TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101074
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023217649
出願日
2023-12-25
発明の名称
歩行検知装置、情報処理システム、情報処理装置、歩行支援ロボット、方法およびプログラム
出願人
株式会社リコー
代理人
弁理士法人MIP
主分類
A61B
5/11 20060101AFI20250630BHJP(医学または獣医学;衛生学)
要約
【課題】 歩行検知装置を提供すること。
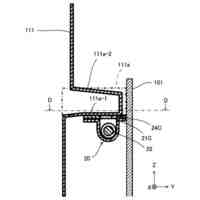
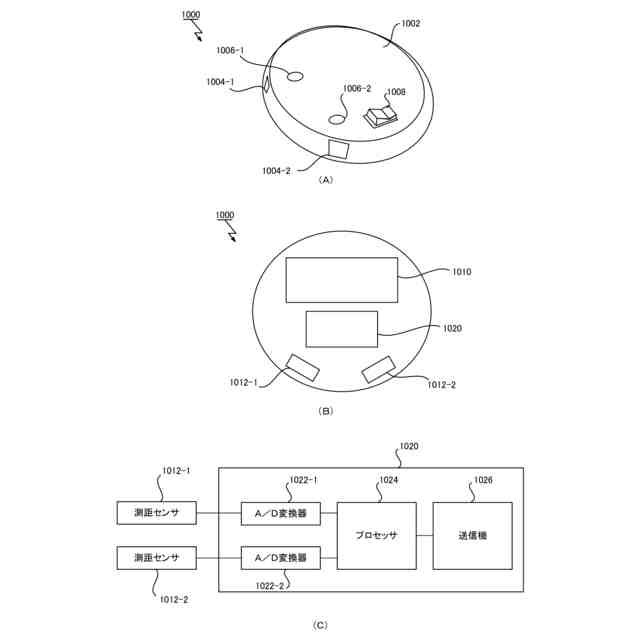
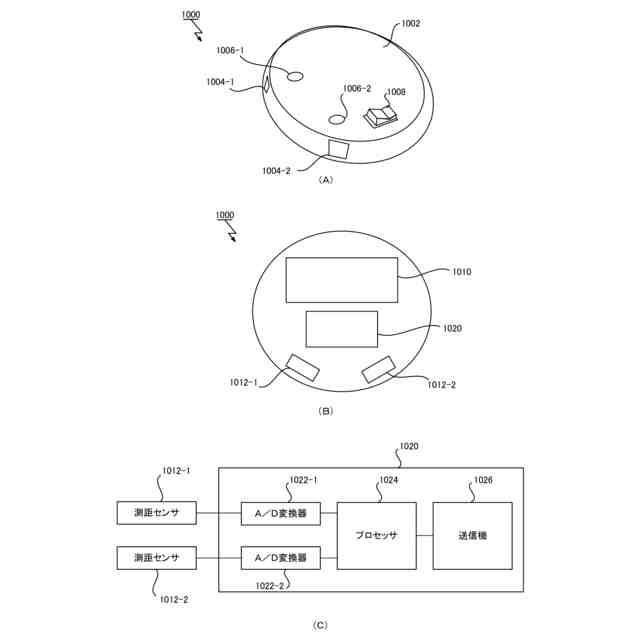
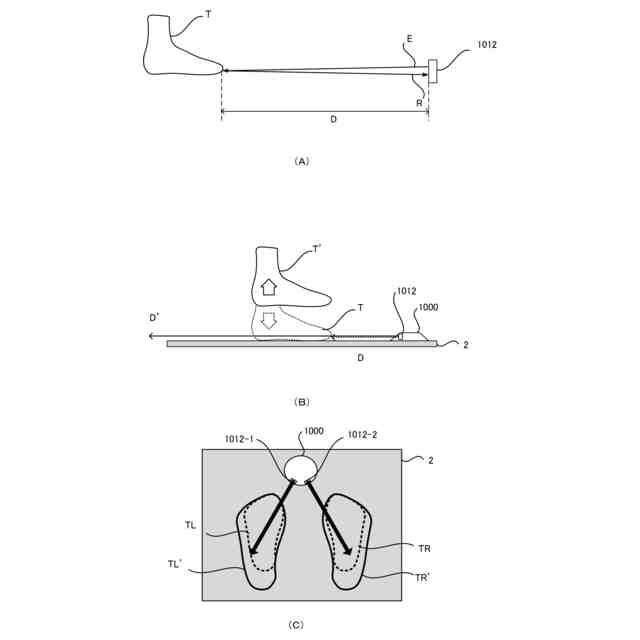
【解決手段】本歩行検知装置1000は、照射光の照射および反射光の受光により対象Tまでの距離Dを測定する光学式測距センサ1012と、光学式測距センサ1012による対象Tまでの検知距離Dに基づいて、歩行運動における対象の動作を検知する検知部1024とを含む。ここで、対象は、歩行運動を行う利用者の足であってよく、光学式測距センサは、利用者の足までの距離を測定してもよい。検知部は、所定面に対する利用者の足の接地または離地の動作を検知してもよい。
【選択図】 図1
特許請求の範囲
【請求項1】
歩行検知装置であって、
照射光の照射および反射光の受光により対象までの距離を測定する光学式測距センサと、
前記光学式測距センサによる対象までの検知距離に基づいて、歩行運動における前記対象の動作を検知する検知部と
を含む、歩行検知装置。
続きを表示(約 1,100 文字)
【請求項2】
前記対象は、前記歩行運動を行う利用者の足であり、
前記光学式測距センサは、前記利用者の足までの距離を測定し、
前記検知部は、所定面に対する前記利用者の足の接地または離地の動作を検知する、請求項1に記載の歩行検知装置。
【請求項3】
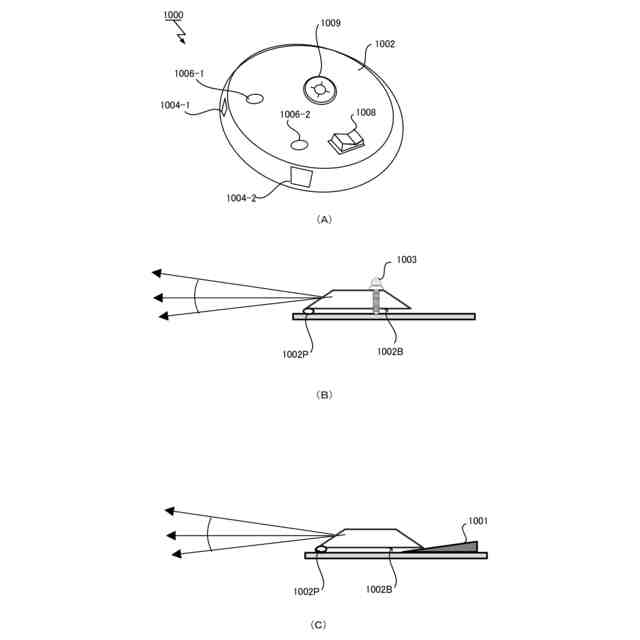
前記光学式測距センサは、前記歩行検知装置の配置面から所定の高さで前記配置面に略水平に検知方向を向けるように構成される、請求項2に記載の歩行検知装置。
【請求項4】
