TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025096108
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2024066710
出願日
2024-04-17
発明の名称
モビリティ用走行制御システムおよび方法
出願人
現代自動車株式会社
,
HYUNDAI MOTOR COMPANY
,
起亞株式会社
,
KIA CORPORATION
代理人
弁理士法人共生国際特許事務所
主分類
B60W
30/10 20060101AFI20250619BHJP(車両一般)
要約
【課題】路面の表面情報による実際走行経路を獲得してモータの速度制御およびトルク制御を行うモビリティ用走行制御システムおよび方法を提供する。
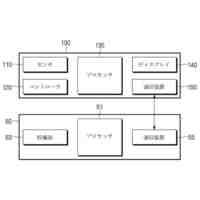
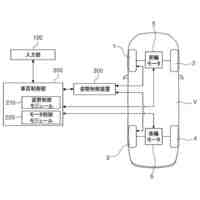
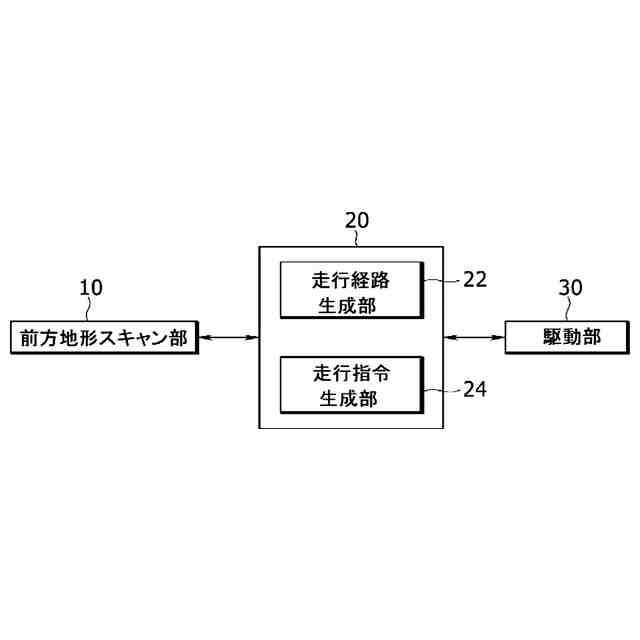
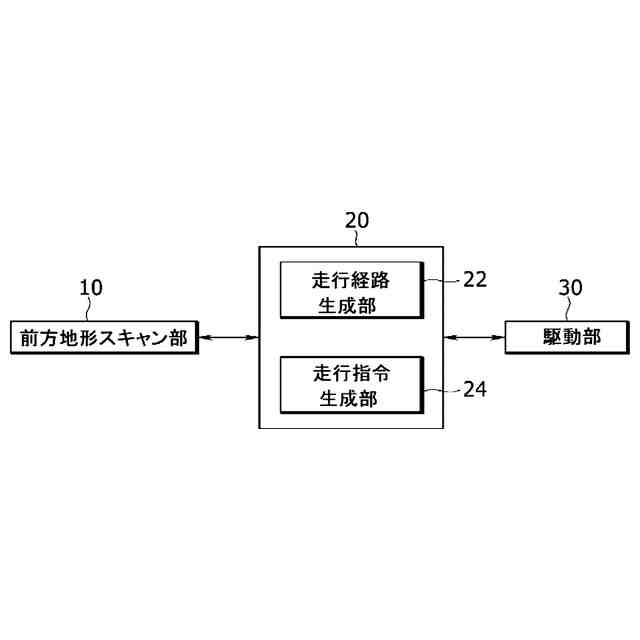
【解決手段】モビリティの前方のライダーポイントデータを検出し、モビリティの前方の表面イメージをスキャンするように構成された前方地形スキャン部と、モビリティを移動させる動力を提供する駆動部と、各車輪の動半径を含むモビリティの仕様が保存されており、ライダーポイントデータを用いてモビリティの走行経路を生成し、モビリティの前方の表面イメージに基づいて表面の深さデータを検出し、各車輪の走行経路内表面の深さデータとモビリティの各車輪の動半径を用いて各車輪の実際走行経路を獲得し、各車輪の実際走行経路のための走行指令を生成し、生成された走行指令に従って駆動部の作動を制御するように構成された制御器と、を含む。
【選択図】 図1
特許請求の範囲
【請求項1】
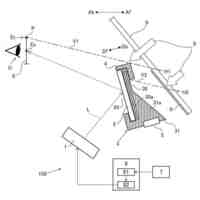
モビリティの前方のライダーポイントデータを検出し、モビリティの前方の表面イメージをスキャンするように構成された前方地形スキャン部と、
モビリティを移動させる動力を提供する駆動部と、
