TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025093077
公報種別
公開特許公報(A)
公開日
2025-06-23
出願番号
2023208582
出願日
2023-12-11
発明の名称
作業装置の制御装置、及び、制御方法
出願人
日立GEニュークリア・エナジー株式会社
代理人
弁理士法人磯野国際特許商標事務所
主分類
B25J
9/14 20060101AFI20250616BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】長時間連続して使用した場合であっても制御精度を保つ。
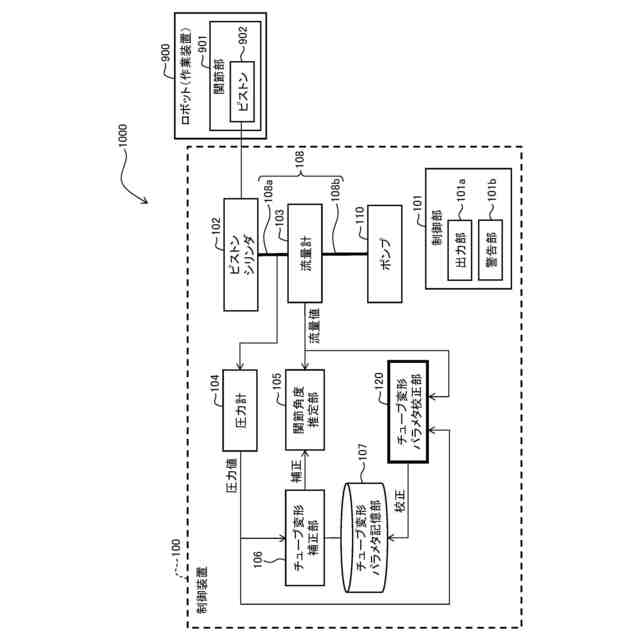
【解決手段】制御装置100は、作業装置(ロボット900)の関節部901を駆動させるピストン902に液体を介して圧力を伝送する液圧伝送チューブ108と、液体に圧力を印加する圧力印加手段(ポンプ110)と、液体の圧力値を計測する圧力計104と、液体の流量値を計測する流量計103と、予め用意されたチューブ変形パラメタを用いて液体の圧力値に応じた液体の流量変動値を算出して液体の流量値を補正するチューブ変形補正部106と、補正後の流量値から関節角度を推定する関節角度推定部105と、圧力印加開始前の流量値の計測値と圧力印加終了後の流量値の計測値から現在のチューブ変形量を算出して、チューブ変形パラメタを校正するパラメタ校正部(チューブ変形パラメタ校正部120)と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
作業装置の関節部を駆動させるピストンに液体を介して圧力を伝送する液圧伝送チューブと、
前記液体に圧力を印加する圧力印加手段と、
前記液体の圧力値を計測する圧力計と、
前記液体の流量値を計測する流量計と、
予め用意されたチューブ変形パラメタを用いて前記液体の圧力値に応じた液体の流量変動値を算出して前記液体の流量値を補正するチューブ変形補正部と、
補正後の流量値から関節角度を推定する関節角度推定部と、
圧力印加開始前の前記流量値の計測値と圧力印加終了後の前記流量値の計測値から現在のチューブ変形量を算出して、前記チューブ変形パラメタを校正するパラメタ校正部と、を有する
ことを特徴とする作業装置の制御装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の作業装置の制御装置において、
前記パラメタ校正部は、前記ピストンを動作させることで関節角度の上限角度パラメタと下限角度パラメタを取得して、前記上限角度パラメタと前記下限角度パラメタを用いて前記チューブ変形パラメタを校正する
ことを特徴とする作業装置の制御装置。
【請求項3】
請求項1に記載の作業装置の制御装置において、
前記パラメタ校正部は、現在のクリープコンプライアンスと、前記液体に任意の時間圧力をかけ続けた場合に取得されるクリープコンプライアンスとを比較することで、前記チューブ変形パラメタを校正する
ことを特徴とする作業装置の制御装置。
【請求項4】
請求項1に記載の作業装置の制御装置において、
前記パラメタ校正部は、前記液体に圧力をかける前と前記液体から圧力を抜いた後の流量値の差から計測される残留クリープと圧力の計測値から推定される推定歪み量とを比較することで、前記チューブ変形パラメタを校正する
ことを特徴とする作業装置の制御装置。
【請求項5】
請求項1に記載の作業装置の制御装置において、
チューブ変形パラメタを記憶するチューブ変形パラメタ記憶部と、
任意の情報を外部機器に出力する出力部と、を有し、
前記チューブ変形パラメタ記憶部は、前記チューブ変形パラメタのクリープコンプライアンスの各係数値と初期状態とを比較した結果を時系列で記憶しており、
前記出力部は、前記チューブ変形パラメタのクリープコンプライアンスの各係数値が閾値を超える場合の予想時間を外部機器に出力する
ことを特徴とする作業装置の制御装置。
【請求項6】
請求項1に記載の作業装置の制御装置において、
警告を外部機器に出力する警告部を有し、
前記警告部は、前記チューブ変形パラメタのクリープコンプライアンスの各係数値と初期状態とを比べて閾値を超えた時に、警告を外部機器に出力する
ことを特徴とする作業装置の制御装置。
【請求項7】
請求項1に記載の作業装置の制御装置において、
前記液圧伝送チューブの液温を計測する温度計を有し、