左足および右足それぞれに対して単一の前記光学式測距センサを有しており、左足に対する前記単一の光学式測距センサおよび右足に対する前記単一の光学式測距センサが、それぞれの検知方向が外側へ互いに広がるように配置されている、請求項3に記載の歩行検知装置。
【請求項5】
左足および右足それぞれに対して複数の光学式測距センサを有しており、左足および右足それぞれに対しての前記複数の光学式測距センサは、検知方向が外側へ広がるように配置されている、請求項3に記載の歩行検知装置。
【請求項6】
左足および右足それぞれに対しての前記複数の光学式測距センサの一部または全部により検知された結果の論理演算に基づき、左足および右足の前記動作を検知する、請求項5に記載の歩行検知装置。
【請求項7】
左足および右足それぞれに対しての前記複数の光学式測距センサを、前記歩行検知装置の起動時に一部が起動され、他の一部がスタンバイ状態となるように制御するとともに、一定時間、前記利用者の足の接地または離地の動作が検知されない場合に、前記一部の少なくとも1つをスタンバイ状態に切り替え、前記他の一部の少なくとも1つをアクティブ状態に切り替えるよう制御する制御部
をさらに備える、請求項5に記載の歩行検知装置。
【請求項8】
前記光学式測距センサは、両足に対しての単一の光学式測距センサである、請求項3に記載の歩行検知装置。
【請求項9】
複数の前記光学式測距センサを有しており、前記配置面に略水平な水平面内での前記複数の光学式測距センサのぞれぞれの検知方向の角度を調整可能とする機構を有している、請求項3に記載の歩行検知装置。
【請求項10】
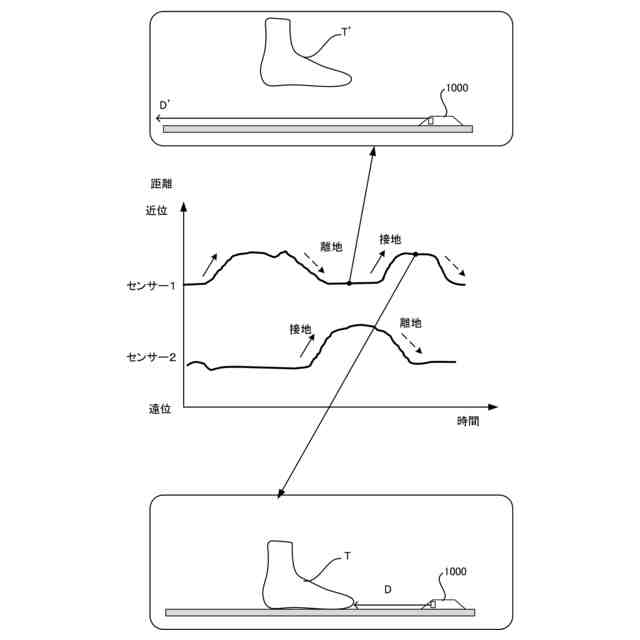
前記検知部は、前記検知距離が近位から遠位に変化した場合に足の離地の動作を検知し、または、前記検知距離が遠位から近位に変化した場合に足の接地の動作を検知する、請求項2に記載の歩行検知装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、歩行検知装置、情報処理システム、情報処理装置、歩行支援ロボット、方法およびプログラムに関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
従来、シート型圧センサーを用いて利用者の足踏みなどの歩行運動を検知する技術が知られている。しかしながら、利用者の足踏みを受ける構造(足が接地する部位)、センサ、センサに踏力を伝達する構成など複数の部品が必要になり、利用者が広く足踏みをできるように構成しようとすると構成部品のコストが高くなる。