各車輪の動半径を含むモビリティの仕様が保存されており、ライダーポイントデータを用いてモビリティの走行経路を生成し、モビリティの前方の表面イメージに基づいて表面の深さデータを検出し、各車輪の走行経路内表面の深さデータとモビリティの各車輪の動半径を用いて各車輪の実際走行経路を獲得し、各車輪の実際走行経路のための走行指令を生成し、前記生成された走行指令に従って駆動部の作動を制御するように構成された制御器と、
を含むことを特徴とするモビリティ用走行制御システム。
続きを表示(約 1,100 文字)
【請求項2】
前記制御器は、一つの車輪の走行経路が走行するのに適しているかを判断し、複数の車輪に対する走行経路が走行するのに適しているかを判断するようにさらに構成されたことを特徴とする請求項1に記載のモビリティ用走行制御システム。
【請求項3】
前記制御器は、一つの車輪の走行経路が走行するのに適し複数の車輪に対する走行経路が走行するのに適していると判断することに反応して各車輪の実際走行経路のための走行指令を生成するようにさらに構成されたことを特徴とする請求項2に記載のモビリティ用走行制御システム。
【請求項4】
前記一つの車輪の走行経路が走行するのに適していないと判断するかまたは複数の車輪に対する走行経路が走行するのに適していないと判断することに反応して走行経路を再生成するようにさらに構成されたことを特徴とする請求項2に記載のモビリティ用走行制御システム。
【請求項5】
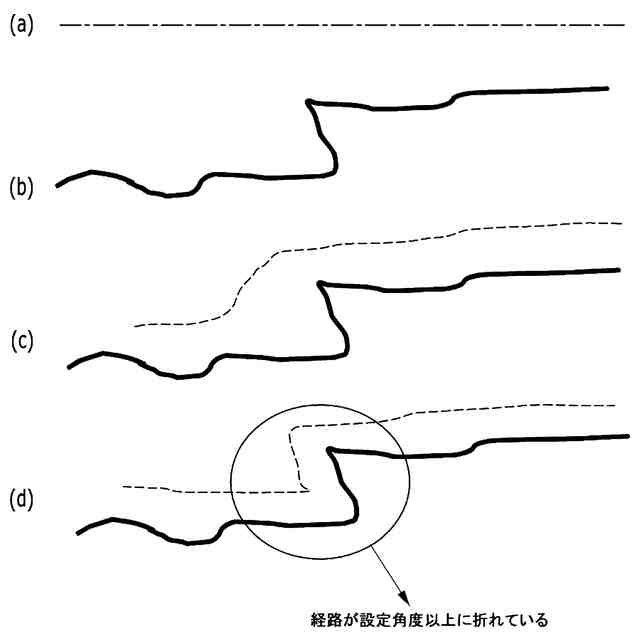
前記制御器は、一つの車輪の実際走行経路が予め設定された角度以上に折れると予想されることに反応して一つの車輪の走行経路が走行するのに適していないと判断するように構成されたことを特徴とする請求項2に記載のモビリティ用走行制御システム。
【請求項6】
前記制御器は、車輪の間に位置する路面がモビリティの底面と衝突すると予想されることに反応して複数の車輪の走行経路が走行するのに適していないと判断するように構成されたことを特徴とする請求項2に記載のモビリティ用走行制御システム。
【請求項7】
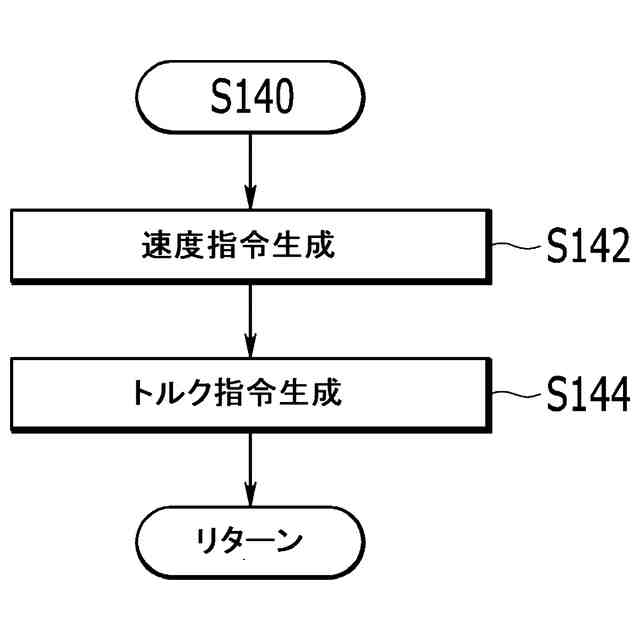
