TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025094616
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2023210294
出願日
2023-12-13
発明の名称
移動体制御装置、移動体制御方法、及びプログラム
出願人
本田技研工業株式会社
代理人
弁理士法人大島特許事務所
主分類
B60W
30/16 20200101AFI20250618BHJP(車両一般)
要約
【課題】 ブレーキ装置のフェード現象を抑制しつつ、先行移動体に対する追従性を維持することができる移動体制御装置を提供する。
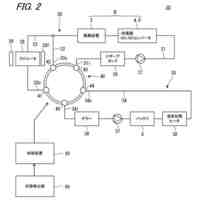
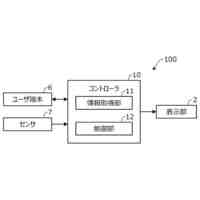
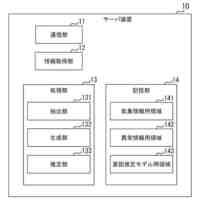
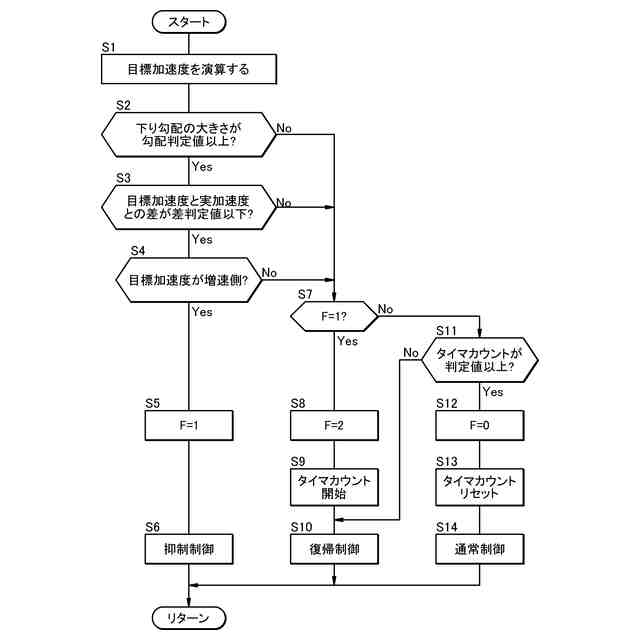
【解決手段】 移動体制御装置15は、加速度取得部42と、勾配取得部43と、先行移動体検出部44と、追従制御部45とを有する。追従制御部は、移動体と先行移動体との距離と、目標距離とに基づいて目標加速度を演算し、走行路の下り勾配の大きさが所定の勾配判定値以上、かつ目標加速度と実加速度との差が所定の差判定値以下の条件が成立したときに、目標加速度の絶対値を減少させた補正目標加速度を演算する抑制制御を開始する。追従制御部が抑制制御を実行している間、目標加速度に代えて補正目標加速度に基づいて推進装置及びブレーキ装置が制御される。
【選択図】 図2
特許請求の範囲
【請求項1】
移動体の走行制御を行う移動体制御装置であって、
前記移動体の実加速度を取得する加速度取得部と、
前記移動体が走行する走行路の勾配を取得する勾配取得部と、
前記移動体に先行して移動する先行移動体を検出する先行移動体検出部と、
前記移動体を前記先行移動体に追従させるべく、推進装置及びブレーキ装置を制御するための目標加速度を演算する追従制御を実行する追従制御部とを有し、
前記追従制御部は、前記移動体と前記先行移動体との距離と、目標距離とに基づいて前記目標加速度を演算し、
前記走行路の下り勾配の大きさが所定の勾配判定値以上、かつ前記目標加速度と前記実加速度との差が所定の差判定値以下の条件が成立したときに、前記目標加速度の絶対値を減少させた補正目標加速度を演算する抑制制御を開始し、
前記追従制御部が前記抑制制御を実行している間、前記目標加速度に代えて前記補正目標加速度に基づいて前記推進装置及び前記ブレーキ装置が制御される移動体制御装置。
続きを表示(約 870 文字)
【請求項2】
前記追従制御部は、前記走行路の下り勾配の大きさが所定の勾配判定値以上、かつ前記目標加速度と前記実加速度との差が所定の前記差判定値以下、かつ前記目標加速度が増速側の値である条件が成立したときに、前記抑制制御を開始する請求項1に記載の移動体制御装置。
