TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025096067
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023212554
出願日
2023-12-15
発明の名称
モータ駆動制御装置およびファンユニット
出願人
ミネベアミツミ株式会社
代理人
アインゼル・フェリックス=ラインハルト
,
個人
,
個人
主分類
H02P
6/08 20160101AFI20250619BHJP(電力の発電,変換,配電)
要約
【課題】風量センサを設けることなく、ファンの風量を一定に制御する。
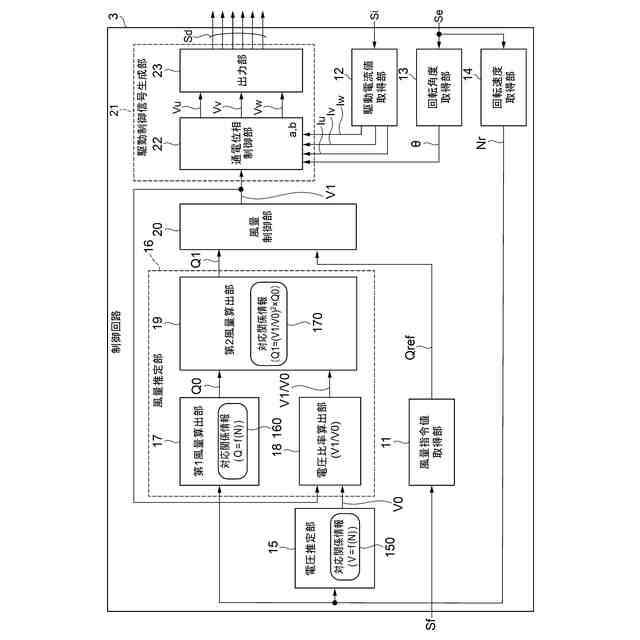
【解決手段】モータ駆動制御装置1において、制御回路3は、ファン6の静圧が基準値であるときの回転速度と電圧指令値との関係を表す第1対応関係情報150に基づいて、電圧推定値V0を算出する。制御回路3は、ファン6の静圧が基準値であるときの回転速度と風量との関係を表す第2対応関係情報160に基づいて、ファン6の静圧が基準値であるときの実回転速度Nrに対応する風量推定値Q0を算出するとともに、電圧推定値V0と電圧指令値V1との比を算出する。制御回路3は、風量推定値Q0と上記比とに基づいて風量推定値Q1を算出し、風量推定値Q1が風量指令値Qrefに一致するように電圧指令値V1を生成し、駆動制御信号Sdを生成する。
【選択図】図2
特許請求の範囲
【請求項1】
ファンのモータの駆動を制御するための駆動制御信号を出力する制御回路と、
前記制御回路から出力された前記駆動制御信号に基づいて前記モータを駆動するモータ駆動回路とを備え、
前記制御回路は、
前記ファンの風量が一定になるように、前記モータの駆動電圧の指令値である電圧指令値を算出する風量制御部と、
前記電圧指令値に基づいて前記駆動制御信号を生成する駆動制御信号生成部と、
前記モータのロータの回転速度である実回転速度を取得する回転速度取得部と、
前記ファンの静圧が基準値であるときの前記回転速度と前記電圧指令値との関係を表す第1対応関係情報に基づいて、前記ファンの静圧が前記基準値であるときの前記実回転速度に対応する前記電圧指令値である電圧推定値を算出する電圧推定部と、
前記ファンの静圧が前記基準値であるときの前記回転速度と前記風量との関係を表す第2対応関係情報に基づいて、前記ファンの静圧が前記基準値であるときの前記実回転速度に対応する風量である第1風量推定値を算出するとともに、前記風量制御部によって算出された前記電圧指令値と前記電圧推定値との比を算出し、前記第1風量推定値と前記比とに基づいて、前記風量制御部によって算出された前記電圧指令値に対応する風量である第2風量推定値を算出する風量推定部と、を有し、
前記風量制御部は、前記第2風量推定値が風量の目標値である風量指令値に一致するように前記電圧指令値を算出する
モータ駆動制御装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載のモータ駆動制御装置において、
前記基準値は、ゼロである
モータ駆動制御装置。
【請求項3】
請求項2に記載のモータ駆動制御装置において、
前記風量推定部は、
前記第2対応関係情報を有し、前記第2対応関係情報と前記実回転速度とに基づいて前記第1風量推定値を算出する第1風量算出部と、
前記電圧推定値に対する前記風量制御部によって算出された前記電圧指令値の比率を算出する電圧比率算出部と、
前記比率を2乗した値と前記第1風量推定値とを乗算して、前記第2風量推定値を算出する第2風量算出部と、を含む
モータ駆動制御装置。
【請求項4】
請求項1乃至3の何れか一項に記載のモータ駆動制御装置と、
前記モータ駆動制御装置によって駆動される前記モータと、
前記モータの回転力によって回転可能に構成されたインペラと、を備える
ファンユニット。
【請求項5】
ファンの風量が一定になるように、前記ファンのモータの駆動電圧の指令値である電圧指令値を算出する第1ステップと、
前記電圧指令値に基づいて、前記モータの駆動を制御するための駆動制御信号を生成する第2ステップと、
前記モータのロータの回転速度である実回転速度を取得する第3ステップと、
前記ファンの静圧が基準値であるときの前記回転速度と前記電圧指令値との関係を表す第1対応関係情報に基づいて、前記ファンの静圧が前記基準値であるときの、前記実回転速度に対応する前記電圧指令値である電圧推定値を算出する第4ステップと、