足が接地する部位の踏み心地や段差を踏まえた安全性を考慮すると、利用者の嗜好は多様であり、人によっては柔らかい方が好ましかったり、凸凹が好ましくなかったりし、また足踏みを検知するセンサの構造によっては厚みが出てしまい、つまづきを誘発したり、踏み心地のムラにより違和感を与えたりする可能性がある。そのため、利用者の多様な踏み方での検知と感触に対する選好の両方を満たすことが難しかった。
【0003】
足踏みの検知に関し、特許4580373号明細書(特許文献1)および特開2009-219508号公報(特許文献2)が知られている。
【0004】
特許文献1は、ゲームの進行に関する入力情報に対応した9つの表示領域を有する足踏みシートと、プレイヤーPの足がいずれの表示領域上に存在するかを検出する赤外線センサと、ゲームに登場するキャラクターなどのゲーム画像を表示するディスプレイと、赤外線センサの検出結果に応じて、ゲームを進行させる制御部とを備える体感型ゲーム機を開示する。しかしながら、特許文献1の従来技術では、赤外線センサを行列状に複数配置する必要があり、高コストとなり、また、配置場所も限られてしまう点で充分なものではなかった。
【0005】
特許文献2は、被験者が歩行するための自走式トレッドミルと、自走式トレッドミルのローラ回転数を検出するロータリーエンコーダと、ロータリーエンコーダの回転数と連動して、データ蓄積手段から読み出された歩行コースの映像データを被験者に表示する映像表示手段と、被験者に非接触で被験者の足先の高さを検出する光センサと、上記ロータリーエンコーダの回転数と連動してローラ回転開始時点からの歩行経過時間を計測するタイマーと、少なくとも上記映像表示手段と上記データ蓄積手段を制御する制御手段を備える歩行訓練システムを開示する。しかしながら、特許文献2の従来技術では、発光と受光のセンサをお互いに対向し固定した位置に配置しなければならず、センサを固定するためのフレームなどが必要となり、機器が大型化してしまう。そのために、複数の被験者が利用するような機器として構成することが難しく、かつ、常置場所が必要で、導入の要件が厳しかった。
【0006】
また、上記特許文献1および特許文献2の従来技術では、いずれも、利用者の足踏みを受ける構造が限定されており、人の多様な踏み方での検知と感触に対する選好の両方を満たす観点から、充分なものではなかった。