TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099534
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216248
出願日
2023-12-21
発明の名称
ショベルの制御システム、及びショベル
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/22 20060101AFI20250626BHJP(水工;基礎;土砂の移送)
要約
【課題】安全性を向上させる。
【解決手段】本開示の一態様に係るショベルの制御システムは、下部走行体と、前記下部走行体に対して旋回自在に搭載される上部旋回体と、を備えるショベルと、前記ショベルが走行している地面の傾斜を認識するための構成を有する傾斜認識装置と、前記地面の傾斜方向に対する前記ショベルの走行方向の傾きを、所定の角度内にさせるように前記下部走行体を制御する制御部と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
下部走行体と、前記下部走行体に対して旋回自在に搭載される上部旋回体と、を備えるショベルと、
前記ショベルが走行している地面の傾斜を認識するための構成を有する傾斜認識装置と、
前記地面の傾斜方向に対する前記ショベルの走行方向の傾きを、所定の角度内にさせるように前記下部走行体を制御する制御部と、
を備えるショベルの制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記制御部は、前記地面の傾斜方向と前記走行方向とを略平行にさせるために、前記下部走行体を制御する、
請求項1に記載のショベルの制御システム。
【請求項3】
前記制御部は、前記地面の傾斜角度が所定の閾値より低い場合に、前記所定の角度内にさせるための前記下部走行体の制御を抑制する、
請求項1に記載のショベルの制御システム。
【請求項4】
前記制御部は、前記地面が、略水平面から、所定の傾斜角度を有する面に切り替わる際に、当該所定の傾斜角度を有する前記地面の傾斜方向に対する前記走行方向を前記所定の角度内にさせるために前記下部走行体を制御する、
請求項1に記載のショベルの制御システム。
【請求項5】
