TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105861
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2025074754,2024089994
出願日
2025-04-28,2020-08-05
発明の名称
作業車両の自律走行システム
出願人
ヤンマーホールディングス株式会社
代理人
弁理士法人あーく事務所
主分類
A01B
69/00 20060101AFI20250703BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】農作業車両の自律走行システムにおいて、畝の形状変化に左右されることなく、農作業車両を畝に沿って高い精度で自律走行させる技術を提供する。
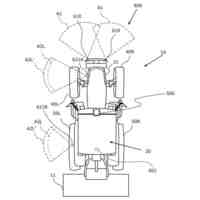
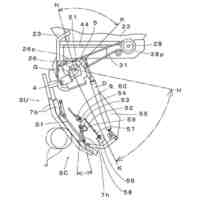
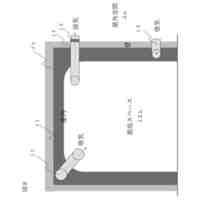
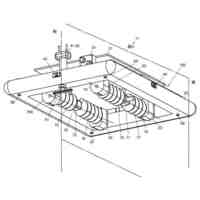
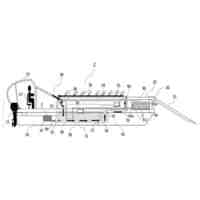
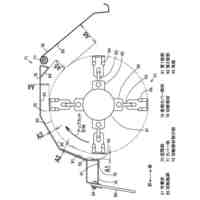
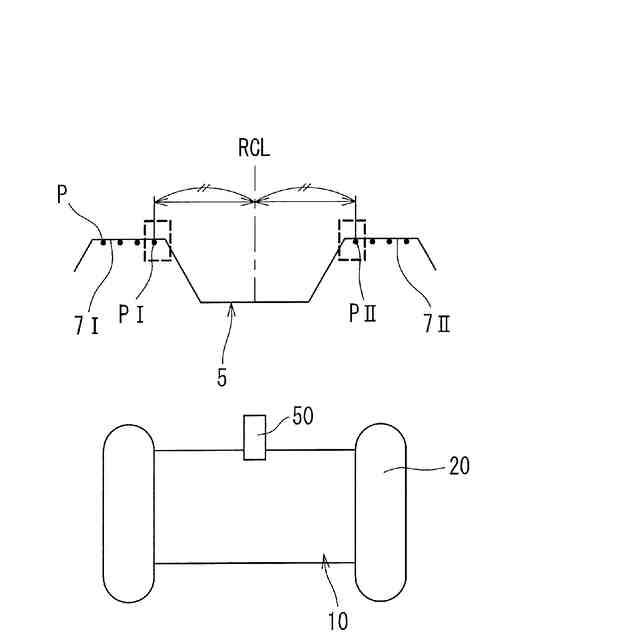
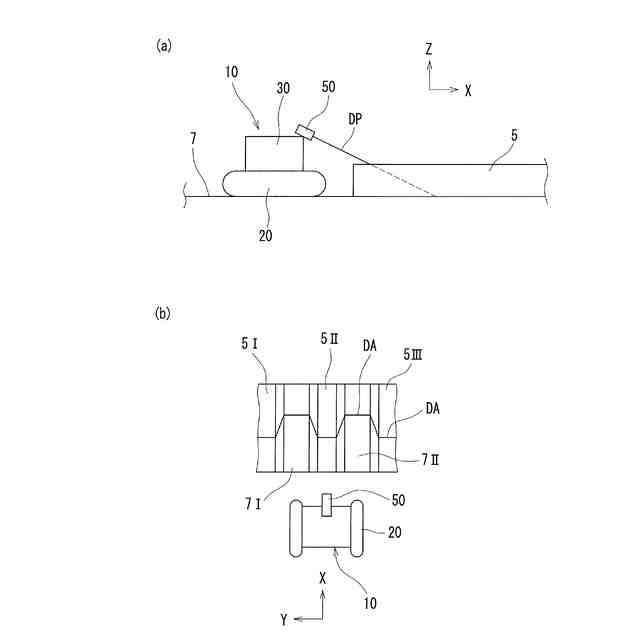
【解決手段】圃場内で畝5を跨ぎながら農作業を行う農作業車両10を、畝5に沿って自律走行させる農作業車両の自律走行システムである。1条の畝5の両隣の走行面7I,7IIを走行するように離間して設けられた一対の走行部20を有する農作業車両10と、農作業車両10によって跨がれている畝5の両隣の走行面7I,7IIを検出領域に含むように農作業車両10に設置された畝倣い用LiDAR50と、2条の走行面7I,7IIに関する情報に基づいて、農作業車両10によって跨がれている畝5の中心線RCLを推定するとともに、推定された畝5の中心線RCLと農作業車両10の中心線との誤差に基づいて、農作業車両10を畝5に沿うように走行させる制御装置と、を備えている。
【選択図】図13
特許請求の範囲
【請求項1】
複数条の畝からなる畝群と、隣り合う畝の間に形成された走行面と、を有する圃場において前記畝群を跨ぎながら作業を行う作業車両を前記畝に沿って自律走行させる作業車両の自律走行システムであって、
前記作業車両に設置された距離センサと、
前記距離センサによって検出された情報に基づいて前記作業車両によって跨がれている前記畝群の中心線を推定する推定手段と、
前記推定手段によって推定された前記畝群の中心線と前記作業車両の中心線との誤差に基づいて、前記作業車両を前記畝群に沿うように走行させる制御手段と、を備え、
前記畝の両隣に位置する前記走行面上の複数の点からなる点群において、水平方向に延在するフラットな面上の点群を取り出すことにより前記畝群の中心線上の点を推定するように構成されていることを特徴とする作業車両の自律走行システム。
続きを表示(約 780 文字)
【請求項2】
前記フラットな点群を取り出す場合には、