前記ファンの静圧が前記基準値であるときの前記回転速度と前記風量との関係を表す第2対応関係情報に基づいて、前記ファンの静圧が前記基準値であるときの、前記実回転速度に対応する風量である第1風量推定値を算出する第5ステップと、
前記第1ステップにおいて算出された前記電圧指令値と前記第4ステップにおいて算出された前記電圧推定値との比を算出する第6ステップと、
前記第5ステップにおいて算出した前記第1風量推定値と前記第6ステップにおいて算出した比とに基づいて、前記第1ステップにおいて算出された前記電圧指令値に対応する風量である第2風量推定値を算出する第7ステップと、を含み、
前記第1ステップは、前記第7ステップにおいて算出した前記第2風量推定値が風量の目標値である風量指令値に一致するように前記電圧指令値を算出するステップを含む
モータ駆動制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ駆動制御装置およびファンユニットに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
換気扇等において、ダクト長やダクトの内部および外部の状態に起因する圧力損失(静圧)の変化等によって送風量(風量)が変化することが知られている。そのため、換気扇等のファンのモータを駆動するモータ駆動制御装置には、静圧等が変化した場合であってもファンの送風が一定となるようにモータを制御する機能が求められている。
【0003】
ファンの風量を一定に制御するための従来技術として、ファン(モータ)のトルクの指令値を算出することにより、トルクと風量との関係に基づいてファンの風量を一定に保つ手法が知られている(下記特許文献1,2参照)。
【先行技術文献】
【特許文献】
【0004】
特開2022-10912号公報
特許第6037316号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、軸流ファンのように風量と静圧との関係を表す特性(P-Q特性)に、空気の流れが不安定になる領域(旋回失速領域)が存在する場合には、旋回失速により風量とトルクとの関係が一様でなくなるため、上記特許文献に代表される技術では、風量を一定に制御することが困難である。
【0006】
一方で、風量センサによってファンの風量を測定し、測定した風量が目標とする風量に一致するように風量一定制御を行うことも可能である。しかしながら、この手法では、風量センサを新たに設ける必要があり、風量センサの取り付け位置の確保や風量センサの取り付けによる施工の煩雑化などにより、製造コストの増大を招く。
【0007】
本発明は、上述した課題を解消するためのものであり、風量センサを設けることなく、ファンの風量を一定に制御することを目的とする。
【課題を解決するための手段】
【0008】
本発明の代表的な実施の形態に係るモータ駆動制御装置は、ファンのモータの駆動を制御するための駆動制御信号を出力する制御回路と、前記制御回路から出力された前記駆動制御信号に基づいて前記モータを駆動するモータ駆動回路とを備え、前記制御回路は、前記ファンの風量が一定になるように、前記モータの駆動電圧の指令値である電圧指令値を算出する風量制御部と、前記電圧指令値に基づいて前記駆動制御信号を生成する駆動制御信号生成部と、前記モータのロータの回転速度である実回転速度を取得する回転速度取得部と、前記ファンの静圧が基準値であるときの前記回転速度と前記電圧指令値との関係を表す第1対応関係情報に基づいて、前記ファンの静圧が前記基準値であるときの前記実回転速度に対応する前記電圧指令値である電圧推定値を算出する電圧推定部と、前記ファンの静圧が前記基準値であるときの前記回転速度と前記風量との関係を表す第2対応関係情報に基づいて、前記ファンの静圧が前記基準値であるときの前記実回転速度に対応する風量である第1風量推定値を算出するとともに、前記風量制御部によって算出された前記電圧指令値と前記電圧推定値との比を算出し、前記第1風量推定値と前記比とに基づいて、前記風量制御部によって算出された前記電圧指令値に対応する風量である第2風量推定値を算出する風量推定部と、を有し、前記風量制御部は、前記第2風量推定値が風量の目標値である風量指令値に一致するように前記電圧指令値を算出することを特徴とする。
【発明の効果】
【0009】
