TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025100550
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2025040141,2022537082
出願日
2025-03-13,2020-12-18
発明の名称
ロボット気管支鏡検査ナビゲーションのシステム及び方法
出願人
ノア メディカル コーポレーション
代理人
個人
,
個人
,
個人
,
個人
主分類
A61B
34/20 20160101AFI20250626BHJP(医学または獣医学;衛生学)
要約
【課題】ロボット内視鏡装置を自動レジストレーションする方法を提供する。
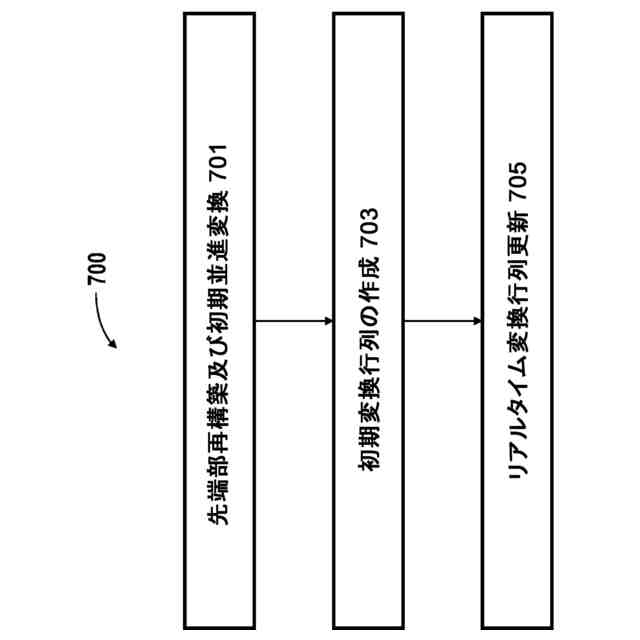
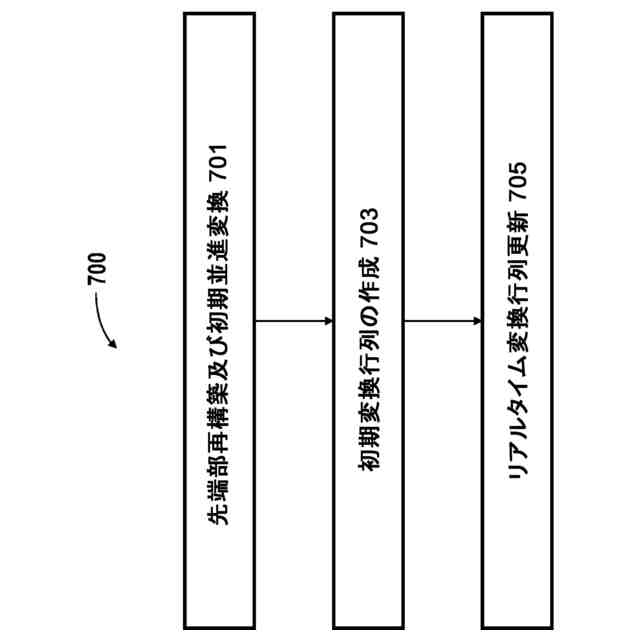
【解決手段】方法は、(a)場所センサを使用して収集された第1の組のセンサデータに少なくとも部分的に基づいて、ロボット内視鏡装置の向きと場所センサの向きとの間の第1の変換を生成することと、(b)第1の変換及び第2の組のセンサデータに少なくとも部分的に基づいて、ロボット内視鏡装置の座標系と解剖学的管腔網を表すモデルの座標系との間の第2の変換を生成することと、(c)第3の組のセンサデータに少なくとも部分的に基づいて、更新アルゴリズムを使用して第2の変換を更新することとを含む。
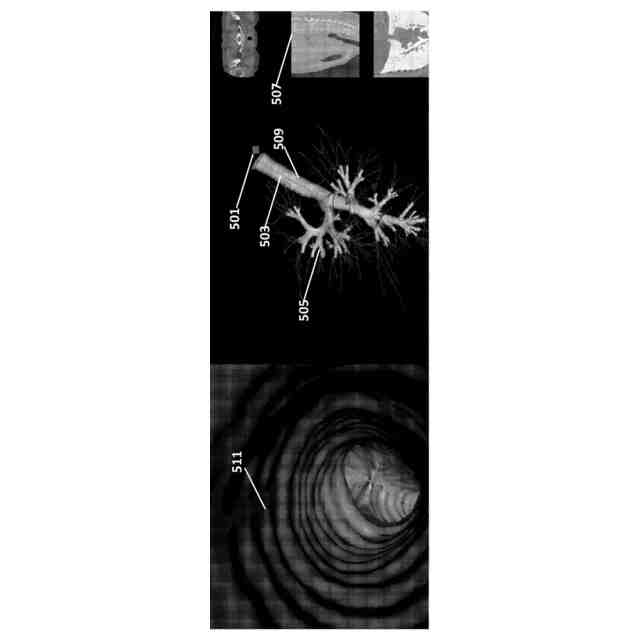
【選択図】図7
特許請求の範囲
【請求項1】
ロボット内視鏡装置をナビゲートする方法であって、
(a)場所センサを使用して収集された第1の組のセンサデータに少なくとも部分的に基づいて、前記ロボット内視鏡装置の向きと前記場所センサの向きとの間の第1の変換を生成することと、
(b)前記第1の変換及び第2の組のセンサデータに少なくとも部分的に基づいて、前記ロボット内視鏡装置の座標系と解剖学的管腔網を表すモデルの座標系との間の第2の変換を生成することと、
(c)第3の組のセンサデータに少なくとも部分的に基づいて、更新アルゴリズムを使用して前記第2の変換を更新することと、
を含む方法。
続きを表示(約 650 文字)
【請求項2】
前記更新アルゴリズムは、高速間隔再計算動作及び低速間隔再計算動作を含む、請求項1に記載の方法。
【請求項3】
