TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025094992
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023210734
出願日
2023-12-14
発明の名称
モータ制御装置
出願人
サンデン株式会社
代理人
個人
主分類
H02P
6/182 20160101AFI20250619BHJP(電力の発電,変換,配電)
要約
【課題】部品バラツキに左右されること無く、センサレス制御により正確なロータ位置検出を行うことができるようにしたモータ制御装置を提供する。
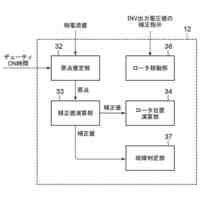
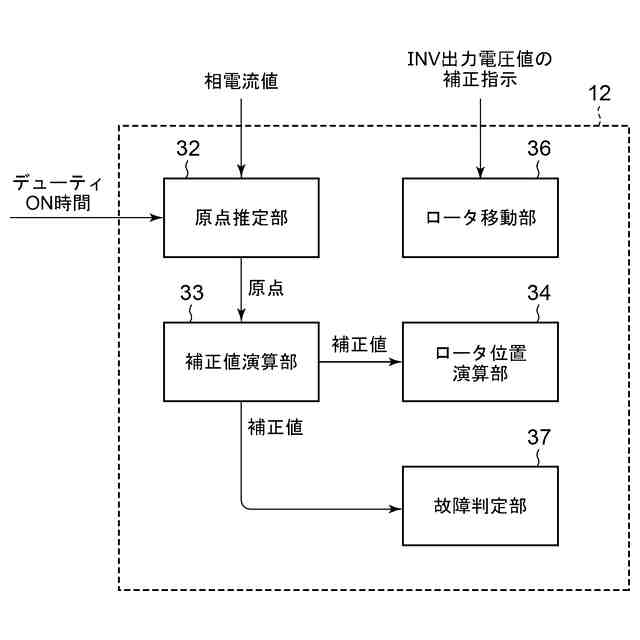
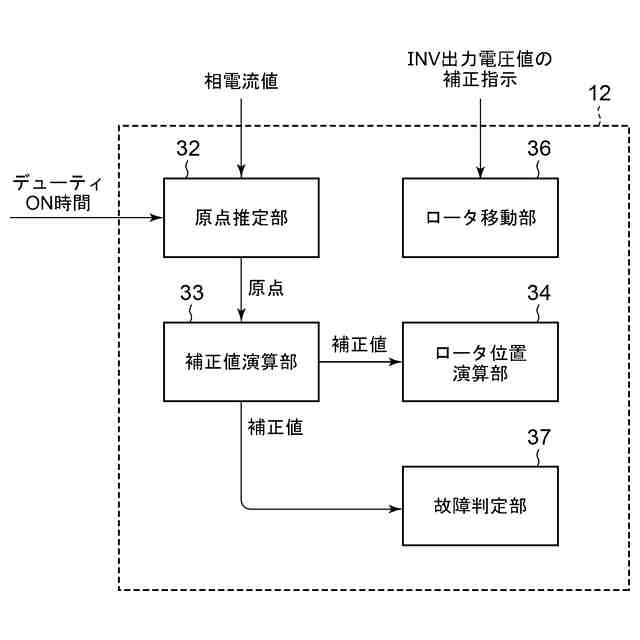
【解決手段】PWM信号生成部が算出したデューティON時間から求められるインバータ出力電圧値に基づいて算出された誘起電圧値と相電流値により、ロータ位置を検出するロータ位置検出部12と、デューティON時間に対する相電流値の関係から、相電流値が0となるデューティON時間を求めて原点を推定する原点推定部32と、推定された原点に基づいてインバータ出力電圧値を補正するための補正値を算出する補正値演算部33と、補正値により補正されたインバータ出力電圧値に基づいて算出された誘起電圧値と相電流値に基づいてロータ位置を算出するロータ位置演算部を備える。
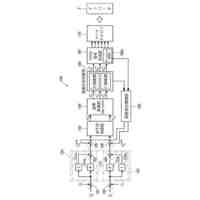
【選択図】図3
特許請求の範囲
【請求項1】
永久磁石同期モータのロータ位置をセンサレス制御により検出し、インバータにより前記モータを駆動するモータ制御装置において、
前記モータのコイルに流れる相電流値を検出する電流検出部と、
前記インバータを構成する複数のスイッチング素子のデューティON時間を算出し、算出されたデューティON時間からPWM信号を生成して前記インバータに出力するPWM信号生成部と、
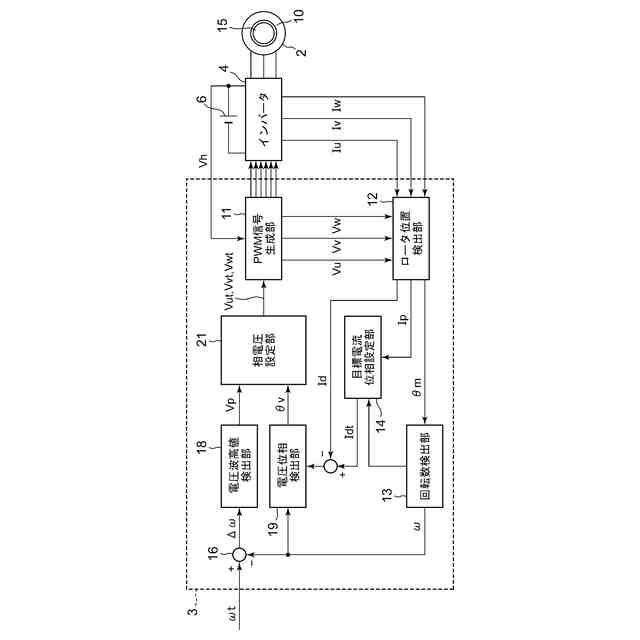
該PWM信号生成部が算出した前記デューティON時間から求められるインバータ出力電圧値に基づいて算出された誘起電圧値と、前記電流検出部が検出した前記相電流値により、前記ロータ位置を検出するロータ位置検出部と、
前記PWM信号生成部が算出した前記デューティON時間に対する前記電流検出部が検出した前記相電流値の関係から、当該相電流値が0となる前記デューティON時間を求めて原点を推定する原点推定部と、
