TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025099234
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023215731
出願日
2023-12-21
発明の名称
ロボット制御装置
出願人
フタバ産業株式会社
代理人
名古屋国際弁理士法人
主分類
B25J
9/22 20060101AFI20250626BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットを実際の作業位置まで移動させることなく、設置誤差などによって生じる位置ずれ量を計測できるようにする。
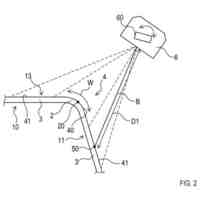
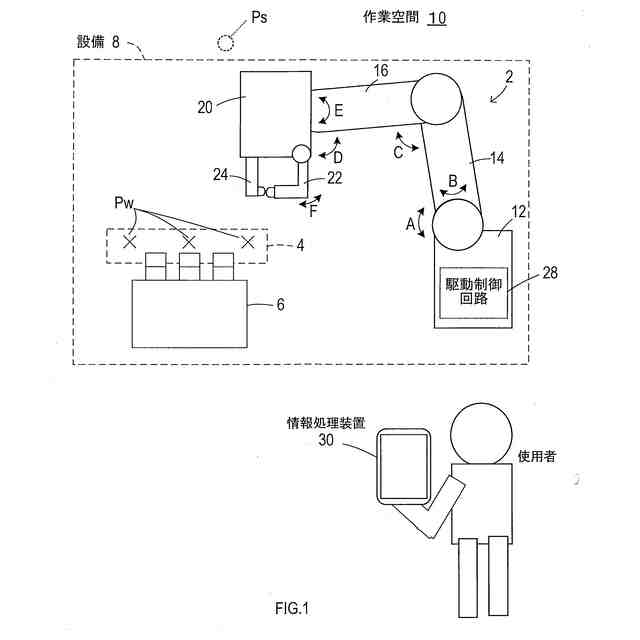
【解決手段】ロボット制御装置は、3Dデータ記憶部と、動作データ記憶部と、撮像部と、表示部と、表示制御部と、ロボット制御部とを備える。撮像部は、設備、ロボット、及びワークを含む作業空間を撮像可能であり、表示部は、撮像部にて撮像された実画像を表示可能である。表示制御部は、作業空間の実画像内でワークに対する作業領域から離れた所定の基準位置を特定し、基準位置にてロボットを作業させたときの作業具の仮想画像を実画像に重畳して表示させ、ロボット制御部は、ロボットの作業具を作業空間内の基準位置まで移動させる。
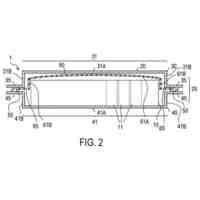
【選択図】図2
特許請求の範囲
【請求項1】
ワークに対する所定の作業を行う作業具を備えたロボットの動作を制御するロボット制御装置であって、
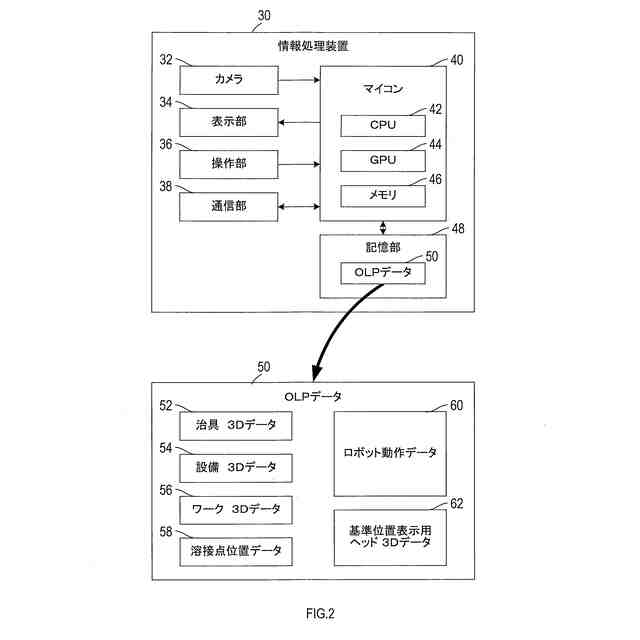
前記ロボットの3Dデータ、及び、前記ロボットが設置される作業空間内の設備の3Dデータ、を含む3Dデータが記憶された3Dデータ記憶部と、
前記ワークに対する作業を実施するために予め教示された前記ロボットの動きを表す動作データが記憶された動作データ記憶部と、
前記設備、前記ロボット、及び、前記ワークを含む前記作業空間を撮像可能に構成された撮像部と、
前記撮像部にて撮像された前記作業空間の実画像を表示可能に構成された表示部と、
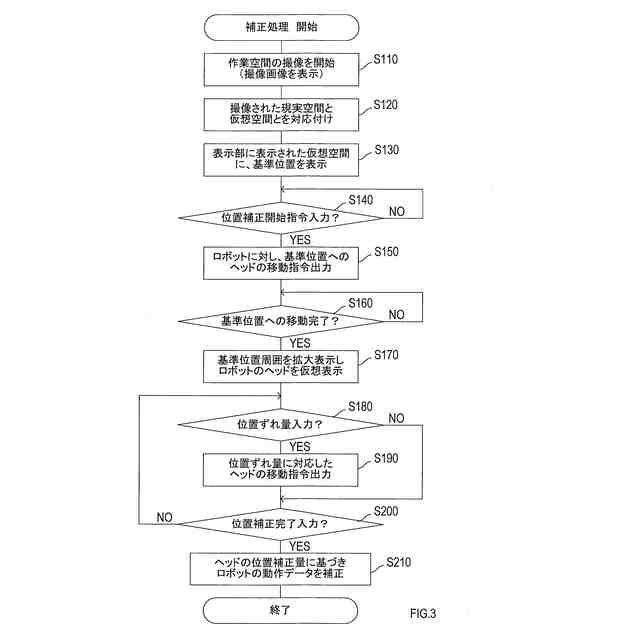
前記表示部に表示された前記作業空間内の前記設備の前記実画像と、前記設備の前記3Dデータとに基づき、前記実画像内で前記ワークに対する作業領域から離れた所定の基準位置を特定し、前記ロボットの前記3Dデータに基づき、前記ロボットの前記作業具を前記基準位置まで移動させたときの前記作業具の仮想画像を、前記表示部に表示された前記実画像に重畳して表示させるよう構成された表示制御部と、
前記動作データに基づき、前記ロボットの前記作業具を前記作業空間内の前記基準位置まで移動させて、前記作業具に対し動作位置確認用の作業を実施させるよう構成された、ロボット制御部と、
を備えた、ロボット制御装置。
続きを表示(約 600 文字)
【請求項2】
請求項1に記載のロボット制御装置であって、
前記基準位置に表示された前記作業具の前記仮想画像と前記実画像との位置ずれ量を入力可能に構成された入力部と、