【請求項3】
前記追従制御部は、前記ブレーキ装置の温度が所定の温度判定値以上であるときに、前記追従制御を停止する請求項1に記載の移動体制御装置。
【請求項4】
前記追従制御部は、前記移動体と前記先行移動体との距離が前記目標距離に近づくように、前記目標加速度を演算する請求項1に記載の移動体制御装置。
【請求項5】
前記追従制御部は、前記目標加速度と前記実加速度との差が前記差判定値より大きくなったときに、前記抑制制御を停止する請求項1に記載の移動体制御装置。
【請求項6】
前記追従制御部は、前記移動体の乗員の運転操作を受け付ける運転操作装置への入力操作が検出されたときに、前記抑制制御を停止する請求項1に記載の移動体制御装置。
【請求項7】
前記追従制御部は、前記先行移動体が追従対象ではなくなったときに、前記追従制御を停止する請求項1に記載の移動体制御装置。
【請求項8】
前記追従制御部は、前記抑制制御が停止された後に、前記目標加速度の絶対値の変化量を抑制する復帰処理を実行する請求項5~7のいずれか1つの項に記載の移動体制御装置。
【請求項9】
前記追従制御部は、前記復帰処理において、前記目標加速度と前記実加速度との差に基づいて前記目標加速度の絶対値の前記変化量を抑制する請求項8に記載の移動体制御装置。
【請求項10】
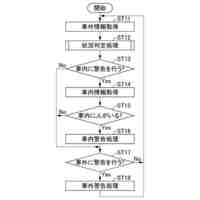
前記追従制御部が前記抑制制御を実行しているときに、前記移動体の乗員に前記抑制制御が実行されていることを報知する報知部を有する請求項1~7のいずれか1つの項に記載の移動体制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体制御装置、移動体制御方法、及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムを提供する取り組みが活発化している。この実現に向けて、交通の安全性や利便性をより一層改善するために、運転支援技術や自動運転技術に関する研究開発が行われている。
【0003】
特許文献1は、先行車両に対して追従走行を実行する車両制御装置を開示している。この車両制御装置は、ブレーキパッドの温度に基づいて、制御に使用するマップを通常マップとフェード抑制用マップとで切り替える。フェード抑制用マップが選択された場合、通常マップが選択された場合に比べて、加減速制御の応答性が緩やかになる。これにより、ブレーキの使用が抑制され、ブレーキがフェード状態になることが抑制される。
【先行技術文献】
【特許文献】
【0004】
特許第4161822号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、フェード抑制用マップに基づく制御が継続すると、先行車両に対する追従性が悪化し、更には先行車両に対して追従できなくなる虞がある。
【0006】
