TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103888
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221588
出願日
2023-12-27
発明の名称
車両制御方法及び車両制御装置
出願人
日産自動車株式会社
代理人
弁理士法人後藤特許事務所
主分類
B60L
15/20 20060101AFI20250702BHJP(車両一般)
要約
【課題】より高精度に車体速度を推定して好適な駆動輪のスリップ制御を可能とする車両制御方法及び制御装置を提供する。
【解決手段】電動車両の駆動状態に応じて分割された複数のデータ領域I~IIIを定め、モータトルク指令値に基づいてモータを駆動させた際の電動車両の加減速度aを取得し、取得した加減速度a及びモータトルク指令値に基づいて定まる駆動力Fを各データ領域I~IIIに保持し、各データ領域I~IIIに保持されている加減速度(a1,a2,a3)及び駆動力(F1,F2,F3)を参照して車両質量推定値を算出する。
【選択図】図13
特許請求の範囲
【請求項1】
モータを走行駆動源とする電動車両において、所定のモータトルク指令値に基づいて前記モータを駆動し、前記電動車両の駆動状態に基づいて車両質量推定値を算出する車両制御方法であって、
前記電動車両の駆動状態に応じて分割された複数のデータ領域を定め、
前記モータトルク指令値に基づいて前記モータを駆動させた際の前記電動車両の加減速度を取得し、
取得した前記加減速度及び前記モータトルク指令値に基づいて定まる駆動力を各データ領域に保持し、
前記各データ領域に保持されている前記加減速度及び前記駆動力を参照して前記車両質量推定値を算出する、
車両制御方法。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の車両制御方法であって、
前記車両質量推定値に基づいて車体速推定値を算出し、
前記車体速推定値を用いた駆動輪のスリップ制御を実行して、前記電動車両に対する要求駆動力に基づく基本モータトルク指令値から前記モータトルク指令値を算出する、
車両制御方法。
【請求項3】
請求項2に記載の車両制御方法であって、
前記スリップ制御では、
前記車体速推定値に基づいて前記駆動輪のスリップ状態を判定し、
前記車体速推定値及び前記スリップ状態に基づいて、前記モータトルク指令値を算出し、
前記モータトルク指令値、前記車両質量推定値、及び勾配抵抗推定値に基づいて前記車体速推定値を算出する、
車両制御方法。
【請求項4】
請求項1に記載の車両制御方法であって、
前記各データ領域に保持されている前記加減速度及び前記駆動力を、前記各データ領域ごとの母集団により算出する、
車両制御方法。
【請求項5】
請求項1に記載の車両制御方法であって、
前記各データ領域に保持されている前記加減速度及び前記駆動力に対して線形回帰を実行し、得られる回帰直線の傾きを前記車両質量推定値として算出する、
車両制御方法。
【請求項6】
請求項1に記載の車両制御方法であって、
前記電動車両の走行シーンで生じる抵抗成分を推定し、
前記モータトルク指令値を前記抵抗成分で補正することで前記駆動力を算出する、
車両制御方法。
【請求項7】
請求項5に記載の車両制御方法であって、
前記回帰直線の切片を勾配抵抗推定値として算出する、
車両制御方法。
【請求項8】
モータを走行駆動源とする電動車両において、所定のモータトルク指令値に基づいて前記モータを駆動し、前記電動車両の駆動状態に基づいて車両質量推定値を算出する車両制御装置であって、
前記電動車両の駆動状態に応じて分割された複数のデータ領域を定める設定部と、
前記モータトルク指令値に基づいて前記モータを駆動させた際の前記電動車両の加減速度を取得する取得部と、
取得した前記加減速度及び前記モータトルク指令値に基づいて定まる駆動力を各データ領域に保持する保持部と、
前記各データ領域に保持されている前記加減速度及び前記駆動力を参照して前記車両質量推定値を算出する算出部と、を有する、
車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御方法及び車両制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、荷物の積載量などに応じて車両全体の質量が変動するシーンを想定し、車両の走行中に質量を推定する技術が知られている。特許文献1には、車両の加速度及び駆動力に基づいて車両の質量を推定する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-38151号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一方で、本発明者らは、既存の質量推定方法では、車両の駆動状態によっては質量推定値の精度が十分に確保されず、当該質量推定値に基づく車両の挙動制御(スリップ制御等)の信頼性が低下するおそれがある点に着目した。
【0005】
