TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025092586
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2025053461,2023214403
出願日
2025-03-27,2021-01-27
発明の名称
車両制御装置、車両制御方法、及び車両制御システム
出願人
Astemo株式会社
代理人
個人
,
個人
主分類
B60W
30/095 20120101AFI20250612BHJP(車両一般)
要約
【課題】車両の乗り心地や快適性の向上が図れる、車両制御装置、車両制御方法、及び車両制御システムを提供する。
【解決手段】本発明に係る車両制御装置、車両制御方法、及び車両制御システムは、認知及び判断を行う認知判断部から指示される目標指令である、車両の前方の第1走行領域を取得し、前記第1走行領域において、前記車両の走行に関する諸元に基づいた前記車両の速度及び走行軌道で前記車両を走行させるための制御指令を出力し、前記車両が前記第1走行領域を走行中に、前記認知判断部から指示される目標指令である、前記車両の前方で前記第1走行領域と一部重複する領域を有する第2走行領域を取得し、前記第2走行領域において、前記車両の走行に関する諸元に基づいた前記車両の速度及び走行軌道で前記車両を走行させるための制御指令を出力する。
【選択図】図5
特許請求の範囲
【請求項1】
入力した情報に基づいて演算を行って演算結果を出力するコントロール部を備える車両制御装置であって、
前記コントロール部は、
認知及び判断を行う認知判断部から指示される目標指令である、車両の前方の第1走行領域を取得し、
前記第1走行領域において、前記車両の走行に関する諸元に基づいた前記車両の速度及び走行軌道で前記車両を走行させるための制御指令を出力し、