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本開示は、上記点に鑑みてなされたものであり、本開示は、小型で任意の場所に容易に配置することができ、利用者の多様な足の動きを検知することができる歩行検知装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本開示では、上記課題を解決するために、下記特徴を有する歩行検知装置を提供する。歩行検知装置は、照射光の照射および反射光の受光により対象までの距離を測定する光学式測距センサを備える。歩行検知装置は、さらに、光学式測距センサによる対象までの検知距離に基づいて、歩行運動における対象の動作を検知する検知部をさらに備える。
【発明の効果】
【0009】
上記構成により、小型で任意の場所に容易に配置することができ、利用者の多様な足の動きを検知することができる歩行検知装置を提供することが可能となる。
【図面の簡単な説明】
【0010】
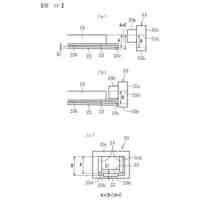
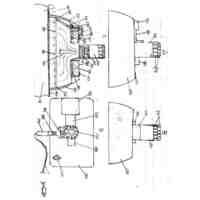
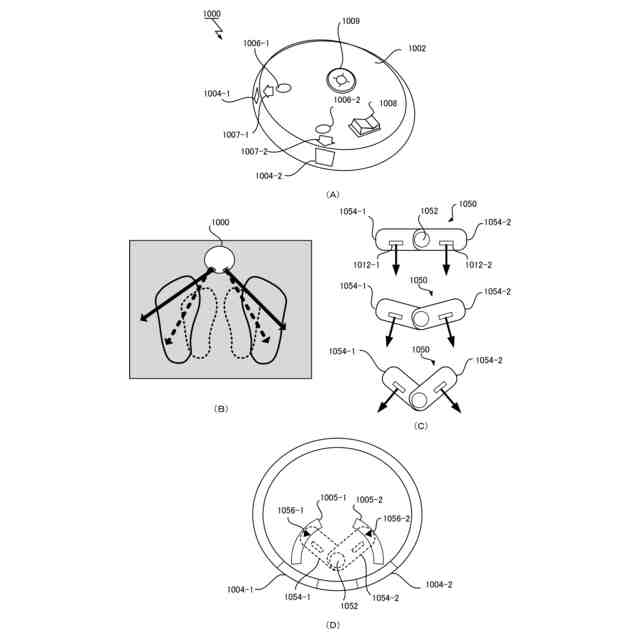
本開示の第1の実施形態にかかる歩行検知装置である歩行センサユニットの概略図である。
本開示の第1の実施形態にかかる歩行検知装置である歩行センサユニットによる歩行検知の仕方を説明する図である。
本開示の第1の実施形態にかかる歩行検知装置である歩行センサユニットによる、検知距離Dを示すデジタル信号(電圧値)に基づく歩行検知の仕方を説明する図である。
本開示の第1の実施形態にかかる歩行検知装置である歩行センサユニットの配置場所の傾斜により検知位置がばらつく状況を例示する図である。
本開示の第1の実施形態にかかる歩行検知装置である歩行センサユニットの変形例を示す図である。
本開示の第1の実施形態にかかる歩行検知装置である歩行センサユニットの別の変形例を示す図である。
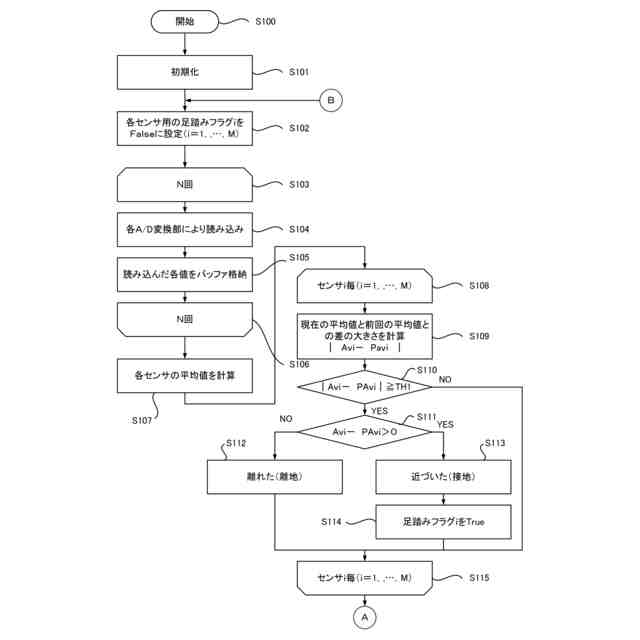
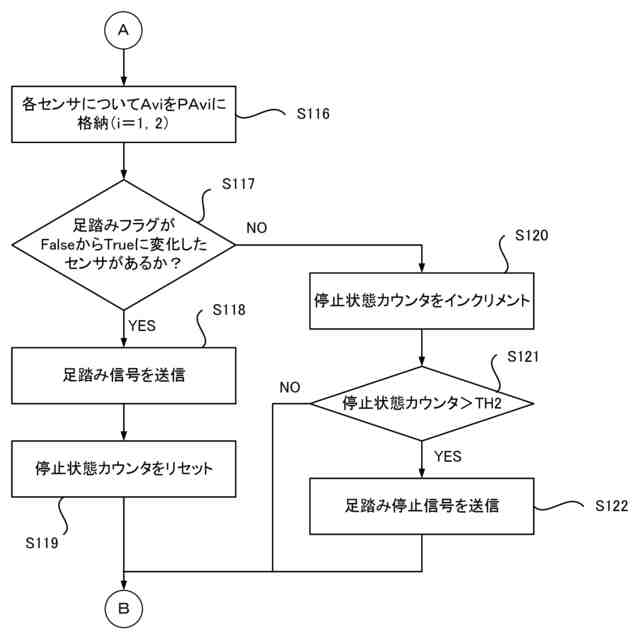
本開示の第1の実施形態にかかる歩行検知装置である歩行センサユニットが実行する歩行検知処理を示すフローチャート(1/2)である。
本開示の第1の実施形態にかかる歩行検知装置である歩行センサユニットが実行する歩行検知処理を示すフローチャート(2/2)である。
本開示の第1の実施形態にかかる歩行検知装置である歩行センサユニットを用いて様々な姿勢で足踏み歩行運動を検知する場合の配置例を示す。
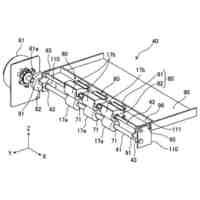