該原点推定部が推定した前記原点に基づいて、前記インバータ出力電圧値を補正するための補正値を算出する補正値演算部を備え、
前記ロータ位置検出部は、
前記補正値演算部が算出した前記補正値により前記インバータ出力電圧値を補正し、当該補正されたインバータ出力電圧値に基づいて算出された前記誘起電圧値と、前記相電流値に基づいて前記ロータ位置を算出するロータ位置演算部を有することを特徴とするモータ制御装置。
続きを表示(約 1,200 文字)
【請求項2】
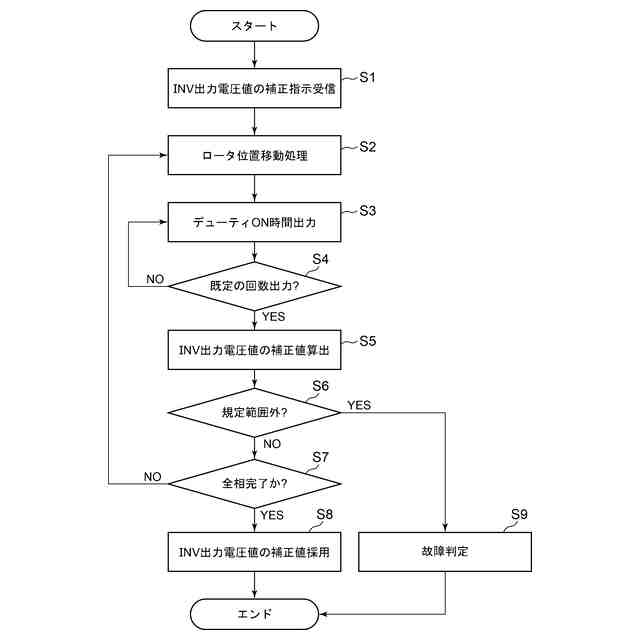
前記原点推定部は、前記各スイッチング素子に対してそれぞれ前記原点を推定し、
前記補正値演算部は、前記各スイッチング素子に対してそれぞれ前記補正値を算出すると共に、
前記ロータ位置演算部は、算出された前記各補正値を前記各スイッチング素子の前記インバータ出力電圧値の補正に対してそれぞれ採用することを特徴とする請求項1に記載のモータ制御装置。
【請求項3】
前記原点推定部は、前記各スイッチング素子に対してそれぞれ前記原点を推定し、
前記補正値演算部は、前記各スイッチング素子に対してそれぞれ前記補正値を算出すると共に、
前記ロータ位置演算部は、算出された前記各補正値を平均した値を前記各スイッチング素子の前記インバータ出力電圧値の補正に対して採用することを特徴とする請求項1に記載のモータ制御装置。
【請求項4】
前記原点推定部が前記原点を推定し、前記補正値演算部が前記補正値を算出する対象とする前記スイッチング素子の通電位相に前記ロータを移動させるロータ移動部を備えたことを特徴とする請求項2又は請求項3に記載のモータ制御装置。
【請求項5】
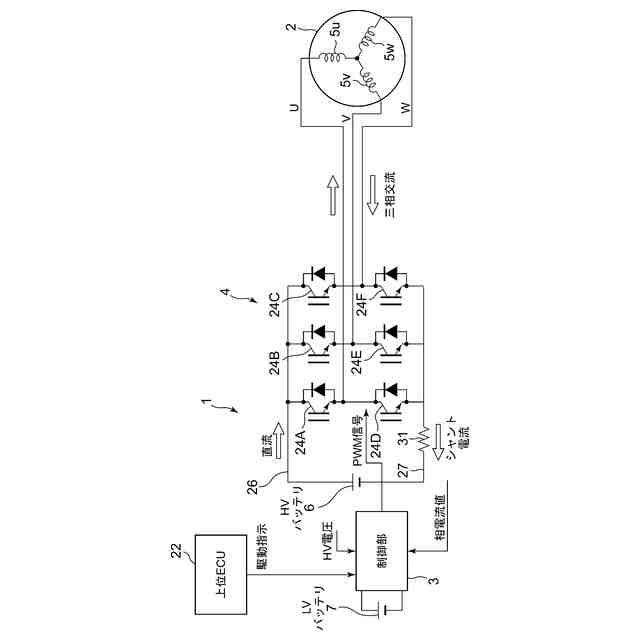
前記インバータは、三つの上アームスイッチング素子と、三つの下アームスイッチング素子から構成されており、
前記原点推定部は、
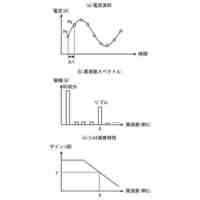
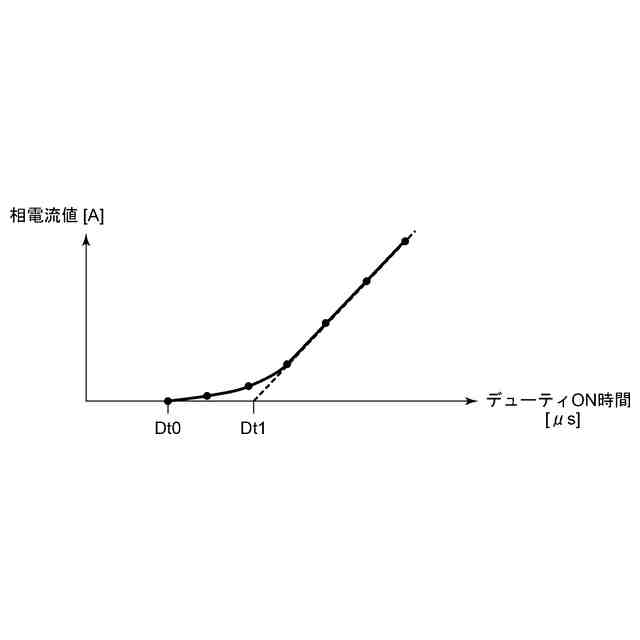
二つの前記下アームスイッチング素子をON状態に維持し、一つの前記上アームスイッチング素子のデューティON時間を大きくする方向で変更して行ったときに、変更した前記デューティON時間と前記相電流値との関係が一次関数に近似する領域から傾きを求め、当該傾きの直線上で前記相電流値が0となる前記デューティON時間を前記原点とすることを特徴とする請求項1に記載のモータ制御装置。
【請求項6】
前記インバータは、三つの上アームスイッチング素子と、三つの下アームスイッチング素子から構成されており、
前記原点推定部は、
