TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025096413
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2025063140,2020102659
出願日
2025-04-07,2020-06-12
発明の名称
地図補正システム、及び地図補正プログラム
出願人
株式会社竹中工務店
代理人
弁理士法人太陽国際特許事務所
主分類
G09B
29/00 20060101AFI20250619BHJP(教育;暗号方法;表示;広告;シール)
要約
【課題】実空間の状況を反映して地図データの精度を向上させると共に、地図データ及びBIMデータの参照管理を可能とする。
【解決手段】地図補正システムは、空間における構造物に応じたロボットの移動可能範囲を規定したロボットの種類ごとの三次元又は二次元の地図データと、制御情報を受け付けているロボットによる構造物の位置との照合結果による自己位置推定結果とを用いて、制御情報を受け付けていない他のロボットに構造物の形状を検出するように指示を行い、他のロボットが送信した自己位置推定結果を取得し、制御情報を受け付けているロボットの検出結果及び他のロボットの自己位置推定結果を用いて、制御情報を受け付けているロボットの地図データについて、構造物の状況を反映するように補正し、地図データを参照するか、または、BIMデータを参照するかが選択できるように管理する。
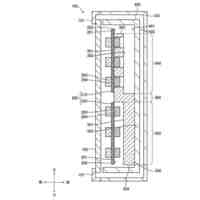
【選択図】図2
特許請求の範囲
【請求項1】
空間における構造物に応じたロボットの移動可能範囲を規定したロボットの種類ごとの三次元又は二次元の地図データと、制御情報を受け付けているロボットによる構造物の位置との照合結果による自己位置推定結果とを用いて、前記地図データと実空間との差異又は誤差を検出し、
前記差異又は誤差を検出した場合に、前記構造物の形状を特定するために、制御情報を受け付けていない他のロボットに前記構造物の形状を検出するように指示を行い、
前記他のロボットが前記構造物に対して巡回して得た自己位置推定結果であって、当該他のロボットが送信した自己位置推定結果を取得し、
制御情報を受け付けているロボットの検出結果及び前記他のロボットの障害物に対する巡回における前記他のロボットの自己位置推定結果を用いて、制御情報を受け付けているロボットの前記地図データについて、前記構造物の状況を反映するように補正し、
前記空間は建物の建設現場の実空間であり、前記構造物は、実空間の前記建物の建設現場において移動可能な構造物であって、前記建設現場の設置物、資材、及び建設用具の少なくとも何れかであり、