前記車両が前記第1走行領域を走行中に、前記認知判断部から指示される目標指令である、前記車両の前方で前記第1走行領域と一部重複する領域を有する第2走行領域を取得し、
前記第2走行領域において、前記車両の走行に関する諸元に基づいた前記車両の速度及び走行軌道で前記車両を走行させるための制御指令を出力する、
車両制御装置。
続きを表示(約 720 文字)
【請求項2】
車両制御方法であって、
認知及び判断を行う認知判断部から指示される目標指令である、車両の前方の第1走行領域を取得し、
前記第1走行領域において、前記車両の走行に関する諸元に基づいた前記車両の速度及び走行軌道で前記車両を走行させるための制御指令を出力し、
前記車両が前記第1走行領域を走行中に、前記認知判断部から指示される目標指令である、前記車両の前方で前記第1走行領域と一部重複する領域を有する第2走行領域を取得し、
前記第2走行領域において、前記車両の走行に関する諸元に基づいた前記車両の速度及び走行軌道で前記車両を走行させるための制御指令を出力する、
車両制御方法。
【請求項3】
認知及び判断を行う認知判断部と、
コントロール部であって、
前記認知判断部から指示される目標指令である、車両の前方の第1走行領域を取得し、
前記第1走行領域において、前記車両の走行に関する諸元に基づいた前記車両の速度及び走行軌道で前記車両を走行させるための制御指令を出力し、
前記車両が前記第1走行領域を走行中に、前記認知判断部から指示される目標指令である、前記車両の前方で前記第1走行領域と一部重複する領域を有する第2走行領域を取得し、
前記第2走行領域において、前記車両の走行に関する諸元に基づいた前記車両の速度及び走行軌道で前記車両を走行させるための制御指令を出力する、
コントロール部と、
前記コントロール部から出力された前記制御指令を取得し、前記車両を走行させるアクチュエータ部と、