二つの前記上アームスイッチング素子をON状態に維持し、一つの前記下アームスイッチング素子のデューティON時間を大きくする方向で変更して行ったときに、変更した前記デューティON時間と前記相電流値との関係が一次関数に近似する領域から傾きを求め、当該傾きの直線上で前記相電流値が0となる前記デューティON時間を前記原点とすることを特徴とする請求項1に記載のモータ制御装置。
【請求項7】
前記補正値演算部は、
前記デューティON時間を変更して行く際の、前記デューティON時間が0のときを開始点とし、当該開始点と前記原点との差から前記補正値を算出することを特徴とする請求項5又は請求項6に記載のモータ制御装置。
【請求項8】
前記補正値演算部が算出した前記補正値が所定の規定範囲外である場合、前記インバータの故障と判断する故障判定部を備えたことを特徴とする請求項1に記載のモータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、永久磁石同期モータのロータ位置をセンサレス制御により検出し、インバータを用いて駆動するモータ制御装置に関するものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
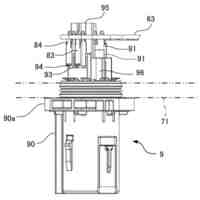
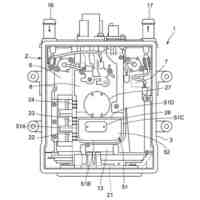
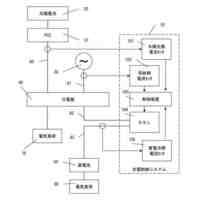
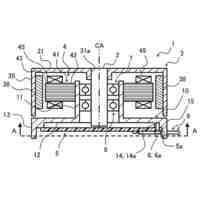
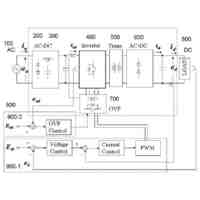
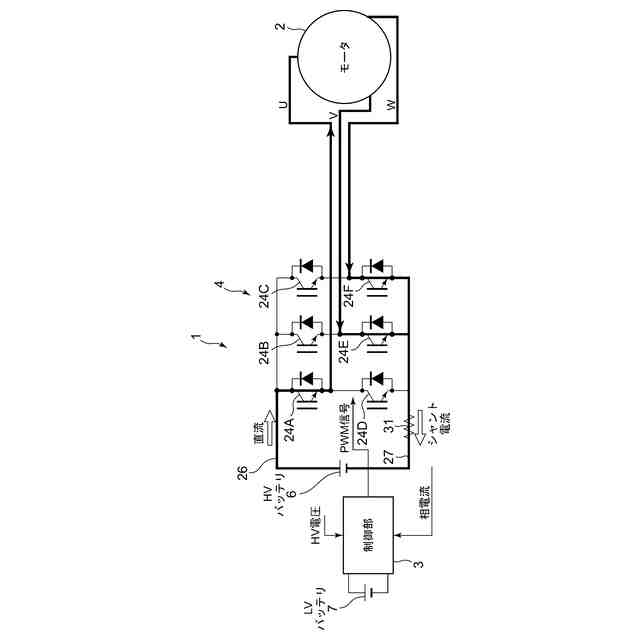
従来より永久磁石同期モータ、特にロータに永久磁石を埋め込んだ埋込型永久磁石同期モータは、電気自動車等の電動車両の空気調和装置(車両用空気調和装置)を構成する電動圧縮機のモータ等に広く採用されているが、この種のモータの駆動を制御するモータ制御装置は、モータ、インバータ、直流電源(HVバッテリ)、及び、マイクロコンピュータを内蔵した制御部(コントローラ)から構成される。
【0003】
また、上記モータ制御装置では、シャント抵抗にて検出される相電流値、インバータ出力電圧値(三相電圧値)、及び、コイル抵抗(巻線抵抗)から求められる誘起電圧値(逆起電圧の値)と、相電流値からロータ位置を検出し、物理的な位置検出センサを用いること無く、モータを制御するセンサレス制御が行われる(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特許第5838032号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記ロータ位置を算出するための誘起電圧値は、インバータ出力電圧値が正確に分からないと正確に算出することができない。