実際の空間における構造物の状況を反映するように補正された前記地図データを参照するか、または、前記地図データを生成するために用いた元データであるBIMデータを参照するかが選択できるように管理する、
地図補正システム。
続きを表示(約 890 文字)
【請求項2】
前記補正は、前記他のロボットの障害物に対する巡回における検出結果により、前記移動可能な構造物に関して、移動、追加、及び使用による配置の変化を反映し、かつ、前記構造物の形状を反映するように補正する請求項1に記載の地図補正システム。
【請求項3】
前記管理において、前記建物の施工中は、実際の前記建設現場の状況に応じて前記補正により更新された前記地図データを参照し、前記建物の竣工後は、前記BIMデータを参照するように設定されている、請求項1に記載の地図補正システム。
【請求項4】
空間における構造物に応じたロボットの移動可能範囲を規定したロボットの種類ごとの三次元又は二次元の地図データと、制御情報を受け付けているロボットによる構造物の位置との照合結果による自己位置推定結果とを用いて、前記地図データと実空間との差異又は誤差を検出し、
前記差異又は誤差を検出した場合に、前記構造物の形状を特定するために、制御情報を受け付けていない他のロボットに前記構造物の形状を検出するように指示を行い、
前記他のロボットが前記構造物に対して巡回して得た自己位置推定結果であって、当該他のロボットが送信した自己位置推定結果を取得し、
制御情報を受け付けているロボットの検出結果及び前記他のロボットの障害物に対する巡回における前記他のロボットの自己位置推定結果を用いて、制御情報を受け付けているロボットの前記地図データについて、前記構造物の状況を反映するように補正し、
前記空間は建物の建設現場の実空間であり、前記構造物は、実空間の前記建物の建設現場において移動可能な構造物であって、前記建設現場の設置物、資材、及び建設用具の少なくとも何れかであり、
実際の空間における構造物の状況を反映するように補正された前記地図データを参照するか、または、前記地図データを生成するために用いた元データであるBIMデータを参照するかが選択できるように管理する、
処理をコンピュータに実行させる地図補正プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットの制御に必要な地図情報の補正に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、建設現場であっても自己の位置を推定するロボットの位置推定に係る技術が知られている(例えば、特許文献1)。この技術では、計測可能な施工対象物の施工データから抽出してマッピング情報を得て、計測データと、マッピング情報とに基づいて、空間内における自己位置を算出している。