前記制御部は、前記地面を前記ショベルが走行している間に、前記傾斜認識装置により取得された情報によって前記傾斜方向に対する前記走行方向の傾きが前記所定の角度以上になったことを認識された場合に、前記所定の角度内にさせるために前記下部走行体を制御するように構成されている、
請求項1に記載のショベルの制御システム。
【請求項6】
前記傾斜認識装置は、前記上部旋回体の旋回角度を検出する旋回角度センサと、前記上部旋回体の傾斜状態を検出する機体傾斜センサとを含み、
前記制御部は、前記上部旋回体の傾斜状態と前記旋回角度とに基づいて、前記地面の傾斜方向に対する前記ショベルの走行方向の傾きを算出する、
請求項1に記載のショベルの制御システム。
【請求項7】
前記傾斜認識装置は、前記地面の傾斜が表された所定の座標系の地図情報を記憶する記憶媒体と、前記所定の座標系における前記ショベルの位置情報を取得する測位装置と、を含み、
前記制御部は、前記地図情報と、前記位置情報と、に基づいて、前記下部走行体が存在する前記地面の傾斜角度と、前記ショベルの走行方向とを認識する、
請求項1に記載のショベルの制御システム。
【請求項8】
前記傾斜認識装置は、前記ショベルの周囲を検出する空間認識装置を含み、
前記制御部は、前記空間認識装置による検出結果から、前記ショベルが走行している前記地面の傾斜の切り替わりを認識する、
請求項1に記載のショベルの制御システム。
【請求項9】
下部走行体と、
前記下部走行体に対して旋回自在に搭載される上部旋回体と、
当該ショベルが走行している地面が傾斜している旨を認識するための構成を有する傾斜認識装置と、
前記地面の傾斜方向に対する前記ショベルの走行方向の傾きを、所定の角度内にさせるように前記下部走行体を制御する制御部と、
を備えるショベル。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ショベルの制御システム、及びショベルに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来から、ショベルは様々な作業現場で用いられる。