一方で、インバータを構成するスイッチング素子のON/OFFによる印加電圧(実際のインバータ出力電圧)の立ち上がり、立ち下がりには遅延(なまり)が生じるため、デューティON時間とHV電圧との掛け算で求められる計算上のインバータ出力電圧値(三相電圧値)と、実際にモータに印加されるインバータ出力電圧値との間に誤差が生じる。そこで、従来では試作品により上記誤差を予め求め、計算上のインバータ出力電圧値を補正するようにしていた。
【0006】
しかしながら、計算上のインバータ出力電圧値と、実際にモータに印加されるインバータ出力電圧値との誤差は、スイッチング素子等の部品バラツキにより異なってくるため、誘起電圧値を算出するのに必要なインバータ出力電圧値が最適な値(実際にモータに印加されるインバータ出力電圧値)となるように、計算上のインバータ出力電圧値を補正することができなくなり、正確なロータ位置検出ができなくなるという問題があった。
【0007】
本発明は、係る従来の技術的課題を解決するために成されたものであり、部品バラツキに左右されること無く、センサレス制御により正確なロータ位置検出を行うことができるようにしたモータ制御装置を提供するものである。
【課題を解決するための手段】
【0008】
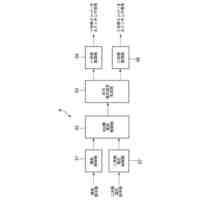
本発明のモータ制御装置は、永久磁石同期モータのロータ位置をセンサレス制御により検出し、インバータによりモータを駆動するものであって、モータのコイルに流れる相電流値を検出する電流検出部と、インバータを構成する複数のスイッチング素子のデューティON時間を算出し、算出されたデューティON時間からPWM信号を生成してインバータに出力するPWM信号生成部と、このPWM信号生成部が算出したデューティON時間から求められるインバータ出力電圧値に基づいて算出された誘起電圧値と、電流検出部が検出した相電流値により、ロータ位置を検出するロータ位置検出部と、PWM信号生成部が算出したデューティON時間に対する電流検出部が検出した相電流値の関係から、当該相電流値が0となるデューティON時間を求めて原点を推定する原点推定部と、この原点推定部が推定した原点に基づいて、インバータ出力電圧値を補正するための補正値を算出する補正値演算部を備え、ロータ位置検出部は、補正値演算部が算出した補正値によりインバータ出力電圧値を補正し、当該補正されたインバータ出力電圧値に基づいて算出された誘起電圧値と、相電流値に基づいてロータ位置を算出するロータ位置演算部を有することを特徴とする。
【0009】