を備える車両制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置、車両制御方法、及び車両制御システムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
特許文献1に開示される車両の操舵制御装置は、走行車線情報と自車両の走行状態とに応じて前方注視点距離を設定し、この前方注視点距離と自車両の走行状態とに基づいて、自車両を走行車線に沿って追従走行させるための第1フィードバックゲインを算出し、第1フィードバックゲインと安定性パラメータとに基づいて、現在点における自車両の横変位を補正するための第2フィードバックゲインを算出し、第1フィードバックゲインと第2フィードバックゲインと前方注視点横変位と現在点横変位とを用いて目標ヨーレートを算出し、この目標ヨーレートに応じて自車両の操舵角を算出する。
【先行技術文献】
【特許文献】
【0003】
特開2016-107658号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、車両周囲の状況などを認知及び判断する認知判断部が、認知及び判断の結果に基づき目標走行軌道を生成し、車両の運動を制御する車両制御部が、前記目標走行軌道に沿って車両が走行するように車両の運動を制御するシステムの場合、目標走行軌道によっては車両の乗り心地や快適性が損なわれるおそれがあった。
【0005】
本発明は、従来の実情に鑑みてなされたものであり、その目的は、車両の乗り心地や快適性の向上が図れる、車両制御装置、車両制御方法、及び車両制御システムを提供することにある。
【課題を解決するための手段】
【0006】