このため、ショベルは傾斜地で走行することも多い(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-51066号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された技術は、登坂走行時や降坂走行時におけるフロント作業機の先端を地面に接触させることで、転倒を抑制して、円滑に走行動作を行っている。しかしながら、転倒を抑制する技術は、特許文献1に技術にされるものではなく、他の手法を用いてもよい。
【0005】
本発明の一態様は、下部走行体を制御することで、安全性の向上を実現させる技術を提案する。
【課題を解決するための手段】
【0006】
本発明の一態様に係るショベルの制御システムは、下部走行体と、前記下部走行体に対して旋回自在に搭載される上部旋回体と、を備えるショベルと、前記ショベルが走行している地面の傾斜を認識するための構成を有する傾斜認識装置と、前記地面の傾斜方向に対する前記ショベルの走行方向の傾きを、所定の角度内にさせるように前記下部走行体を制御する制御部と、を備える。
【発明の効果】
【0007】
本発明の一態様によれば、地面の傾斜方向に対してショベルの走行方向が傾いている場合に、下部走行体を制御することで、安全性の向上を実現する。
【図面の簡単な説明】
【0008】
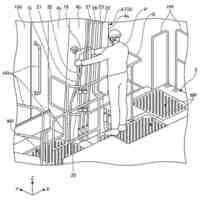
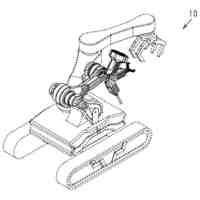
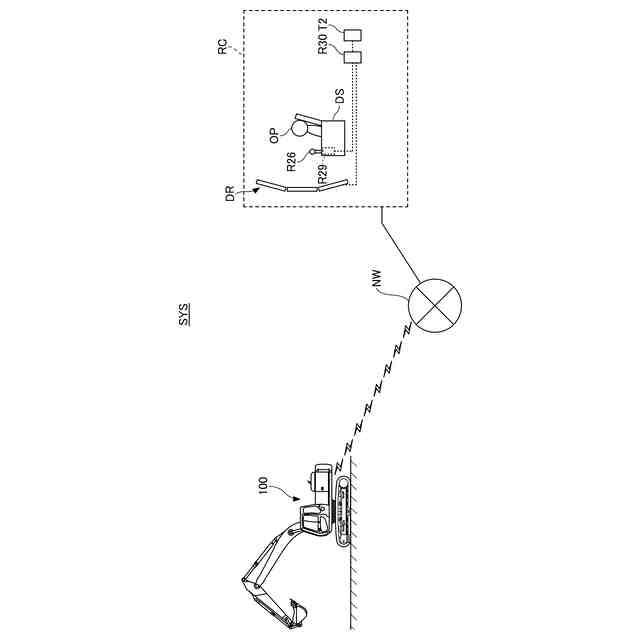
第1の実施形態に係るショベルの遠隔操作システムの構成例を示す概略図である。
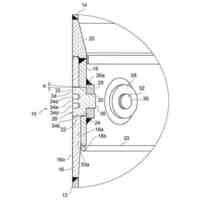
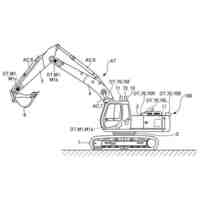
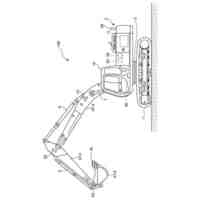
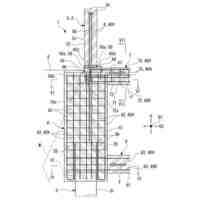
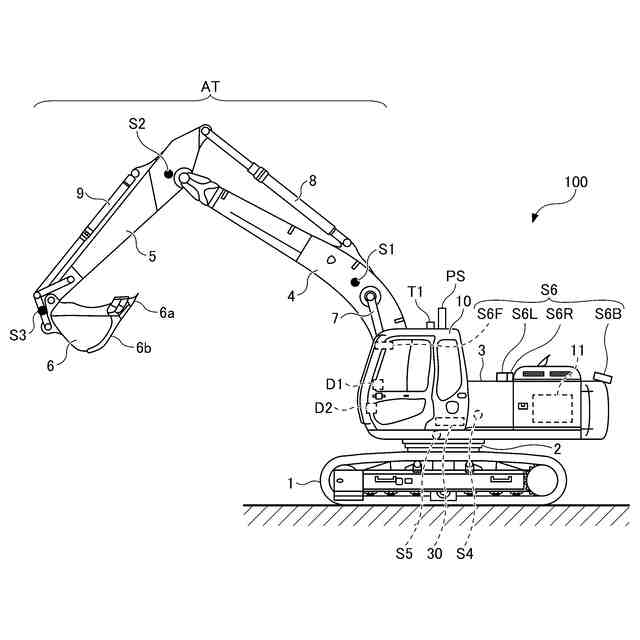
第1の実施形態に係るショベルの側面図である。
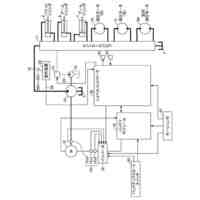
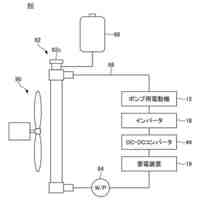