前記制御器は、各車輪の実際走行経路のための速度指令を生成し各車輪の実際走行経路のためのトルク指令を生成することによって各車輪の実際走行経路のための走行指令を生成するように構成されたことを特徴とする請求項1に記載のモビリティ用走行制御システム。
【請求項8】
前記制御器は、各車輪の実際走行経路とモビリティの目標速度指令に基づいて各車輪の実際走行経路のための速度指令を生成するように構成されたことを特徴とする請求項7に記載のモビリティ用走行制御システム。
【請求項9】
前記制御器は、各車輪の実際走行経路とモビリティの目標トルク指令に基づいて各車輪の実際走行経路のためのトルク指令を生成するように構成されたことを特徴とする請求項7に記載のモビリティ用走行制御システム。
【請求項10】
前記制御器は、各車輪の実際走行経路のための走行指令が適しているか判断し、各車輪の実際走行経路のための走行指令が適しているという判断に応答して前記走行指令に従って駆動部を制御するようにさらに構成されたことを特徴とする請求項1に記載のモビリティ用走行制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
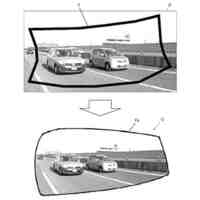
本発明はモビリティ用走行制御システムおよび方法に関し、より詳しくは、路面の表面情報をカメラで獲得して表面情報による実際走行経路を獲得して実際走行経路によって速度制御およびトルク制御を行うモビリティ用走行制御システムおよび方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
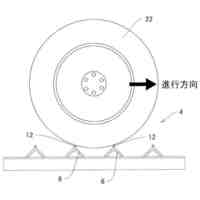
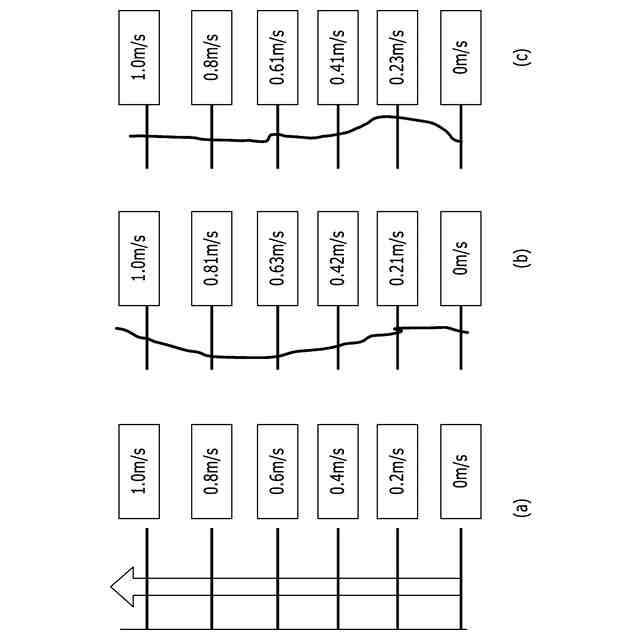
モビリティが曲面を走行する場合、上から見下ろしたビュー上で直進移動するために必要な左側車輪と右側車輪の走行距離が異なる。したがって、屈曲した平面を走行する時、屈曲を考慮しなければモビリティが所望の経路で移動できなくなる。甚だしくは車輪が凹んだところにはまって全く動けない場合も発生する。
【0003】
