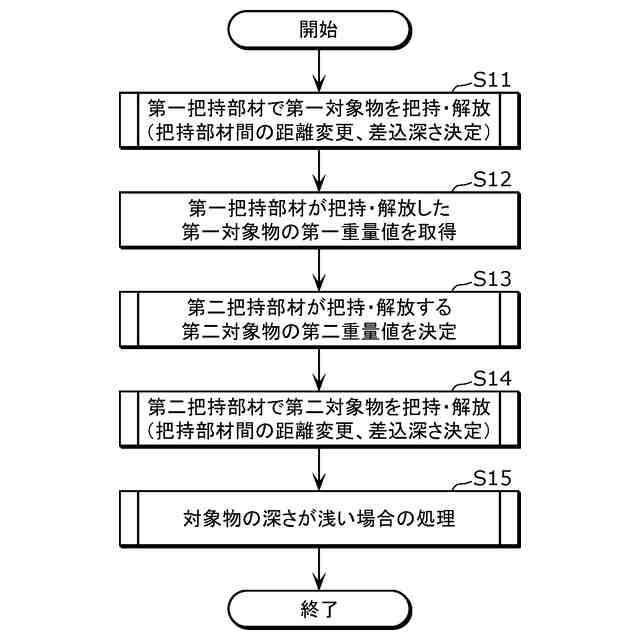
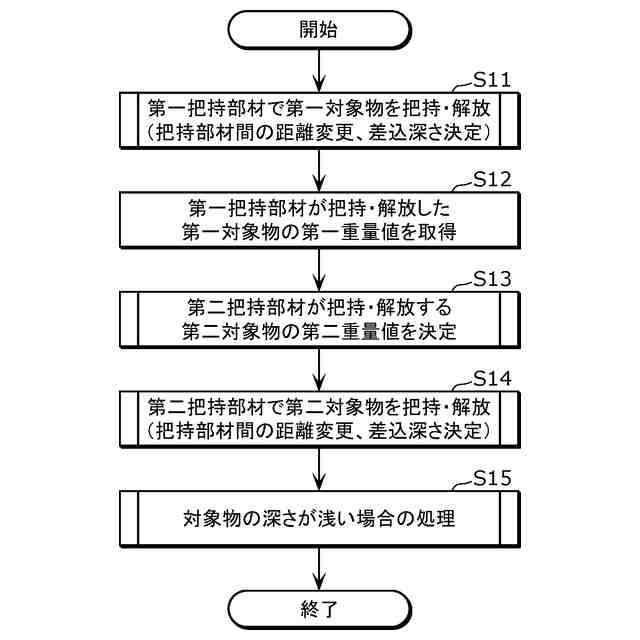
実施の形態に係る制御装置がロボットの動作を制御する処理を示すフローチャートである。
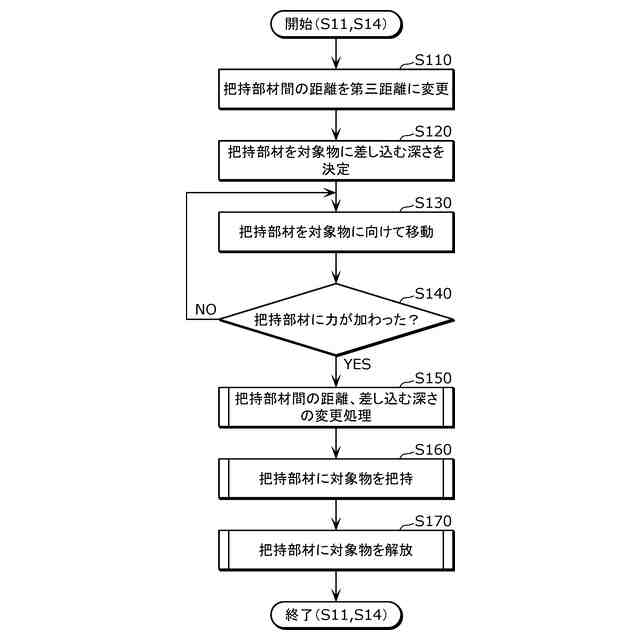
実施の形態に係る第一制御部が2つの把持部材に対象物を把持させて解放させる処理を示すフローチャートである。
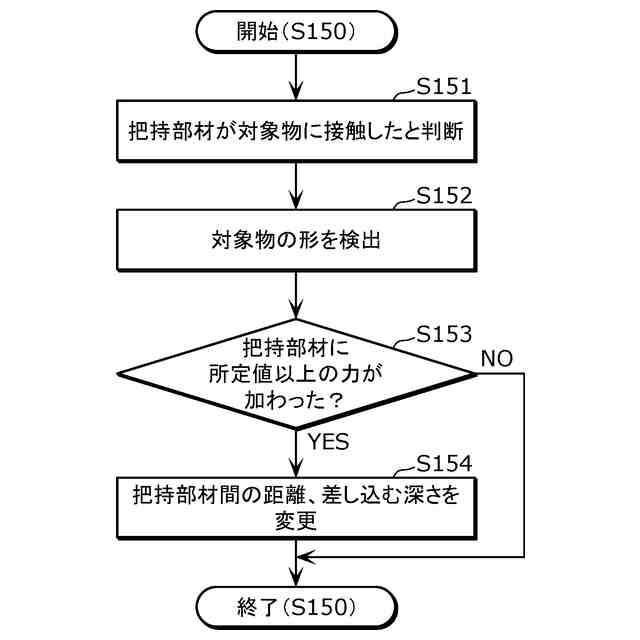
実施の形態に係る第一制御部が2つの把持部材の間の距離や把持部材を対象物に差し込む深さを変更する処理を示すフローチャートである。
実施の形態に係る第一制御部が2つの把持部材の間の距離や把持部材を対象物に差し込む深さを変更する処理を説明する模式図である。
実施の形態に係る第一制御部が2つの把持部材に対象物を把持させる処理を示すフローチャートである。
実施の形態に係る第一制御部が2つの把持部材に対象物を把持させる処理を説明する模式図である。
実施の形態に係る第一制御部が2つの把持部材に対象物を把持させる処理を説明する模式図である。
実施の形態に係る第一制御部が2つの把持部材に対象物を把持させる処理を説明する模式図である。
実施の形態に係る第一制御部が2つの把持部材に対象物を解放させる処理を示すフローチャートである。
実施の形態に係る第二制御部が、2つの第一把持部材が把持、解放した第一重量値を用いて、2つの第二把持部材が把持、解放する第二重量値を決定する処理を示すフローチャートである。
実施の形態に係る第一制御部が対象物収容部内の対象物の深さが浅い場合に行う各種処理を示すフローチャートである。
実施の形態に係る第一制御部が対象物収容部内の対象物の深さが浅い場合に行う各種処理を説明する模式図である。
【発明を実施するための形態】
【0010】
本発明の一態様に係る把持システムは、第一対象物を把持する2つの第一把持部材を有する第一ロボットと、第二対象物を把持する2つの第二把持部材を有する第二ロボットと、前記第一ロボット及び前記第二ロボットの少なくとも一方の動作を制御する制御装置と、を備え、前記制御装置は、前記2つの第一把持部材の間の距離を、前記2つの第一把持部材が前記第一対象物を把持または解放する際の開動作時の距離及び閉動作時の距離とは異なる距離に変更する第一距離変更動作、及び、前記2つの第二把持部材の間の