前記高速間隔再計算動作は、(i)前記第3の組のセンサデータからサンプリングされたデータのサブセットを使用して、第1の組の関連性を計算することと、(ii)第1の組の関連性を第2の組の関連性と結合して、(b)において前記第2の変換を生成することとを含む、請求項2に記載の方法。
【請求項4】
前記結合された第1及び第2の組の関連性を使用して点群を計算することを更に含む、請求項3に記載の方法。
【請求項5】
前記低速間隔再計算動作は最近傍アルゴリズムを含む、請求項2に記載の方法。
【請求項6】
前記低速間隔再計算動作は、前記第3の組のセンサデータのみを使用して前記第2の変換を更新することを含む、請求項2に記載の方法。
【請求項7】
前記場所センサは電磁センサである、請求項1に記載の方法。
【請求項8】
前記解剖学的管腔網を表すモデルの前記座標系は、術前撮像システムを使用して生成される、請求項1に記載の方法。
【請求項9】
前記ロボット内視鏡装置は使い捨てカテーテル組立体を備える、請求項1に記載の方法。
【請求項10】
前記場所センサは、前記ロボット内視鏡装置の先端部に配置される、請求項1に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
参照
[0001] 本願は、2019年12月19日出願の米国仮特許出願第62/950,740号及び2020年10月13日出願の米国仮特許出願第63/091,283号の優先権を主張するものであり、これらの各仮特許出願は参照により本明細書に全体的に援用される。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
発明の背景
[0002] 肺がんの早期診断は極めて重要である。肺がんの5年生存率は約18%であり、次の3つの最も罹患率の高いがんよりも大幅に低い:乳がん(90%)、大腸がん(65%)、及び前立腺がん(99%)。2018年、合計で142,000人が肺がんによって死亡したと記録された。
【0003】
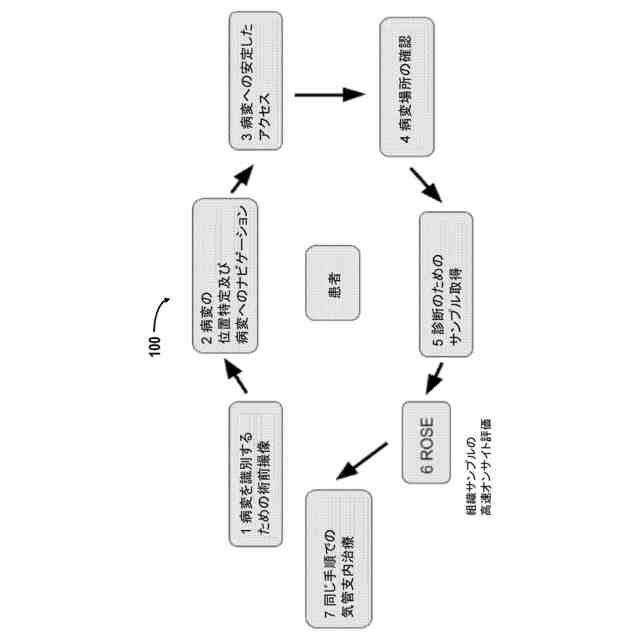
[0003] 一般に、典型的な肺がんの診断及び外科治療プロセスは、医療提供者によって使用される技法、臨床プロトコール、及び臨床現場に応じて劇的に変わり得る。一貫しないプロセスは、がんの診断を遅らせるとともに、患者及び医療システムに高いコストを課すおそれがある。
【0004】