従来の技術によれば、このような問題を解決するためにモビリティにダイナミックサスペンションを装着した。しかし、ダイナミックサスペンションを装着するためにはモビリティのハードウェアを変更しなければならない。また、人や揺れてはならない物品を輸送しないモビリティに高性能サスペンションを装着することは要求性能に比べて製造単価を過度に高めることになる。したがって、ハードウェアを修正せずモータ制御ロジックのみを行って屈曲した路面に対応できるシステムおよび方法が必要である。この背景技術部分に記載された事項は発明の背景に対する理解を増進させるために作成されたもので、この技術の属する分野における通常の知識を有する者に既に知られた従来の技術でない事項を含む。
【先行技術文献】
【特許文献】
【0004】
特開2017-144934号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明の目的は、路面の表面情報をカメラで獲得し表面情報による実際走行経路を獲得して実際走行経路によってモータの速度制御およびトルク制御を行うモビリティ用走行制御システムおよび方法を提供することにある。
【課題を解決するための手段】
【0006】
本発明の実施形態によるモビリティ用走行制御システムは、モビリティの前方のライダーポイントデータを検出し、モビリティの前方の表面イメージをスキャンするように構成された前方地形スキャン部と、モビリティを移動させる動力を提供する駆動部と、各車輪の動半径を含むモビリティの仕様が保存されており、ライダーポイントデータを用いてモビリティの走行経路を生成し、モビリティの前方の表面イメージに基づいて表面の深さデータを検出し、各車輪の走行経路内表面の深さデータとモビリティの各車輪の動半径を用いて各車輪の実際走行経路を獲得し、各車輪の実際走行経路のための走行指令を生成し、前記生成された走行指令に従って駆動部の作動を制御するように構成された制御器と、を含むことを特徴とする。
【0007】
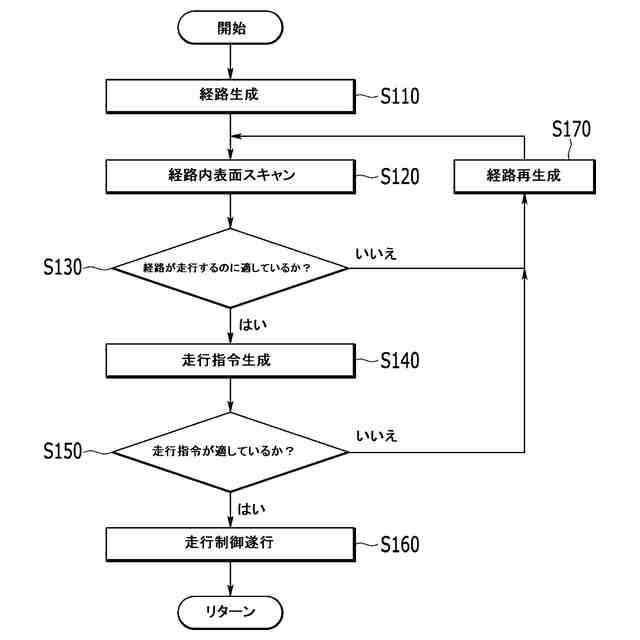
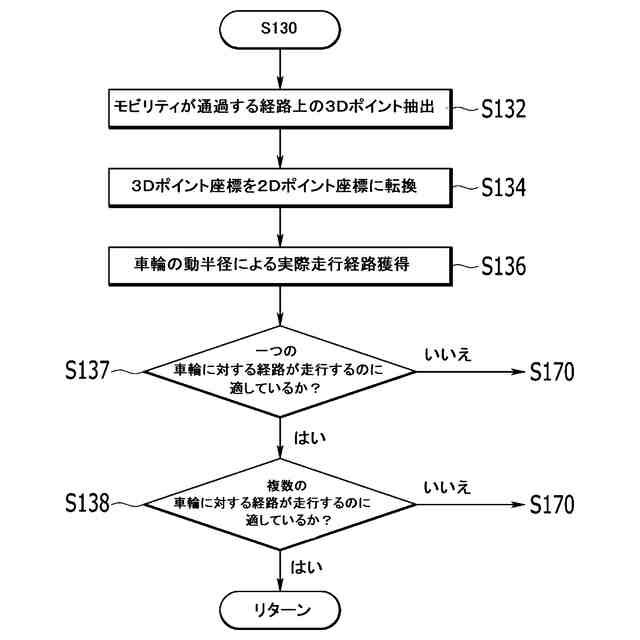
前記制御器は、一つの車輪の走行経路が走行するのに適しているかを判断し、複数の車輪に対する走行経路が走行するのに適しているかを判断するようにさらに構成されてもよい。
【0008】
前記制御器は、一つの車輪の走行経路が走行するのに適し複数の車輪に対する走行経路が走行するのに適していると判断することに反応して各車輪の実際走行経路のための走行指令を生成するようにさらに構成されてもよい。