本発明は、以上の背景を鑑み、ブレーキ装置のフェード現象を抑制しつつ、先行移動体に対する追従性を維持することができる移動体制御装置、移動体制御方法、及びプログラムを提供することを課題とする。これにより、本発明は、持続可能な輸送システムの発展に貢献することを目的とする。
【課題を解決するための手段】
【0007】
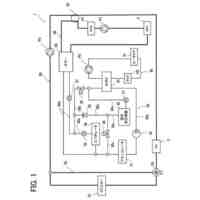
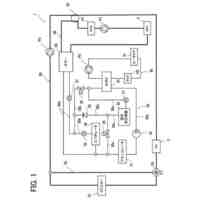
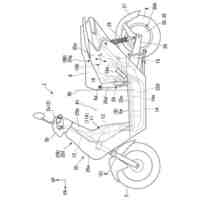
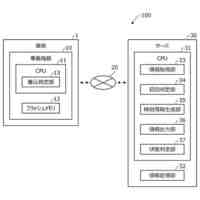
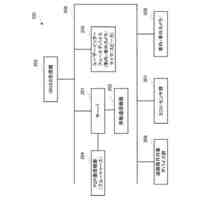
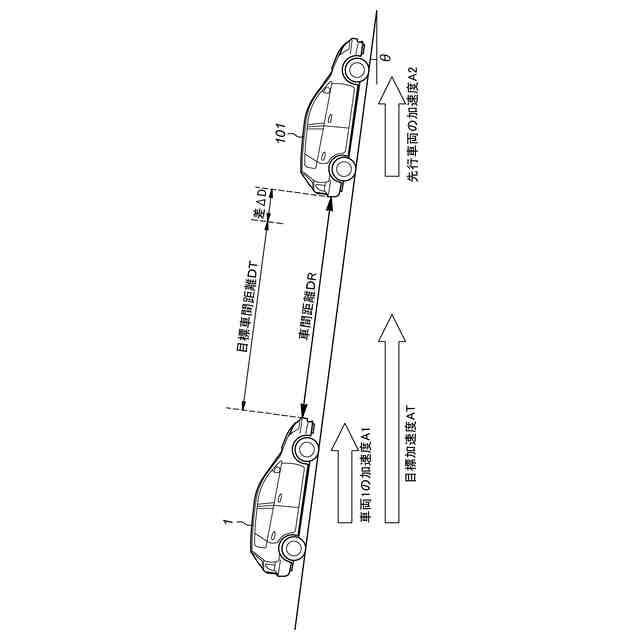
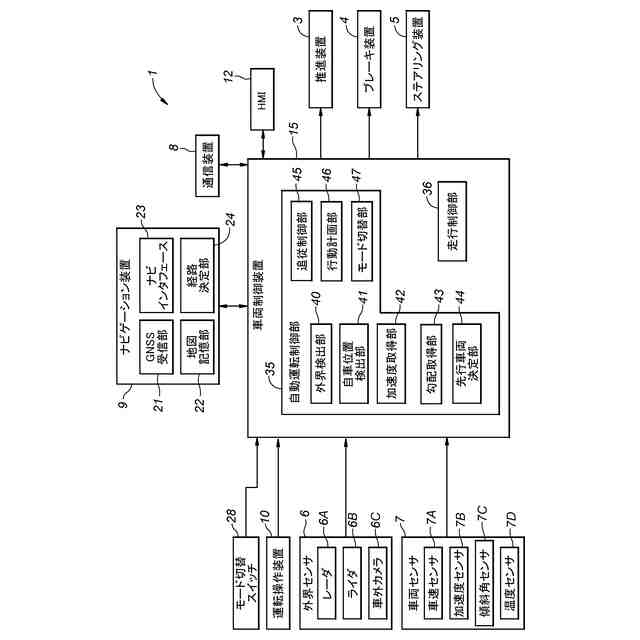
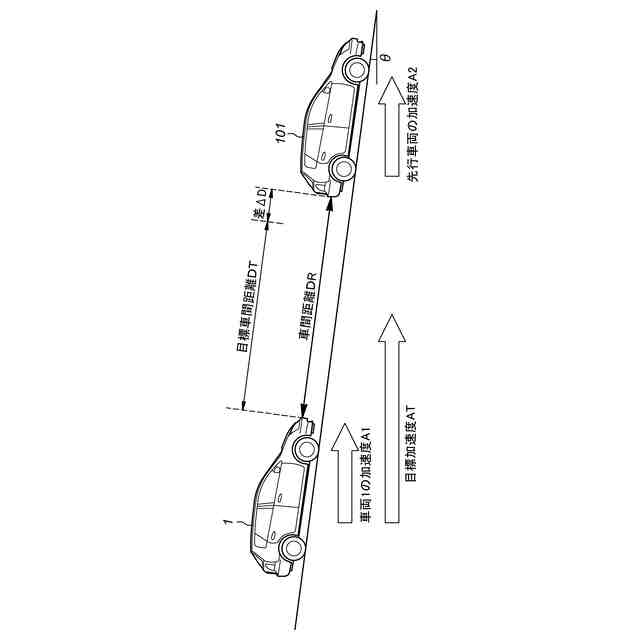
上記課題を解決するために本発明のある態様は、移動体(1)の走行制御を行う移動体制御装置(15)であって、前記移動体の実加速度を取得する加速度取得部(42)と、前記移動体が走行する走行路の勾配を取得する勾配取得部(43)と、前記移動体に先行して移動する先行移動体を検出する先行移動体検出部(44)と、前記移動体を前記先行移動体に追従させるべく、推進装置及びブレーキ装置を制御するための目標加速度を演算する追従制御を実行する追従制御部(45)とを有し、前記追従制御部は、前記移動体と前記先行移動体との距離と、目標距離とに基づいて前記目標加速度を演算し、前記走行路の下り勾配の大きさが所定の勾配判定値以上、かつ前記目標加速度と前記実加速度との差が所定の差判定値以下の条件が成立したときに、前記目標加速度の絶対値を減少させた補正目標加速度を演算する抑制制御を開始し、前記追従制御部が前記抑制制御を実行している間、前記目標加速度に代えて前記補正目標加速度に基づいて前記推進装置及び前記ブレーキ装置が制御される。
【0008】
この態様によれば、ブレーキ装置のフェード現象を抑制しつつ、先行移動体に対する追従性を維持することができる移動体制御装置を提供することができる。抑制制御が実行されることによって、加速の増加が緩やかになり、移動体と先行移動体との距離が近くなることが抑制される。これにより、ブレーキ装置の使用が抑制され、ブレーキ装置の温度上昇及びフェード現象が抑制される。抑制制御が実行されるときには、目標加速度と実加速度との差が差判定値以下であるため、目標加速度の絶対値が抑制されても、移動体と先行移動体との距離が大きく変化することが抑制される。
【0009】
上記の態様において、前記追従制御部は、前記走行路の下り勾配の大きさが所定の勾配判定値以上、かつ前記目標加速度と前記実加速度との差が所定の前記差判定値以下、かつ前記目標加速度が増速側の値である条件が成立したときに、前記抑制制御を開始してもよい。