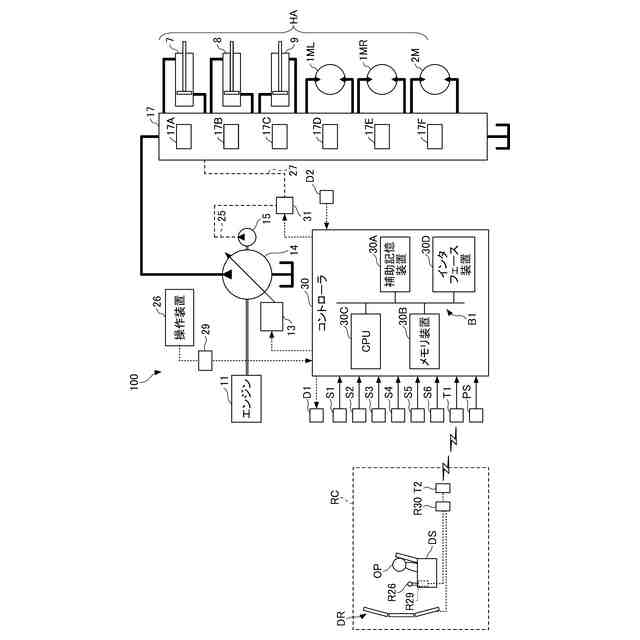
第1の実施形態に係るショベル及び遠隔操作室のハードウェア構成の一例を示すブロック図である。
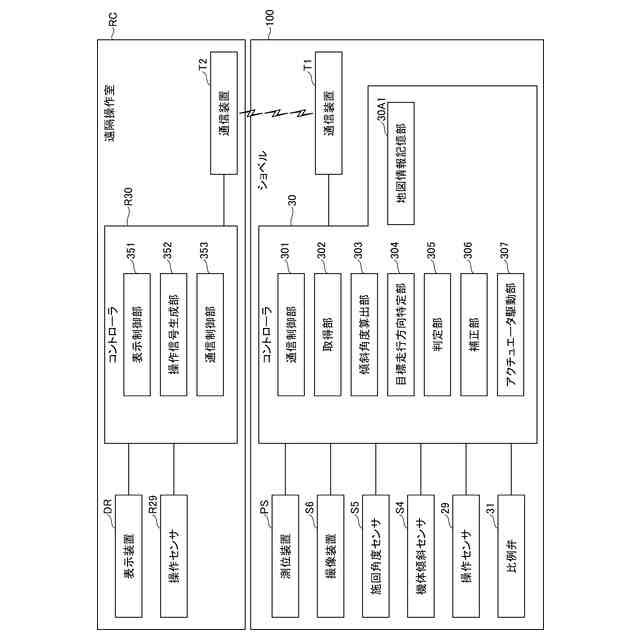
第1の実施形態に係る遠隔操作システムの構成例を示す機能ブロック図である。
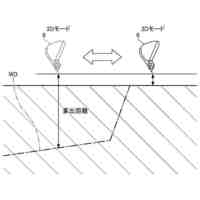
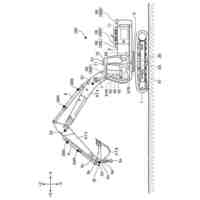
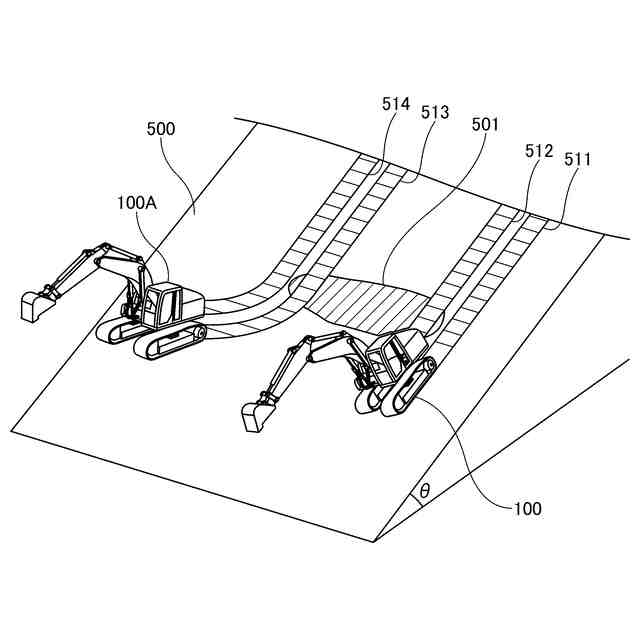
第1の実施形態に係るコントローラによるショベルの下部走行体の制御を示した説明図である。
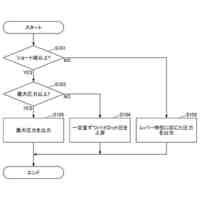
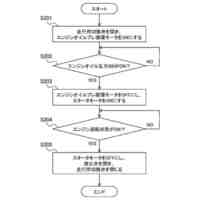
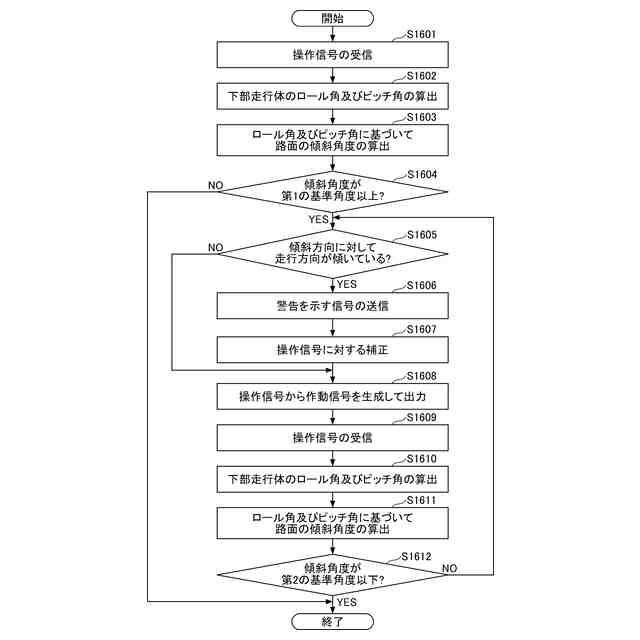
第1の実施形態に係るコントローラにより、傾斜している地面をショベルが走行するための処理手順を示したフローチャートである。
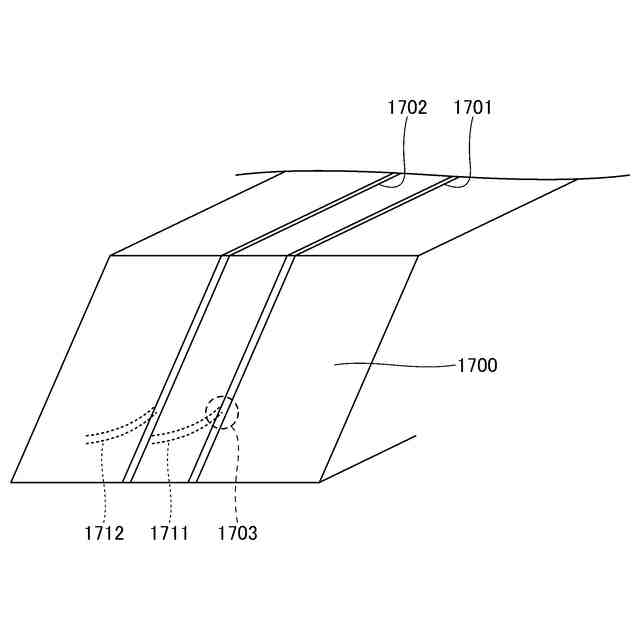
第1の実施形態に係るコントローラが下部走行体の制御を行った場合のクローラの走行軌跡を示した説明図である。
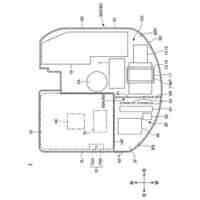
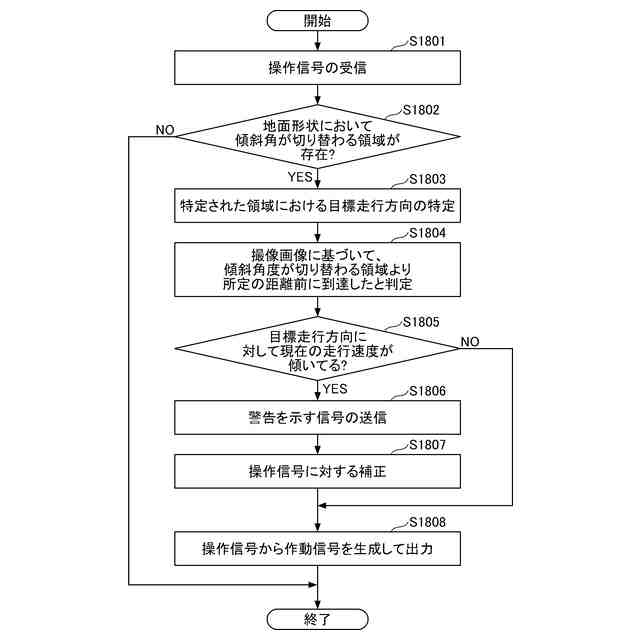
第1の実施形態に係るコントローラにより、地面の傾斜が切り替わる前にショベル100が走行するための処理手順を示したフローチャートである。
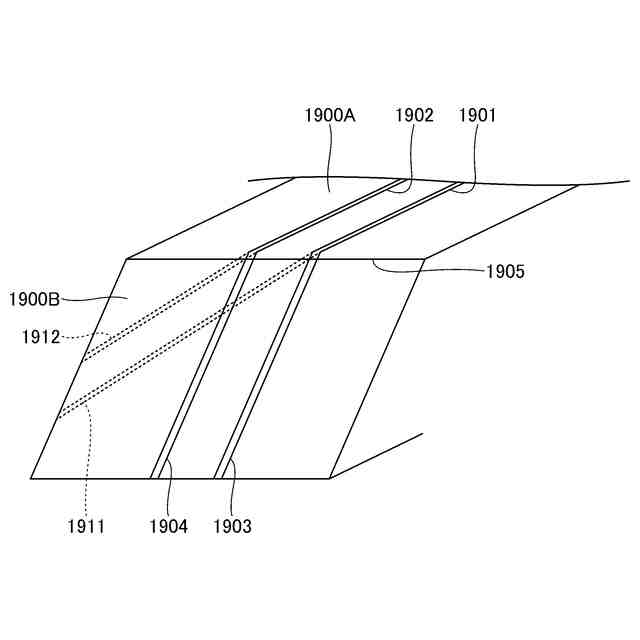
第1の実施形態に係るコントローラが下部走行体の制御を行った場合のクローラの走行軌跡を示した説明図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面を参照して説明する。また、以下で説明する実施形態は、発明を限定するものではなく例示であって、実施形態に記述される全ての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。なお、各図面において同一の又は対応する構成には同一の又は対応する符号を付し、説明を省略することがある。