[0004] 内視鏡(例えば気管支鏡検査)等のこれらの医療処置は、診断及び/又は治療目的で患者の管腔(例えば気道)内部にアクセスして可視化することを含み得る。処置中、診断及び/又は治療のために、例えば内視鏡等の可撓性管状器具を患者の体内に挿入し得、機器を内視鏡に通して識別された組織部位に到達させることができる。
【発明の概要】
【0005】
発明の概要
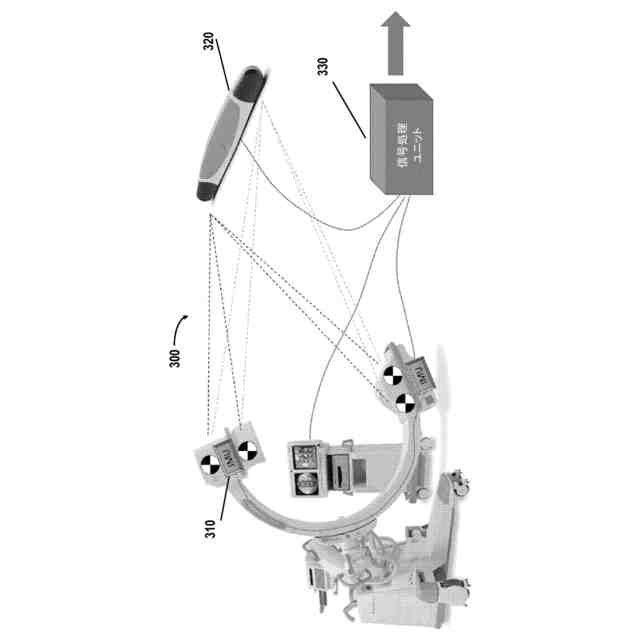
[0005] 内視鏡は、身体疾患(例えば早期肺がん診断及び治療)等の種々の症状の診断及び治療に膨大な用途を有する。内視鏡ナビゲーションシステムは、例えば適応調整確率を通してモデリングされる様々な検知モダリティ(例えばカメラ撮像データ、電磁(EM)位置データ、ロボット位置データ等)を使用し得る。ナビゲーション手法は、内視鏡の先端部の追跡を開始するために、内視鏡の先端部が気道に対してどこにあるかの初期推定に依存し得る。幾つかの内視鏡技法は、患者の生体構造の三次元(3D)モデル並びにEM場及び位置センサを使用したガイドナビゲーションを含み得る。処置に先立ち、3Dモデルの仮想空間、3Dモデルによって表される患者の生体構造の物理的空間、及びEM場間の精密なアラインメント(例えばレジストレーション)は未知であり得る。したがって、レジストレーションの生成に先立ち、患者の生体構造内の内視鏡の位置を3Dモデル内の対応する場所に精密にマッピングすることはできない。
【0006】
[0006] 気管支鏡検査のナビゲーションは、不正確なレジストレーションに起因して困難なことがある。特に、現在のレジストレーション手順は時間がかかるとともにぎこちなく、又は人間の入力によって影響される一貫しない結果を生み出すおそれがある。現在のレジストレーション手順は、推定初期レジストレーションを生成し、次いで処置中、初期レジストレーションを改良又は更新することを含み得る。例えば、現在のレジストレーション方法は、リアルタイムセンサデータからのサンプリングによってナビゲーションシステムへの変更を補償し得る。しかしながら、デバイスは長期動作中に駆動され、より多くの入力データがシステムによって収集されるにつれて、計算時間は劇的に長くなる。さらに、現在のレジストレーション手順は満足のいくオンライン更新能力を有さず、レジストレーション精度が損なわれることに繋がるおそれがある。例えば、現在のレジストレーション手順は局所変化に適応することができないことがあり、不正確なレジストレーションアルゴリズムに繋がるおそれがある。