本開示の第2の実施形態にかかる歩行検知装置である歩行センサユニットの概略を示す図である。
本開示の第2の実施形態にかかる足踏み歩行運動時の4つの測距センサからの検知距離Dを、横軸を時間、縦軸を距離として表したグラフを示す。
本開示の第2の実施形態にかかる歩行検知装置である歩行センサユニットが実行する歩行検知処理を示すフローチャートである。
本開示の第3の実施形態にかかる歩行検知装置である歩行センサユニットの回路構成を示す図である。
本開示の第3の実施形態にかかる歩行検知装置である歩行センサユニットが実行する歩行検知処理を示すフローチャートである。
本開示の第4の実施形態にかかる歩行検知装置である歩行センサユニットの概略を示す図である。
本開示の第4の実施形態にかかる歩行検知装置である歩行センサユニットが実行する歩行検知処理を示すフローチャートである。
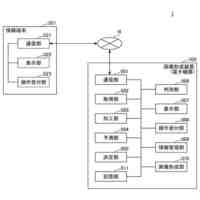
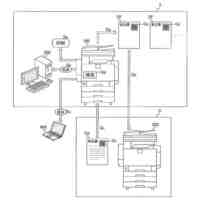
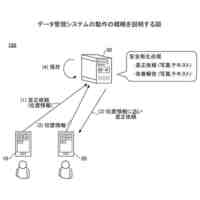
本開示の実施形態にかかる情報処理システムの一例を示す模式図である。
本開示の実施形態の第1変形例にかかる情報処理システムを示す模式図である。
本開示の実施形態の第2変形例にかかる情報処理システムを示す模式図である。
本開示の実施形態の第3変形例にかかる情報処理システムを示す模式図である。
本開示の実施形態の第4変形例にかかる情報処理システムを示す模式図である。
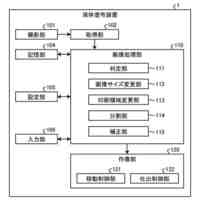
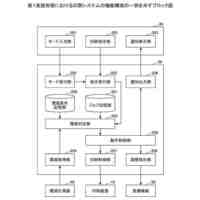
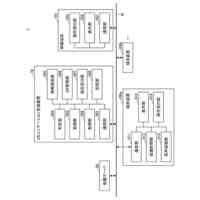
本開示の実施形態にかかる情報処理装置のハードウェア構成の一例を示すブロック図である。
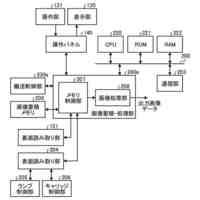
本開示の実施形態にかかる情報処理システムが備える情報処理装置の機能構成の一例を示すブロック図である。
本開示の実施形態にかかる情報処理システムの全体動作の一例を示すフローチャートである。
本開示の実施形態にかかる再生制御部による処理の一例を示すフローチャートである。
本開示の実施形態にかかる再生制御部による処理の他の例を示すフローチャートである。
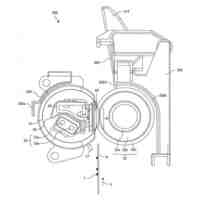