さらに前記畝の傾斜部分における各法面上の複数の点からなる点群、および、前記畝の頂面上における複数の点から成る点群を取得し、そのうちの前記フラットな点群だけを取り出すことを特徴とする、請求項1に記載の作業車両の自律走行システム。
【請求項3】
前記推定手段は、前記畝群上および当該畝群の両隣の2条の前記各走行面上の点群のうち、前記畝群の両側の傾斜した各法面上の点群を排除し、前記畝群の下端近辺の高さである所定の高さ範囲に含まれる点群を取り出すことにより前記畝群の頂面上の点群を排除し、この取り出された点群である前記各走行面上の点群のうち、一方の前記走行面上の点群の中で最も前記畝群に近い点と、他方の走行面上の点群の中で最も前記畝群に近い点との中点を当該畝群の中心線上の点と推定するように構成されていることを特徴とする、請求項1に記載の作業車両の自律走行システム。
【請求項4】
複数条の畝からなる畝群と、隣り合う畝の間に形成された走行面と、を有する圃場において前記畝群を跨ぎながら作業を行う作業車両を前記畝に沿って自律走行させる作業車両の自律走行システムであって、
前記作業車両に設置された距離センサと、
前記距離センサによって検出された情報に基づいて前記作業車両によって跨がれている前記畝群の中心線を推定する推定手段と、
前記推定手段によって推定された前記畝群の中心線と前記作業車両の中心線との誤差に基づいて、前記作業車両を前記畝群に沿うように走行させる制御手段と、を備え、
前記畝の両隣に位置する前記走行面上の複数の点からなる点群から前記畝群の中心線上の点を推定するように構成されていることを特徴とする作業車両の自律走行システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両の自律走行システムに関し、特に、作業車両を畝に沿って自律走行させる作業車両の自律走行システムに関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来から、農作業の省力化や効率化を図るべく、圃場内で畝を跨ぎながら農作業を行う農作業車両を、畝に自動追従させる自律走行システムが種々提案されている。このような自律走行システムには、例えば、畝と接触する感圧式畝検出板の位置変化に基づいて、畝と植付ユニットの位置関係を制御するものもあるが、かかる自律走行システムでは、畝検出板によって畝を崩したり、削ったりするおそれや、畝検出板と畝との接触による振動を受けるため、検出精度が低いという問題がある。
【0003】
そこで、例えば特許文献1には、走行車に植付ユニットを左右移動調節自在に装備し、苗を移植する移植畝までの距離を検出する超音波式畝センサを植付ユニットに設け、畝センサの出力信号に基づいて植付ユニットを左右移動制御して、移植畝に沿った植付ユニットの自動追従を行わせるようにした移植機が提案されている。
【先行技術文献】
【特許文献】
【0004】
特開平8-280213号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献1のものでは、畝と非接触の超音波式畝センサを用いることから、畝を崩したり、削ったりするのを抑えることは可能となる。
【0006】