例えば、局所変化(例えば局所の小さな機械的変形に起因して)を正確には反映しない、サンプリングされたデータセットが通常、レジストレーションアルゴリズム(例えば変換)に大域的更新を行うのに使用される。別の例では、現在のレジストレーションアルゴリズムは、内視鏡が所定の経路に沿って移動しない場合、不良な変換精度を有し得る(例えば気道の中心線の切除等)。
【課題を解決するための手段】
【0007】
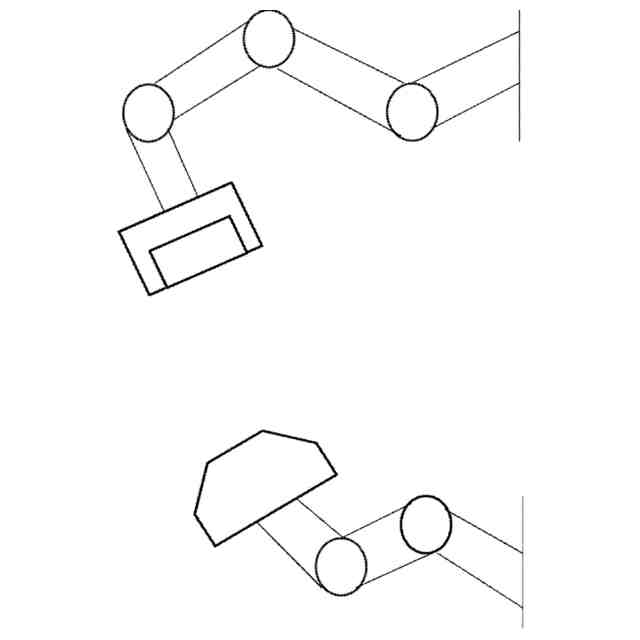
[0007] 本明細書で認識されるのは、信頼性及び費用効率性を改善して外科処置又は診断動作を実行することができる侵襲性が最小のシステムへの必要性である。本明細書で認識されるもう一つの必要性は、レジストレーション時間を短縮しながらレジストレーション精度を上げることができる、改良されたレジストレーションアルゴリズムについてのものである。本開示は、標準化された早期肺がんの診断及び治療を低コストで可能にするシステム及び方法を提供する。本開示は、がんの早期ステージ診断及び治療のための手頃でより費用効率的な方法及びシステムを提供する。本発明の幾つかの実施形態では、ロボット気管支鏡検査の少なくとも一部分は使い捨てである。例えば、外科実行性能及び機能は保持しながら、カテーテル部は低コストで使い捨てであるように設計し得る。さらに、提供されるロボット気管支鏡検査システムには、追加コストを導入せずに、気管支、肺等の届くのが難しい組織にアクセスする能力が設計される。
【0008】
[0008] 適応ナビゲーションアルゴリズムは、3Dモデルの座標系(例えばモデルの生成に使用されるCTスキャナの座標系)とEM場(例えばEM場生成器)の座標系との間のレジストレーション又はマッピングをオンザフライ更新性能で識別することが可能であり得る。
【0009】
[0009] 一態様では、ロボット内視鏡装置をナビゲートする方法が提供される。本方法は、(a)場所センサを使用して収集された第1の組のセンサデータに少なくとも部分的に基づいて、ロボット内視鏡装置の向きと場所センサの向きとの間の第1の変換を生成することと、(b)第1の変換及び第2の組のセンサデータに少なくとも部分的に基づいて、ロボット内視鏡装置の座標系と解剖学的管腔網を表すモデルの座標系との間の第2の変換を生成することと、(c)第3の組のセンサデータに少なくとも部分的に基づいて、更新アルゴリズムを使用して第2の変換を更新することとを含む。