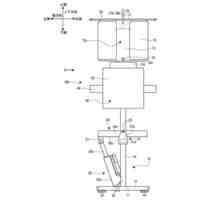
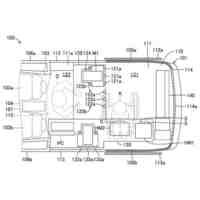
本開示の別の実施形態にかかる歩行検知装置が組み込まれた歩行支援ロボットの概略図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社リコー
画像形成装置
7日前
株式会社リコー
定着装置及び画像形成装置
8日前
株式会社リコー
画像読取装置及び画像形成装置
7日前
株式会社リコー
シート搬送装置及び画像形成装置
7日前
株式会社リコー
画像処理装置、および画像処理方法
7日前
株式会社リコー
加熱装置、定着装置及び画像形成装置
6日前
株式会社リコー
情報処理装置、開発支援システムおよびプログラム
7日前
株式会社リコー
情報提供システム、電子機器、情報提供方法、及びプログラム
今日
株式会社リコー
液体塗布装置、液体塗布システム、液体塗布方法およびプログラム
6日前
株式会社リコー
液体塗布装置、液体塗布システム、液体塗布方法およびプログラム
6日前
株式会社リコー
ファクシミリ装置、情報処理システム、情報処理方法及びプログラム
7日前
株式会社リコー
情報処理装置、情報処理システム、情報処理方法、印刷媒体、及びプログラム
8日前
株式会社リコー
情報処理装置、印刷システム、印刷方法及びプログラム
5日前
株式会社リコー
情報処理装置、情報処理方法、プログラム、情報処理システム
6日前
株式会社リコー
データ管理システム、端末装置、プログラム、データ入力方法
6日前
株式会社リコー
コミュニケーション支援システム、コミュニケーション支援装置、コミュニケーション支援方法、及びプログラム
8日前
株式会社リコー
画像処理方法、プログラム、画像処理装置および画像処理システム
1日前
個人
健康器具
4か月前
個人
歯茎みが品
5か月前
個人
鼾防止用具
4か月前
個人
嚥下鍛錬装置
9日前
個人
白内障治療法
4か月前
個人
洗井間専家。
3か月前
個人
マッサージ機
5か月前
個人
導電香
5か月前
個人
脈波測定方法
4か月前
個人
脈波測定方法
5か月前
個人
バッグ式オムツ
29日前
個人
クリップ
6か月前
個人
矯正椅子
1か月前
個人
ホバーアイロン
3か月前
個人
歯の修復用材料
23日前
個人
片足歩行支援具
6か月前
個人
車椅子持ち上げ器
4か月前
個人
眼科診療車
6か月前
個人
口内洗浄具
5か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