請求項2の発明のモータ制御装置は、上記発明において原点推定部は、各スイッチング素子に対してそれぞれ原点を推定し、補正値演算部は、各スイッチング素子に対してそれぞれ補正値を算出すると共に、ロータ位置演算部は、算出された各補正値を各スイッチング素子のインバータ出力電圧値の補正に対してそれぞれ採用することを特徴とする。
【0010】
請求項3の発明のモータ制御装置は、請求項1の発明において原点推定部は、各スイッチング素子に対してそれぞれ原点を推定し、補正値演算部は、各スイッチング素子に対してそれぞれ補正値を算出すると共に、ロータ位置演算部は、算出された各補正値を平均した値を各スイッチング素子のインバータ出力電圧値の補正に対して採用することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
サンデン株式会社
電動圧縮機
1か月前
サンデン株式会社
電動圧縮機
1か月前
サンデン株式会社
電動圧縮機
1か月前
サンデン株式会社
電動圧縮機
1か月前
サンデン株式会社
電力変換装置
1か月前
サンデン株式会社
電力変換装置
15日前
サンデン株式会社
電力変換装置
15日前
サンデン株式会社
車両用空調装置
1か月前
サンデン株式会社
車両用空調装置
1か月前
サンデン株式会社
車両用空調装置
1か月前
サンデン株式会社
車両用空調装置
1か月前
サンデン株式会社
車両用空調装置
1か月前
サンデン株式会社
モータ制御装置
1か月前
サンデン株式会社
車両用空調装置
1か月前
サンデン株式会社
横置型ロータリー圧縮機
1か月前
サンデン株式会社
横置型ロータリー圧縮機
1か月前
サンデン株式会社
車両用バッテリ温調システム
1か月前
サンデン株式会社
車両用バッテリ温調システム
1か月前
サンデン株式会社
インバータ一体型電動圧縮機及びその製造方法
1か月前
サンデン株式会社
電子部品の耐振構造及びそれを備えた熱媒体加熱装置
1か月前
個人
充電制御システム
今日
ニデック株式会社
モータ
14日前
個人
発電装置
8日前
個人
電流制御形AC-DC電源
7日前
株式会社ナユタ
電源装置
今日
キヤノン株式会社
電源装置
8日前
キヤノン株式会社
電源装置
1か月前
個人
ステッピングモータ実習装置
21日前
株式会社竹中工務店
避雷設備
1か月前
スズキ株式会社
移動システム
今日
カヤバ株式会社
モータ制御装置
3日前
トヨタ自動車株式会社
駆動装置
10日前
カヤバ株式会社
モータ制御装置
3日前
サンデン株式会社
電力変換装置
15日前
トヨタ自動車株式会社
充電方法
28日前
サンデン株式会社
電力変換装置
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