距離を、前記2つの第二把持部材が前記第二対象物を把持または解放する際の開動作時の距離及び閉動作時の距離とは異なる距離に変更する第二距離変更動作の少なくとも一方を行う第一制御部と、前記2つの第一把持部材が把持した前記第一対象物の重量値、及び、前記2つの第一把持部材が解放した前記第一対象物の重量値の少なくとも一方である第一重量値を用いて、前記2つの第二把持部材が把持する前記第二対象物の重量値、及び、前記2つの第二把持部材が解放する前記第二対象物の重量値の少なくとも一方である第二重量値を決定する第二制御部と、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
10日前
株式会社ザイテック
吸着装置
2か月前
株式会社ジャノメ
ロボット
1か月前
株式会社不二越
ロボットシステム
4日前
住友重機械工業株式会社
教示装置
1か月前
株式会社ダイヘン
搬送装置
2か月前
個人
ペグハンマおよびペグハンマ用部品
2か月前
川崎重工業株式会社
ロボット
1か月前
日本精工株式会社
締結用工具
7日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
2か月前
トヨタ自動車株式会社
カプラ接続治具
14日前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
ARMA株式会社
ジョイントフレーム
5日前
住友重機械工業株式会社
支援装置
2か月前
住友重機械工業株式会社
支援装置
2か月前
株式会社マキタ
電気機器
1か月前
積水ハウス株式会社
フィルム除去具
26日前
ホシデン株式会社
分解用治具
2か月前
オークラ輸送機株式会社
ハンド装置
2か月前
アピュアン株式会社
衝撃工具
2か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
1か月前
株式会社リコー
多関節ロボット
2か月前
ダイハツ工業株式会社
移載治具
5日前
株式会社不二越
ロボットシステム
20日前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社清水製作所
電動工具の吊下げ具
1か月前
セイコーエプソン株式会社
ロボット
4日前
セイコーエプソン株式会社
ロボット
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