もっとも、特許文献1のものでは、畝の法面との間の距離を畝センサで検出するところ、畝の形状が崩れているような場合には、畝との距離を検出することが困難となるため、畝の形状変化に対するロバスト性(外乱の影響を受け難い性質)が低いという問題がある。
【0007】
本発明はかかる点に鑑みてなされたものであり、その目的とするところは、作業車両の自律走行システムにおいて、畝の形状変化に左右されることなく、作業車両を畝に沿って高い精度で自律走行させる技術を提供することにある。
【課題を解決するための手段】
【0008】
前記目的を達成するため、本発明に係る作業車両の自律走行システムでは、畝上および走行面上の複数の点からなる点群のうち、水平方向に延在するフラットな面上の点群だけを取り出すことにより畝群の中心線上の点を推定するようにしている。
【0009】
具体的には、本発明は、複数条の畝からなる畝群と、隣り合う畝の間に形成された走行面と、を有する圃場において前記畝群を跨ぎながら作業を行う作業車両を前記畝に沿って自律走行させる作業車両の自律走行システムを対象としている。
【0010】
そして、この自律走行システムは、前記作業車両に設置された距離センサと、前記距離センサによって検出された情報に基づいて前記作業車両によって跨がれている前記畝群の中心線を推定する推定手段と、前記推定手段によって推定された前記畝群の中心線と前記作業車両の中心線との誤差に基づいて、前記作業車両を前記畝群に沿うように走行させる制御手段とを備え、前記畝の両隣に位置する前記走行面上の複数の点からなる点群において、水平方向に延在するフラットな面上の点群を取り出すことにより前記畝群の中心線上の点を推定するように構成されていることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釣り用ルアー
20日前
個人
播種機
1か月前
個人
釣り用ルアー
20日前
個人
尿処理材
1か月前
個人
獣捕獲罠装置
今日
株式会社シマノ
釣竿
4日前
井関農機株式会社
作業車両
21日前
株式会社アテックス
草刈機
5日前
個人
ペット用オムツカバー
4日前
株式会社アテックス
草刈機
1か月前
井関農機株式会社
コンバイン
26日前
井関農機株式会社
圃場作業機
22日前
株式会社シマノ
釣り具
26日前
個人
水耕栽培システム
1か月前
有限会社マイク
囲い罠
26日前
個人
室内栽培システム
29日前
井関農機株式会社
歩行型管理機
20日前
井関農機株式会社
圃場管理装置
1か月前
株式会社西部技研
空調システム
1か月前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
移植機
1か月前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
圃場管理装置
1か月前
個人
植物栽培装置
6日前
井関農機株式会社
作業車両
1か月前
株式会社シマノ
釣竿
21日前
株式会社シマノ
釣竿
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
株式会社ダイイチ
海苔網の酸処理船
29日前
松山株式会社
草刈作業機
19日前
株式会社村岡水産
釣り用ワーム
20日前
株式会社パクマケ
植栽用遮光板
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