前記チューブ変形補正部は、前記温度計で計測された液温に応じた温度補正係数によるクリープコンプライアンスを校正する
ことを特徴とする作業装置の制御装置。
【請求項8】
請求項1に記載の作業装置の制御装置において、
前記液圧伝送チューブを覆う保温材を有し、
前記保温材は、前記液圧伝送チューブと外気とを隔離して、前記液圧伝送チューブ内の液体と前記外気との間で熱の移動が発生することを抑制する
ことを特徴とする作業装置の制御装置。
【請求項9】
請求項1に記載の作業装置の制御装置において、
前記液圧伝送チューブの品質の劣化を判定する劣化判定部を有する
ことを特徴とする作業装置の制御装置。
【請求項10】
液体を介して圧力がピストンに伝送されることで駆動する関節部を有する作業装置の制御方法であって、
圧力印加手段によって前記液体に印加された圧力を液圧伝送チューブを介して前記ピストンに伝送する圧力伝送工程と、
予め用意されたチューブ変形パラメタを用いて前記液体の圧力値に応じた液体の流量変動値を算出して前記液体の流量値を補正するチューブ変形補正工程と、
補正後の流量値から関節角度を推定する関節角度推定工程と、
圧力印加開始前の前記流量値の計測値と圧力印加終了後の前記流量値の計測値から現在のチューブ変形量を算出して、前記チューブ変形パラメタを校正するパラメタ校正工程と、を含む
ことを特徴とする作業装置の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業装置の制御装置、及び、制御方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、人間が直接作業することが困難な場所に対して、遠隔でロボット(作業装置)を操作して作業を行う遠隔制御システムが提供されている。人間が直接作業することが困難な場所での作業としては、例えば、高放射線量等の過酷環境下での作業があり、その一例として、原子力発電所での廃炉作業や宇宙空間での作業等がある。このような過酷環境下でロボットに作業を行わせようとすると、ロボットの駆動に用いるステップモータや制御に用いる半導体センサ等の精密なエレクトロニクス機器が放射線に弱いため、長時間使用することが困難である。そのため、モータやセンサ等のエレクトロニクス機器を極力使用しない遠隔制御システムの提供が望まれている。そこで、液圧システムによりピストンを駆動させて、ピストンに連動してロボットの関節部を動作させる遠隔制御システムが提案されている。この遠隔制御システムは、長いチューブを介して制御装置からピストンに液体を送り込み、送り込んだ液体の流量(液量)を制御装置が管理することで、ロボットの関節部の開閉角度(関節角度)を制御する。このような遠隔制御システムは、安全な環境である遠隔地に制御装置を設置することができる。また、モータやセンサ等のエレクトロニクス機器の点数を低減することができる。
【0003】
遠隔制御システムでは、作業空間でロボットを自由に動作させるために、柔軟な樹脂製のチューブが使用される。しかしながら、樹脂は、液体の圧力を受けることにより、弾性変形や粘性変形を起こしてしまう特性がある。弾性変形は、圧力が除荷されれば直ぐに回復して元の形状に戻る。しかしながら、粘性変形は、回復に時間がかかり、また可塑変形が残ることで元の形状に戻らなくなる可能性もある。制御装置は、ロボットの動作制御を精度よく行うために、このようなチューブの特性を考慮して、ピストンに送り込む液体の流量(液量)を補正する。
【0004】
この種の技術に関連して、例えば特許文献1に開示されたものがある。特許文献1は、予めアームのクリープ変形による撓み量を累積時間に対応付けて記憶し、実際に動作した累積時間を計測して、記憶した撓み量に基づいて、ロボットモデルを補正する技術を開示している。
【先行技術文献】
【特許文献】
【0005】
特許6989542号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示された技術は、例えば、想定外の圧力の印加が発生したり圧力の計測誤差が発生したりすると、予め記憶した撓み量と累積時間による撓み量との間に誤差が発生する。この場合に、時間とともに誤差が蓄積し、補正ずれが拡大していく。そのため、長時間連続してロボット(作業装置)を使用した場合に、制御精度を保つことが難しい。特に高放射線量等の過酷環境下では、誤差が蓄積し易く、補正ずれが拡大し易い。そのため、特に高放射線量等の過酷環境下では、制御精度を保つことが非常に難しい。