前記入力部から入力された前記基準位置での前記作業具の位置ずれ量に基づき、前記ロボットによる複数の作業点で位置ずれが生じることのないよう、前記動作データを補正するよう構成された補正部と、
を備えた、ロボット制御装置。
【請求項3】
請求項2に記載のロボット制御装置であって、
前記3Dデータ記憶部には、前記ロボットによる作業対象となる前記ワークの3Dデータが記憶されており、
前記ロボット制御部は、前記補正部にて補正された前記動作データに基づき、前記ロボットを動作させて、動作検証用の作業を実施させ、
前記表示制御部は、前記ロボット制御部が、前記ロボットに対し前記動作検証用の作業を実施させているとき、前記3Dデータ記憶部に記憶された前記ワークの前記3Dデータに基づき、前記表示部に表示された前記実画像に対し、前記ワークの仮想画像を重畳して表示させる、ロボット制御装置。
【請求項4】
請求項1~請求項3の何れか1項に記載のロボット制御装置であって、
前記基準位置は、前記作業空間内で前記設備の外に設定されている、ロボット制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
ワークに対し所定の作業を行うロボットとして、作業工程順に作業位置や動きがプログラミングされた動作データに従いロボット各部を駆動制御することで、一連の作業を自動で実施するように構成されたものが知られている。また、この種のロボットの動作データをプログラミングする装置としては、例えば、特許文献1、2に記載のような、オフラインティーチング装置が知られている。
【0003】
オフラインティーチング装置は、ロボットが設置される作業空間の設備を、仮想空間として表示装置に表示させ、使用者が、その仮想空間内でロボットの作業位置や動き(移動軌跡など)を入力することで、動作データを生成できるようにしたものである。オフラインティーチング装置は、ロボットを作業環境外でオフラインプログラミング(以下、OLP)するものであることから、使用者は、現実の作業空間内でロボットを動作させることなく、動作データを生成することができる。
【先行技術文献】
【特許文献】
【0004】
WO2016/021130号公報
特開2012-24867号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、OLPにて生成された動作データを、現実の作業空間内に設置されたロボットに組み込み、ロボットを動作させると、ロボットの設置誤差などによって、ロボットによる作業位置が、使用者が指定した作業位置からずれてしまうことがある。そして、このように作業位置がずれた場合、ロボットを動作データにて実際に動作させて、作業位置での位置ずれ量を計測し、その計測結果に基づき、動作データを補正することが考えられる。
【0006】
しかし、動作データの補正のために、設置誤差が生じているロボットを、動作データを用いて実際に動作させると、ロボットが、作業空間内の設備(例えば、作業対象となるワークが固定された治具など)と干渉して、ロボットや設備の一部が破損する虞がある。また、ロボットを動作データを用いて実際に動作させて、設置誤差を検出するには、時間がかかることから、動作データ補正のための工数が増加するという問題もある。
【0007】
本開示の一局面は、OLPなどにて生成された動作データに従いロボットを制御するロボット制御装置において、ロボットを実際の作業位置まで移動させることなく、設置誤差などによって生じる位置ずれ量を計測できるようにすることを目的とする。