このような事情に鑑み、本発明は、車両の走行中においてより高精度に車両の質量を推定し得る車両制御方法及び車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明のある態様によれば、モータを走行駆動源とする電動車両において、所定のモータトルク指令値に基づいてモータを駆動し、電動車両の駆動状態に基づいて車両質量推定値を算出する車両制御方法が提供される。
【0007】
この車両制御方法では、電動車両の駆動状態に応じて分割された複数のデータ領域を定め、モータトルク指令値に基づいてモータを駆動させた際の電動車両の加減速度を取得し、取得した加減速度及びモータトルク指令値に基づいて定まる駆動力を各データ領域に保持し、各データ領域に保持されている加減速度及び駆動力を参照して車両質量推定値を算出する。
【発明の効果】
【0008】
本発明によれば、車両の走行中においてより高精度に車両の質量を推定することができる。
【図面の簡単な説明】
【0009】
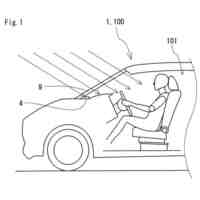
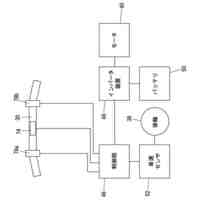
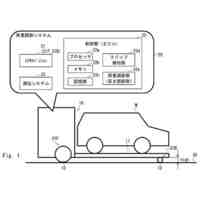
図1は、本実施形態による車両制御方法を実行する電動車両制御システムの構成を説明する図である。
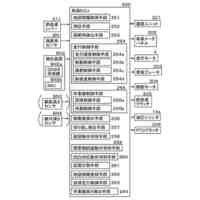
図2は、車両制御方法の全体的な処理を説明するフローチャートである。
図3は、アクセル開度-トルクテーブルの一例を示す図である。
図4は、前後左右駆動力分配処理を説明するための図である。
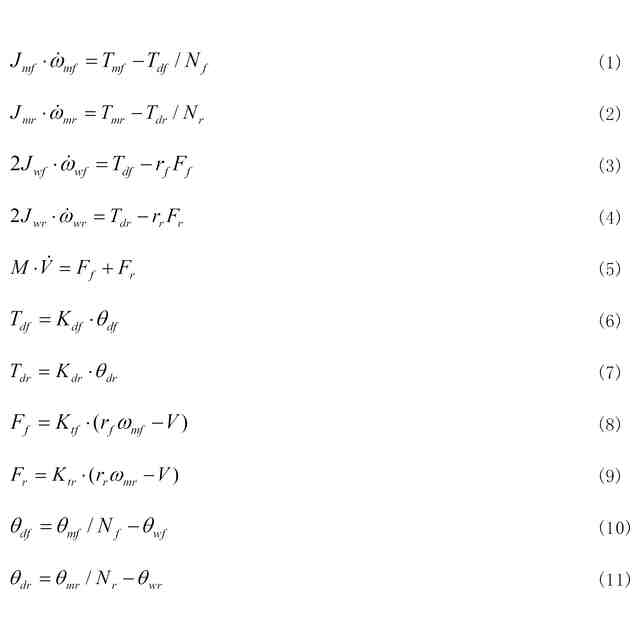
図5は、4WD電動車両の駆動力伝達系をモデル化した図である。
図6は、車体速推定処理について説明するためのブロック図である。
図7は、車両質量推定処理の詳細を説明するブロック図である。
図8は、推定車速算出処理の一例(簡易モデル)を説明するブロック図である。
図9は、推定車速算出処理の一例(詳細モデル)を説明するブロック線図である。
図10は、スリップ制御処理について説明するブロック図である。
図11は、フロント目標回転数規定処理を説明するブロック図である。
図12は、フロントスリップ制御処理を説明するブロック線図である。
図13は、質量推定を説明するフローチャートである。
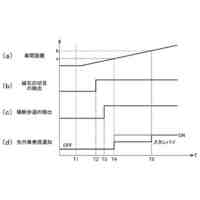
図14は、比較例1及び実施例1におけるそれぞれの車両質量推定値の経時変化を示すタイミングチャートである。
図15は、実施例2の制御結果を示すタイミングチャートである。
図16は、比較例2の制御結果を示すタイミングチャートである。
図17は、第1変形例による電動車両制御システムの構成を説明する図である。
図18は、第2変形例による電動車両制御システムの構成を説明する図である。
図19は、第3変形例による電動車両制御システムの構成を説明する図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
1か月前
個人
警告装置
2か月前
個人
車窓用防虫網戸
2か月前
個人
小型EVシステム
3か月前
個人
車輪清掃装置
1か月前
個人
ホイルのボルト締結
12日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
個人
キャンピングトライク
27日前
個人
車両用スリップ防止装置
18日前
個人
キャンピングトレーラー
27日前
個人
アクセルのソフトウェア
17日前
個人
ワイパーゴム性能保持具
1か月前
日本精機株式会社
車載表示装置
13日前
株式会社ニフコ
保持装置
11日前
井関農機株式会社
収穫作業車両
2か月前
個人
自動車ドア開度規制ベルト
2か月前
株式会社クラベ
ヒータユニット
1か月前
個人
車載小物入れ兼雨傘収納具
10日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
24日前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用投影装置
1か月前
井関農機株式会社
作業車両
24日前
トヨタ自動車株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
18日前
日本精機株式会社
車両用表示装置
1か月前
株式会社ユーシン
照明装置
2か月前
日本精機株式会社
車両用投影装置
1か月前
エムケー精工株式会社
車両処理装置
1か月前
ダイハツ工業株式会社
車両構造
2か月前
ヤマハ発動機株式会社
電動車両
3日前
トヨタ自動車株式会社
運搬車両
25日前
豊田合成株式会社
乗員保護装置
26日前
スズキ株式会社
車両の制御装置
1か月前
ダイハツ工業株式会社
積載装置
24日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