【0007】
本発明は、前記した課題を解決するためになされたものであり、長時間連続して使用した場合であっても、制御精度を保つ作業装置の制御装置、及び、制御方法を提供することを主な目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成するため、本発明は、作業装置の制御装置であって、作業装置の関節部を駆動させるピストンに液体を介して圧力を伝送する液圧伝送チューブと、前記液体に圧力を印加する圧力印加手段と、前記液体の圧力値を計測する圧力計と、前記液体の流量値を計測する流量計と、予め用意されたチューブ変形パラメタを用いて前記液体の圧力値から前記液体の流量値を補正するチューブ変形補正部と、補正後の流量値から関節角度を推定する関節角度推定部と、圧力印加開始前の前記流量値の計測値と圧力印加終了後の前記流量値の計測値から現在のチューブ変形量を算出して、前記チューブ変形パラメタを校正するパラメタ校正部と、を有する構成とする。
その他の手段は、後記する。
【発明の効果】
【0009】
本発明によれば、長時間連続して使用した場合であっても、制御精度を保つ作業装置の制御装置、及び、制御方法を提供することができる。
【図面の簡単な説明】
【0010】
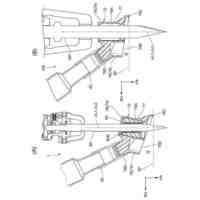
第1実施形態に係る制御装置を備える遠隔作業システムの概略構成図である。
制御装置の動作の一例を表すフローチャートである。
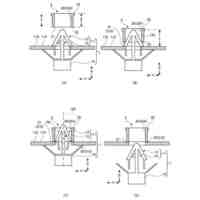
液圧伝送チューブの変形例の説明図である。
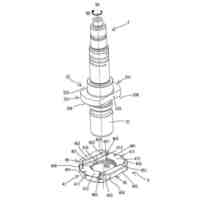
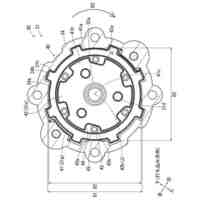
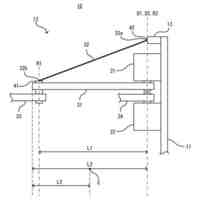
制御装置の駆動機構の模式構成図である。
流量の変動履歴の一例を示す説明図である。
液圧伝送チューブの歪みによる流量値ドリフトの時間変化の説明図である。
第2実施形態に係る制御装置を備える遠隔作業システムの概略構成図である。
第3実施形態に係る制御装置を備える遠隔作業システムの概略構成図である。
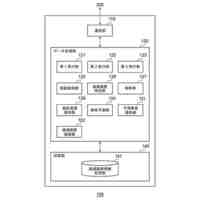
コンピュータのブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
19日前
株式会社ジャノメ
ロボット
8日前
住友重機械工業株式会社
教示装置
5日前
個人
ペグハンマおよびペグハンマ用部品
12日前
株式会社ダイヘン
搬送装置
12日前
川崎重工業株式会社
ロボット
6日前
工機ホールディングス株式会社
作業機
5日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
5日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
12日前
住友重機械工業株式会社
支援装置
12日前
ホシデン株式会社
分解用治具
12日前
アピュアン株式会社
衝撃工具
14日前
オークラ輸送機株式会社
ハンド装置
27日前
株式会社マキタ
電気機器
6日前
工機ホールディングス株式会社
作業機
8日前
工機ホールディングス株式会社
作業機
8日前
工機ホールディングス株式会社
作業機
8日前
工機ホールディングス株式会社
作業機
8日前
川崎重工業株式会社
ロボットシステム
28日前
株式会社リコー
多関節ロボット
12日前
株式会社ジャノメ
ロボット
1か月前
SMC株式会社
ベルヌーイグリッパ
8日前
セイコーエプソン株式会社
ロボット
22日前
工機ホールディングス株式会社
集塵装置及び作業機
5日前
株式会社マキタ
回転工具
29日前
株式会社マキタ
電動工具
26日前
住友重機械工業株式会社
減速装置選定支援装置
12日前
個人
工具、工具セット、部材取外し方法
22日前
オムロン株式会社
ロボット
1か月前
SMC株式会社
コンプライアンスユニット
1か月前
日産自動車株式会社
ロックプレートの圧入治具
6日前
オムロン株式会社
ロボット
1か月前
株式会社永木精機
締結用回動体
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