【0003】
また、移動空間内のレイアウトを変更しても容易に適用でき、導入コストが小さく、さらに、高速且つ正確に自己位置認識できる移動体に係る技術が知られている(例えば、特許文献2)。同様の技術として、移動体は自分の位置を推定し、指定された目的地まで自律的に移動制御可能として、移動体の位置を安定的に得る技術が知られている(例えば、特許文献3)。
【0004】
また、建物の施工現場ならではの事情を考慮して、当該施工現場内で精度良く自己位置を推定することが可能な自律移動装置を提供する技術が知られている(例えば、特許文献4)。この技術では、建物のうち施工現場内に存在する複数の対象部位の形状データを取得し、図面データを参照し、複数の対象部位それぞれの寸法に関する情報に基づいて、複数の対象部位の中から基準対象部位を特定している。また、図面データに含まれる基準対象部位の位置と、形状データにおける実際の基準対象部位の位置との照合結果に基づいて、施工現場内における自己位置を推定している。
【先行技術文献】
【特許文献】
【0005】
特開2018-164966号公報
特開2010-66934号公報
特開2019-125354号公報
特開2020-004231号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記特許文献1~4に記載の技術によれば、実空間におけるロボットの自己位置を精度よく推定できる。このように精度よく自己位置を推定すれば、ロボットの経路上の移動が正確、かつ、スムーズに行えると考えられる。しかし、経路を示す地図上のデータと、実際の施工現場のデータとには差異が生じる場合がある。実際の施工現場は状況に応じて資材等の配置の変更、設計変更に伴う配置変更等、様々な変化が発生するからである。そのため、単にロボットの自己位置を正確に推定できるだけでは、ロボットの移動の正確性を担保できるわけではない。
【0007】
本発明は上記事実を考慮して、実空間の状況を反映して地図データの精度を向上させると共に、地図データ及びBIMデータの参照管理を可能とすることを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の地図補正システムは、空間における構造物に応じたロボットの移動可能範囲を規定したロボットの種類ごとの三次元又は二次元の地図データと、制御情報を受け付けているロボットによる構造物の位置との照合結果による自己位置推定結果とを用いて、前記地図データと実空間との差異又は誤差を検出し、前記差異又は誤差を検出した場合に、前記構造物の形状を特定するために、制御情報を受け付けていない他のロボットに前記構造物の形状を検出するように指示を行い、前記他のロボットが前記構造物に対して巡回して得た自己位置推定結果であって、当該他のロボットが送信した自己位置推定結果を取得し、制御情報を受け付けているロボットの検出結果及び前記他のロボットの障害物に対する巡回における前記他のロボットの自己位置推定結果を用いて、制御情報を受け付けているロボットの前記地図データについて、前記構造物の状況を反映するように補正し、前記空間は建物の建設現場の実空間であり、前記構造物は、実空間の前記建物の建設現場において移動可能な構造物であって、前記建設現場の設置物、資材、及び建設用具の少なくとも何れかであり、実際の空間における構造物の状況を反映するように補正された前記地図データを参照するか、または、前記地図データを生成するために用いた元データであるBIMデータを参照するかが選択できるように管理する。これにより、実空間の状況を反映して地図データの精度を向上させると共に、地図データ及びBIMデータの参照管理を可能とする。
【発明の効果】
【0009】
本発明によれば、実空間の状況を反映して地図データの精度を向上させると共に、地図データ及びBIMデータの参照管理を可能とする、という効果が得られる。
【図面の簡単な説明】
【0010】
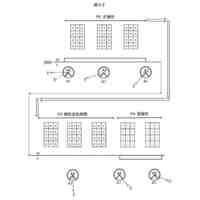
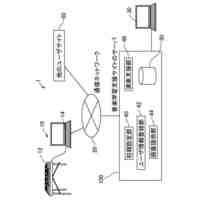
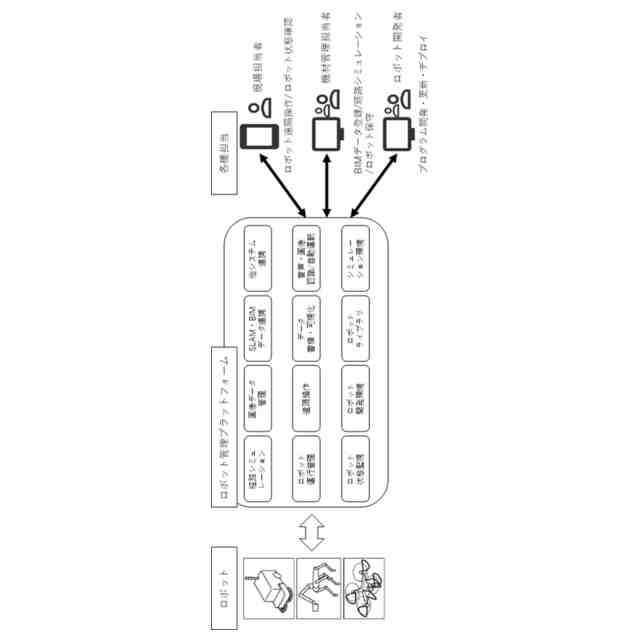
ロボット管理プラットフォームのイメージ図である。
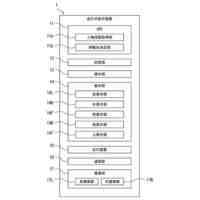
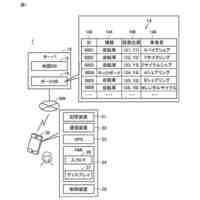
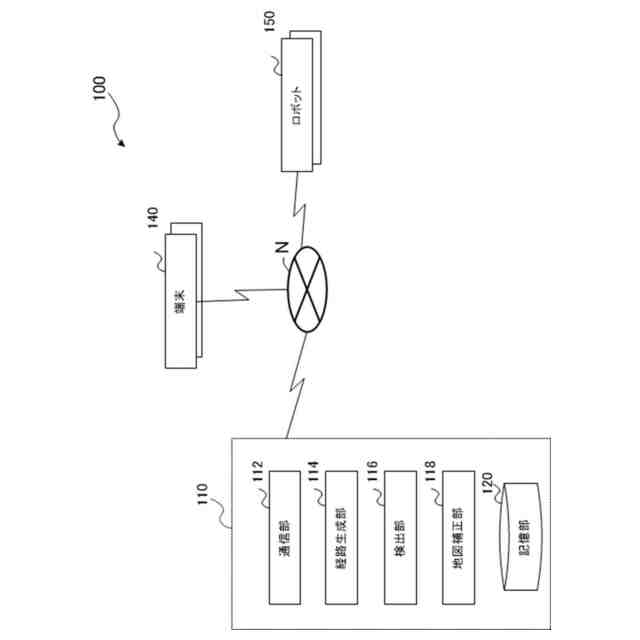
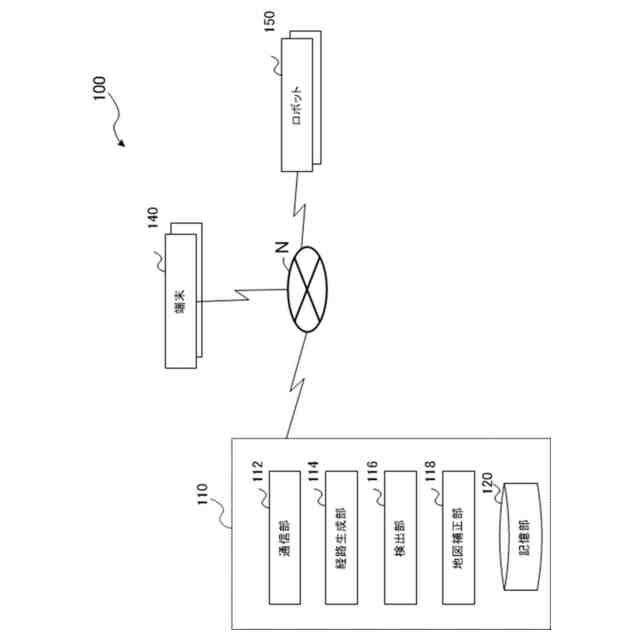
本発明の実施形態に係る地図補正システムの構成を示すブロック図である。
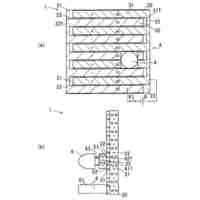
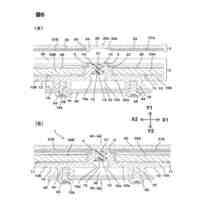
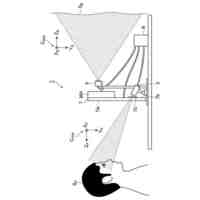
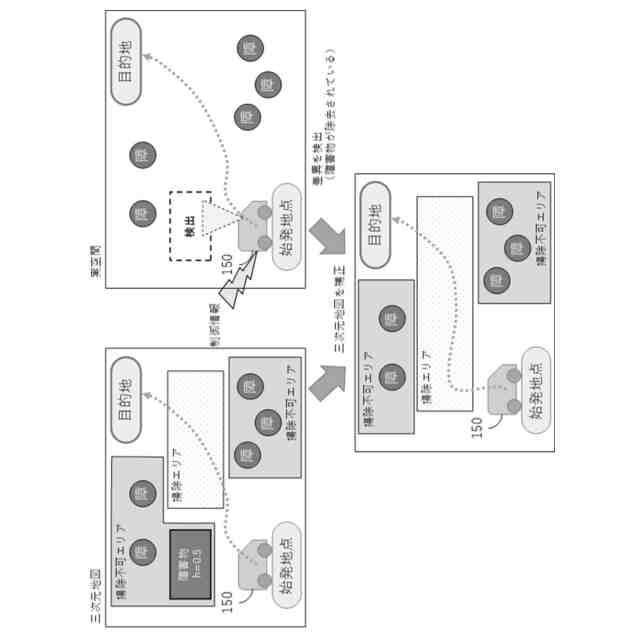