本発明の一態様によれば、風量センサを設けることなく、ファンの風量を一定に制御することが可能となる。
【図面の簡単な説明】
【0010】
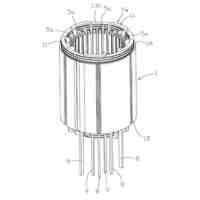
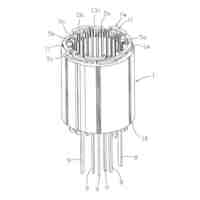
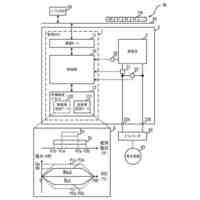
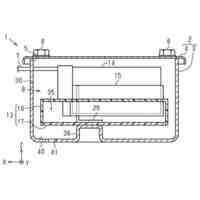
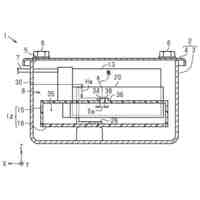
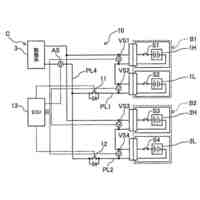
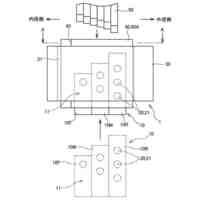
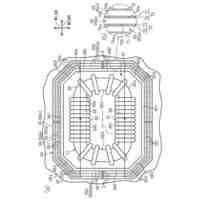
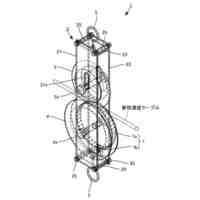
実施の形態に係るモータ駆動制御装置を備えたファンユニットの構成を示す図である。
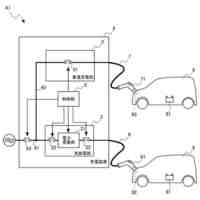
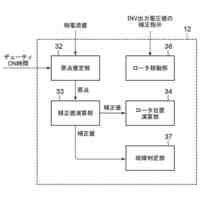
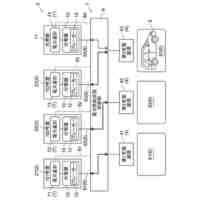
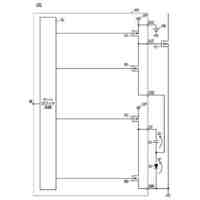
実施の形態に係る制御回路の機能ブロック構成を示す図である。
ファンにおける電圧指令値と回転速度との関係を示す図である。
ファンにおけるモータの回転速度と風量との関係を示す図である。
電圧指令値が一定である場合における、回転速度と電流との関係を示す図である。
電圧指令値が一定である場合における、回転速度と電流と電圧指令値との関係を模式的に示す図である。
モータの回転速度が一定である場合における、電圧指令値と電流との関係を示す図である。
モータの回転速度が一定である場合における、回転速度と電流と電圧指令値との関係を模式的に示す図である。
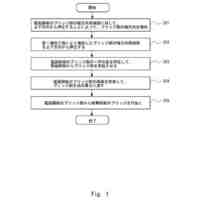
実施の形態に係るモータ駆動制御装置による風量一定制御の処理の流れを示すフローチャートである。
実施の形態に係るモータ駆動制御装置によってファンを駆動したときのシミュレーション結果を示す図である。
実施の形態に係るモータ駆動制御装置によってファンを駆動したときの実測結果を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
恒久電源開発の装置
5日前
個人
太陽光発電システム
14日前
北勢工業株式会社
保護管
12日前
ダイハツ工業株式会社
溶接装置
5日前
トヨタ自動車株式会社
予測方法
1か月前
トヨタ自動車株式会社
充電装置
7日前
愛知電機株式会社
ステータおよびモータ
5日前
株式会社ダイヘン
充電装置
12日前
愛知電機株式会社
ステータおよびモータ
5日前
株式会社セイワ
車両用配線カバー
25日前
サンデン株式会社
モータ制御装置
5日前
ダイハツ工業株式会社
ロータ構造
12日前
株式会社デンソー
電気装置
14日前
愛知電機株式会社
ステータおよびモータ
5日前
トヨタ自動車株式会社
電池制御装置
29日前
住友電装株式会社
電気接続箱
12日前
個人
バネとクラッチを用いた波浪発電装置
14日前
因幡電機産業株式会社
充電システム
5日前
住友電装株式会社
電気接続箱
12日前
キヤノン株式会社
画像形成装置
12日前
矢崎総業株式会社
電池切替装置
7日前
株式会社ダイヘン
電力システム
12日前
株式会社豊田自動織機
回転電機
21日前
富士電機株式会社
リニアモータ
25日前
ダイハツ工業株式会社
ステータ製造装置
15日前
株式会社IJTT
オイル冷却装置
5日前
ダイハツ工業株式会社
コイル組付け装置
22日前
株式会社豊田自動織機
電動圧縮機
21日前
スズキ株式会社
車両用モータ構造
5日前
三菱電機株式会社
束線器具
8日前
三菱電機株式会社
ゲート駆動装置
12日前
北海道電力株式会社
延線金車
20日前
株式会社明電舎
電動機
13日前
株式会社エフ・シー・シー
太陽光発電装置
25日前
ニチコン株式会社
電源回路
6日前
トヨタ自動車株式会社
積層鋼板の製造方法
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