【0009】
前記一つの車輪の走行経路が走行するのに適していないと判断するかまたは複数の車輪に対する走行経路が走行するのに適していないと判断することに反応して走行経路を再生成するようにさらに構成されてもよい。
【0010】
前記制御器は、一つの車輪の実際走行経路が予め設定された角度以上に折れると予想されることに反応して一つの車輪の走行経路が走行するのに適していないと判断するように構成できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
現代自動車株式会社
自動バレーパーキングを支援するシステム及びその方法
22日前
現代自動車株式会社
ユーザカスタマイズドリフト制御方法及びユーザカスタマイズドリフト制御装置
今日
個人
カーテント
1か月前
個人
飛行自動車
5か月前
個人
タイヤレバー
2日前
個人
警告装置
3か月前
個人
車窓用防虫網戸
2か月前
個人
小型EVシステム
3か月前
個人
車輪清掃装置
2か月前
個人
ホイルのボルト締結
1か月前
日本精機株式会社
ケース
3か月前
日本精機株式会社
表示装置
今日
日本精機株式会社
表示装置
今日
日本精機株式会社
表示装置
今日
個人
キャンピングトライク
1か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
照明装置
4か月前
日本精機株式会社
表示装置
4か月前
個人
車両通過構造物
3日前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
4か月前
井関農機株式会社
作業車両
1か月前
個人
アンチロール制御装置
4か月前
個人
車両用スリップ防止装置
1か月前
個人
キャンピングトレーラー
1か月前
個人
ワイパーゴム性能保持具
2か月前
個人
アクセルのソフトウェア
1か月前
個人
乗合路線バスの客室装置
15日前
株式会社松華
懸架装置
4か月前
個人
ブレーキシステム
4か月前
井関農機株式会社
収穫作業車両
2か月前
個人
車載小物入れ兼雨傘収納具
29日前
株式会社ニフコ
保持装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