【0010】
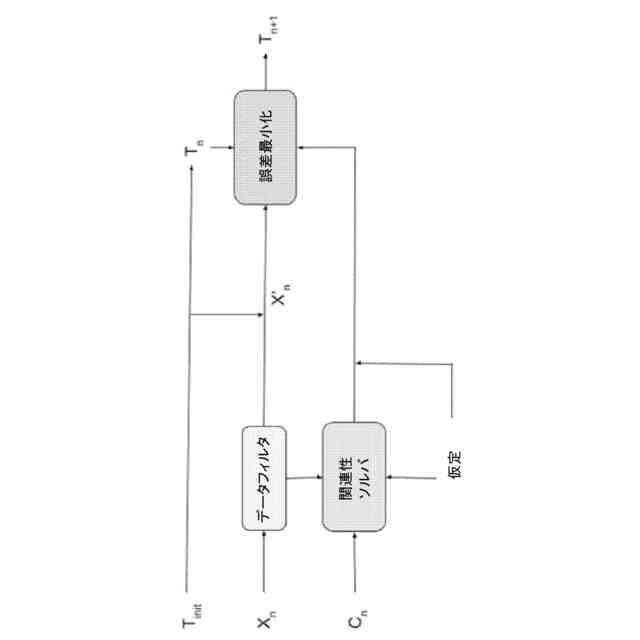
[0010] 幾つかの実施形態では、更新アルゴリズムは、高速間隔再計算動作及び低速間隔再計算動作を含む。幾つかの場合、高速間隔再計算動作は、(i)第3の組のセンサデータからサンプリングされたデータのサブセットを使用して、第1の組の関連性を計算することと、(ii)第1の組の関連性を第2の組の関連性と結合して、(b)において第2の変換を生成することとを含む。例えば、本方法は、結合された第1及び第2の組の関連性を使用して点群を計算することを更に含む。幾つかの場合、低速間隔再計算動作は最近傍アルゴリズムを含む。幾つかの場合、低速間隔再計算動作は、第3の組のセンサデータのみを使用して第2の変換を更新することを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
洗井間専家。
3か月前
個人
嚥下鍛錬装置
1日前
個人
白内障治療法
3か月前
個人
バッグ式オムツ
21日前
個人
歯の修復用材料
15日前
個人
ホバーアイロン
3か月前
個人
矯正椅子
1か月前
三生医薬株式会社
錠剤
3か月前
個人
シャンプー
2か月前
個人
陣痛緩和具
1日前
個人
車椅子持ち上げ器
3か月前
個人
歯の保護用シール
1か月前
個人
服薬支援装置
3か月前
株式会社大野
骨壷
5日前
株式会社結心
手袋
4か月前
株式会社八光
剥離吸引管
1か月前
個人
形見の製造方法
19日前
株式会社ニデック
眼科装置
21日前
個人
高気圧環境装置
26日前
株式会社ダリヤ
皮膚化粧料
3か月前
株式会社コロナ
サウナ装置
2か月前
株式会社GSユアサ
歩行器
1か月前
株式会社ダリヤ
化粧料組成物
3か月前
株式会社ノエビア
皮膚外用剤
3か月前
株式会社ダリヤ
染毛料組成物
1か月前
個人
手指と掌のマッサージ具
3か月前
個人
水素ガス吸引装置
1か月前
東ソー株式会社
歯科ブランク
28日前
株式会社ノエビア
美白化粧料
3か月前
株式会社ダリヤ
染毛料組成物
2か月前
健栄製薬株式会社
外用組成物
6日前
株式会社ダリヤ
染毛料組成物
3か月前
香栄興業株式会社
皮膚外用剤
3か月前
東ソー株式会社
歯科ブランク
28日前
株式会社東洋新薬
皮膚外用剤
1か月前
株式会社ノエビア
皮膚外用剤
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