【0010】
以下、本発明の実施形態では、作業機械の一例としてショベルを用いる例について説明するが、ショベルに制限するものではない。建設機械、標準機、応用機、林業機械、又は油圧ショベルをベースとした搬送機械に適用してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
耐震原子炉設備
12日前
FKS株式会社
擁壁
17日前
株式会社forch
土採取装置
18日前
鹿島建設株式会社
基礎構造
11日前
株式会社竹中工務店
建築方法
9日前
株式会社クボタ
作業車
3日前
株式会社富田製作所
継手部構造
11日前
住友建機株式会社
ショベル
3日前
住友建機株式会社
作業機械
4日前
住友建機株式会社
ショベル
3日前
住友建機株式会社
ショベル
3日前
住友建機株式会社
ショベル
10日前
住友建機株式会社
作業機械
2日前
住友建機株式会社
ショベル
24日前
住友建機株式会社
ショベル
16日前
住友建機株式会社
ショベル
2日前
住友建機株式会社
ショベル
16日前
住友建機株式会社
ショベル
16日前
株式会社テノックス九州
地盤改良方法
23日前
住友建機株式会社
電動ショベル
23日前
株式会社クボタ
作業車両
9日前
日本車輌製造株式会社
建設機械
2日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
建設機械
11日前
株式会社クボタ
作業機
11日前
ナブテスコ株式会社
ショベルカー
23日前
住友重機械工業株式会社
ショベル
3日前
住友重機械工業株式会社
ショベル
17日前
大仲建設株式会社
スコップ
9日前
住友重機械工業株式会社
ショベル
5日前
エバタ株式会社
下水道施設の再構築方法
16日前
大成建設株式会社
杭基礎構造
17日前
戸田建設株式会社
杭頭空間形成装置
5日前
ヤンマーホールディングス株式会社
作業機械
10日前
日鉄建材株式会社
カゴ枠、及び河川堤防の補強構造
24日前
株式会社小松製作所
作業機械
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