障害物が除去された場合の差異の検出及び補正の一例を示す図である。
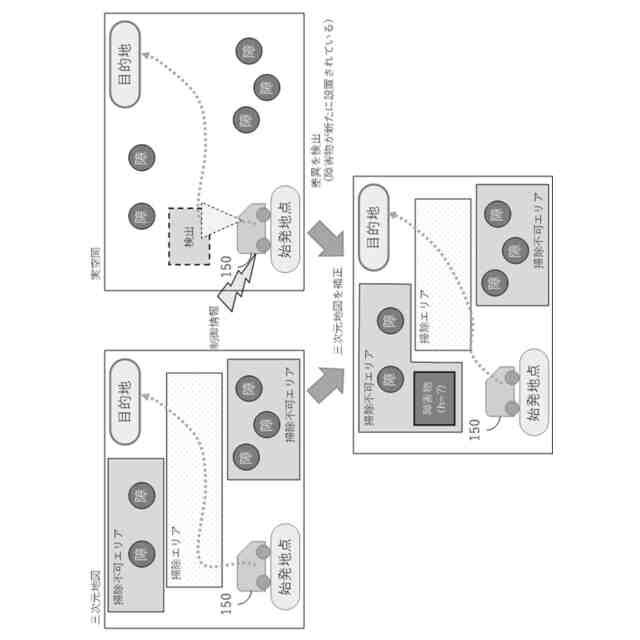
障害物が新たに設置された場合の差異の検出及び補正の一例を示す図である。
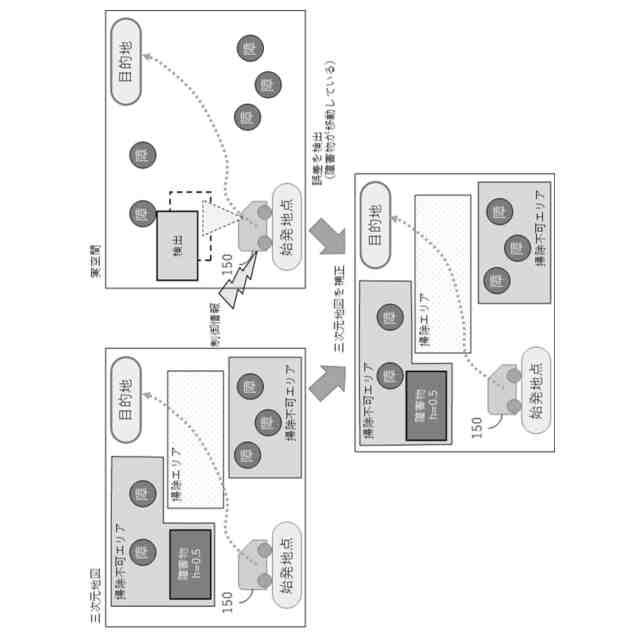
障害物が移動された場合の誤差の検出及び補正の一例を示す図である。
本発明の実施形態に係る地図補正装置における地図補正処理を示すシーケンス図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
標準学士検定
1か月前
個人
4分割正積世界地図
1か月前
日本精機株式会社
発光装置
24日前
日本精機株式会社
発光装置
24日前
個人
地熱を利用した集客装置
1か月前
個人
注射針穿刺訓練用モデル
1か月前
シャープ株式会社
表示装置
16日前
シャープ株式会社
表示装置
17日前
ブジョングループ
電子ラベル装置
1か月前
シャープ株式会社
表示装置
29日前
個人
広告設置構造及び広告支持部材
22日前
EID SYSTEM株式会社
ラベル
1か月前
EID SYSTEM株式会社
ラベル
1か月前
ニチレイマグネット株式会社
磁着式電飾装置
1か月前
矢崎総業株式会社
表示装置
1か月前
中国電力株式会社
危険予知訓練装置
9日前
シャープ株式会社
走行式表示装置
1か月前
医療法人 鶴岡クリニック
医療実習用人体模型
1か月前
厦門天馬顕示科技有限公司
走査回路
3日前
日本放送協会
立体配線を用いた電子ディスプレイ
21日前
株式会社マキタ
作業機及び表示器
11日前
個人
利き目変更用具、及び利き目変更用具の使用方法
22日前
日本放送協会
配線構造
1か月前
artience株式会社
フレキシブルディスプレイ用補強板
9日前
シャープ株式会社
表示制御装置及び表示制御方法
8日前
株式会社ジャパンディスプレイ
表示装置
8日前
アルプスアルパイン株式会社
表示装置
1か月前
アルプスアルパイン株式会社
表示装置およびその製造方法
1日前
トヨタ自動車株式会社
地図表示装置
17日前
大日本印刷株式会社
広告表示体
4日前
株式会社ヴァレオジャパン
表示装置
4日前
株式会社Freedom Freaks
音楽学習支援システム
1日前
株式会社デンソーテン
ディスプレイ装置
11日前
キヤノン株式会社
情報処理システム、電子採点方法、プログラム
25日前
大王製紙株式会社
アテンションラベル
1か月前
国立大学法人静岡大学
画像処理システム及び画像処理方法
18日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