【課題を解決するための手段】
【0008】
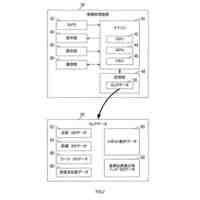
本開示の1つの態様によるロボット制御装置は、ワークに対する所定の作業を行う作業具を備えたロボットの動作を制御するロボット制御装置であって、3Dデータ記憶部と、動作データ記憶部と、撮像部と、表示部と、表示制御部と、ロボット制御部と、を備える。
【0009】
このうち、3Dデータ記憶部には、ロボットの3Dデータ、及び、ロボットが設置される作業空間内の設備の3Dデータ、を含む3Dデータが記憶されている。また、動作データ記憶部には、ワークに対する作業を実施するために予め教示されたロボットの動きを表す動作データが記憶されている。
【0010】
また、撮像部は、設備、ロボット、及び、ワークを含む、作業空間を撮像可能に構成されており、表示部は、その撮像部にて撮像された作業空間の実画像を表示可能に構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
フタバ産業株式会社
熱交換器
1か月前
フタバ産業株式会社
排気装置
1か月前
フタバ産業株式会社
熱交換器
20日前
フタバ産業株式会社
熱交換器
1か月前
フタバ産業株式会社
ブラケット
17日前
フタバ産業株式会社
ロボット制御装置
2か月前
フタバ産業株式会社
車両用電池パック
29日前
フタバ産業株式会社
消音器の製造方法
1か月前
フタバ産業株式会社
燃料改質システム
29日前
フタバ産業株式会社
管状部材の製造方法
23日前
フタバ産業株式会社
金属部材の製造方法
1か月前
フタバ産業株式会社
金属部材の製造方法
1か月前
フタバ産業株式会社
アンダーボディー部材
17日前
フタバ産業株式会社
フロア部材の製造方法
17日前
フタバ産業株式会社
排気系部品の製造方法
1か月前
フタバ産業株式会社
熱交換器及び熱交換システム
23日前
フタバ産業株式会社
焼入れ方法、及び焼入れ装置
1か月前
フタバ産業株式会社
インパネリインフォースメント
1か月前
フタバ産業株式会社
排気部品及び排気部品の製造方法
1日前
フタバ産業株式会社
プレス成形品及びプレス成形品の製造方法
17日前
フタバ産業株式会社
ボディー部材、及びボディー部材の製造方法
23日前
フタバ産業株式会社
プレス成形装置及びプレス成形品の製造方法
16日前
フタバ産業株式会社
解析装置、解析方法、及びコンピュータプログラム
28日前
フタバ産業株式会社
インシュレータの製造方法及びインシュレータの構成部品
23日前
個人
固定補助具
13日前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
搬送装置
2か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社不二越
ロボット操作装置
1日前
株式会社不二越
ロボットシステム
7日前
個人
ペグハンマおよびペグハンマ用部品
2か月前
川崎重工業株式会社
ロボット
1か月前
日本精工株式会社
締結用工具
10日前
ARMA株式会社
ジョイントフレーム
8日前
トヨタ自動車株式会社
カプラ接続治具
17日前
工機ホールディングス株式会社
作業機
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