【0010】
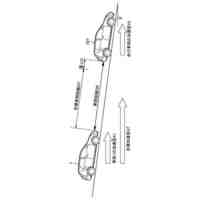
この態様によれば、ブレーキ装置のフェード現象を抑制しつつ、先行車両に対する追従性を維持することができる移動体制御装置を提供することができる。走行路が下り勾配であるとき、移動体には重力によって増速側への加速度が生じる。そのため、増速側の目標加速度が抑制されても、先行移動体に対する追従性は維持される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両
10日前
本田技研工業株式会社
車両
10日前
本田技研工業株式会社
クリップ
18日前
本田技研工業株式会社
鞍乗り型車両
9日前
本田技研工業株式会社
温調システム
2日前
本田技研工業株式会社
鞍乗り型車両
11日前
本田技研工業株式会社
着用物着脱装置
2日前
本田技研工業株式会社
コイル成形部材
18日前
本田技研工業株式会社
コイルユニット
18日前
本田技研工業株式会社
車両電源システム
11日前
本田技研工業株式会社
鞍乗り型電動車両
10日前
本田技研工業株式会社
電池劣化推定装置
22日前
本田技研工業株式会社
車両用映像表示装置
2日前
本田技研工業株式会社
加熱安全性評価装置
10日前
本田技研工業株式会社
車両用フレーム構造
17日前
本田技研工業株式会社
車両用フレーム構造
17日前
本田技研工業株式会社
車両用映像表示装置
2日前
本田技研工業株式会社
車両用映像表示装置
2日前
本田技研工業株式会社
車両用映像表示装置
2日前
本田技研工業株式会社
車両用映像表示装置
2日前
本田技研工業株式会社
制御装置及びプログラム
11日前
本田技研工業株式会社
電極構造観察用セル組立体
9日前
本田技研工業株式会社
投影管理装置及びプログラム
17日前
本田技研工業株式会社
要因推定システムおよび車両
12日前
本田技研工業株式会社
導体成形装置及び導体成形方法
12日前
本田技研工業株式会社
制御装置、プログラム及び車両
17日前
本田技研工業株式会社
四輪駆動車両の駆動力制御装置
2日前
本田技研工業株式会社
運転評価装置および運転評価方法
10日前
本田技研工業株式会社
運転評価装置および運転評価方法
10日前
本田技研工業株式会社
制御装置、プログラム及び制御方法
12日前
本田技研工業株式会社
前照灯制御装置及び前照灯制御方法
12日前
本田技研工業株式会社
車両情報収集装置および車両情報収集システム
11日前
本田技研工業株式会社
車載通信システムおよび車両情報提供システム
2日前
本田技研工業株式会社
情報処理装置、情報処理方法、およびプログラム
4日前
本田技研工業株式会社
移動体制御装置、移動体制御方法、及びプログラム
3日前
本田技研工業株式会社
移動体制御装置、移動体制御方法、及びプログラム
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