本発明によれば、その1つの態様において、入力した情報に基づいて演算を行って演算結果を出力するコントロール部を備える車両制御装置であって、前記コントロール部は、認知及び判断を行う認知判断部から指示される目標指令である、車両の前方の第1走行領域を取得し、前記第1走行領域において、前記車両の走行に関する諸元に基づいた前記車両の速度及び走行軌道で前記車両を走行させるための制御指令を出力し、前記車両が前記第1走行領域を走行中に、前記認知判断部から指示される目標指令である、前記車両の前方で前記第1走行領域と一部重複する領域を有する第2走行領域を取得し、前記第2走行領域において、前記車両の走行に関する諸元に基づいた前記車両の速度及び走行軌道で前記車両を走行させるための制御指令を出力する。
【発明の効果】
【0007】
本発明によれば、車両の乗り心地や快適性の向上が図れる。
【図面の簡単な説明】
【0008】
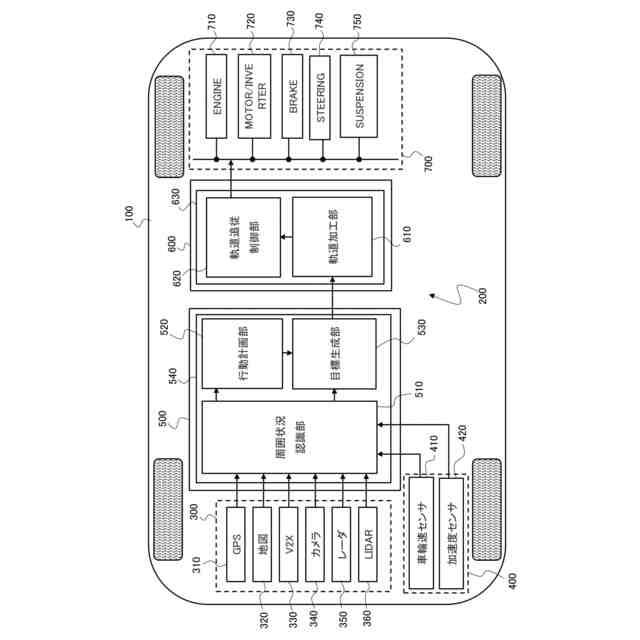
車両制御システムを示すブロック図である。
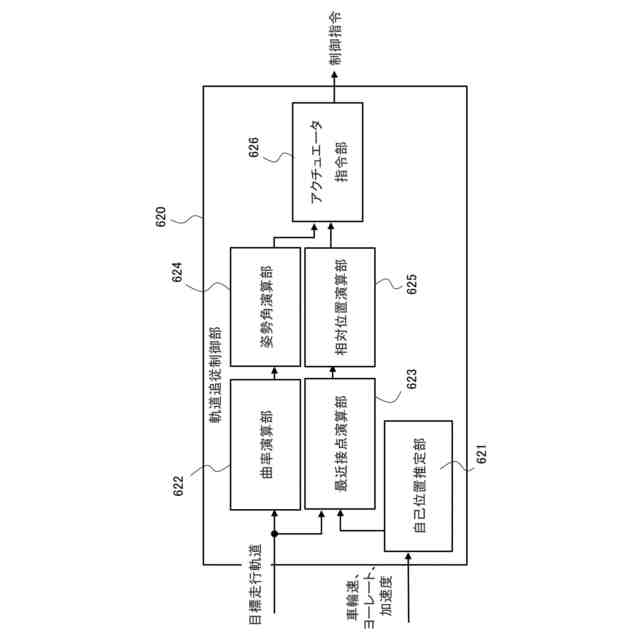
軌道追従制御部を示すブロック図である。
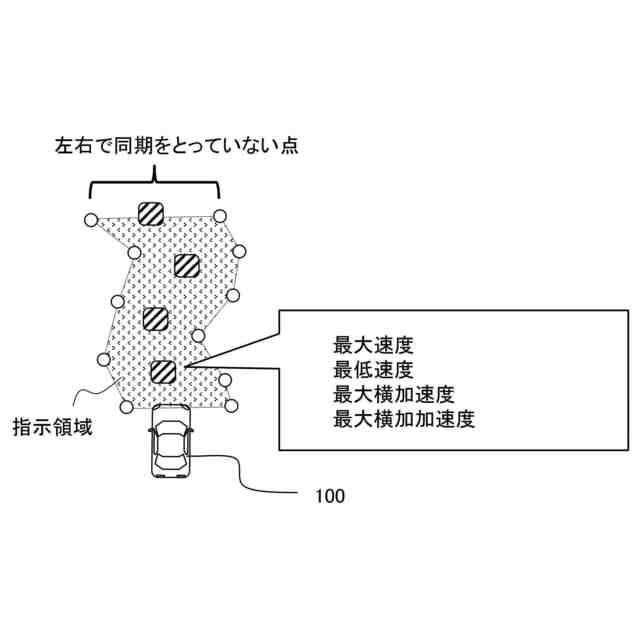
目標指令の内容の一態様を示す図である。
目標指令の内容の一態様を示す図である。
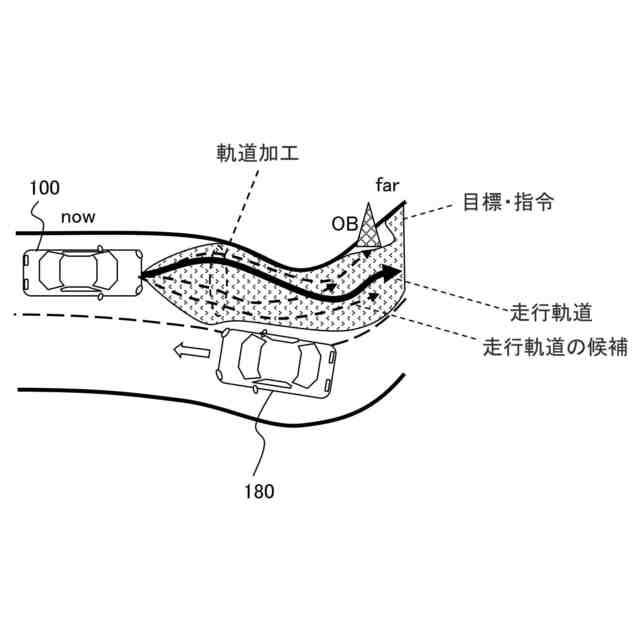
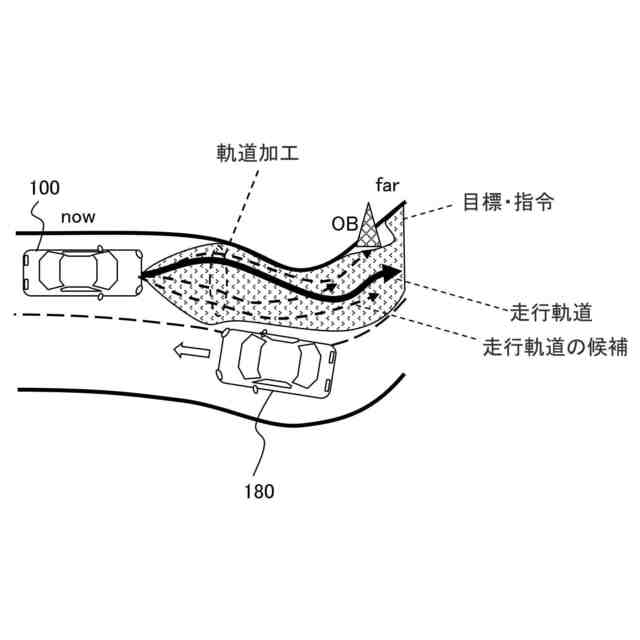
目標走行領域内での軌道加工の様子を示す図である。
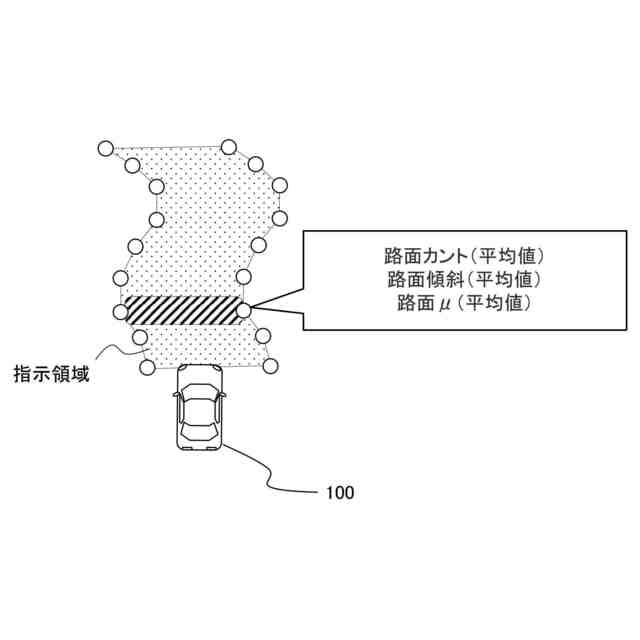
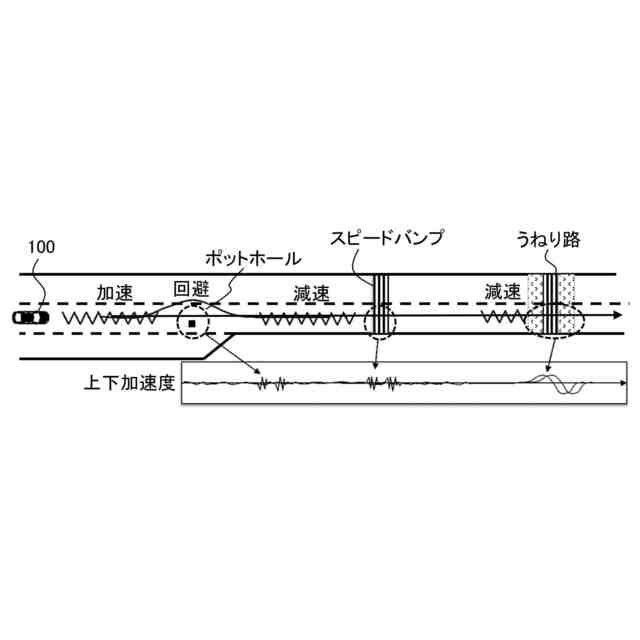
路面情報に応じた目標走行軌跡及び目標車速の設定例を示す図である。
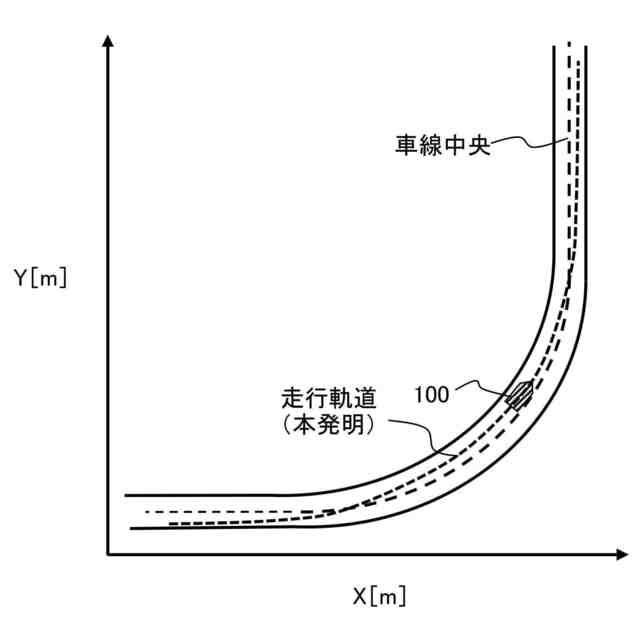
目標走行領域に基づく走行軌道と車線中央との軌跡の違いを示す図である。
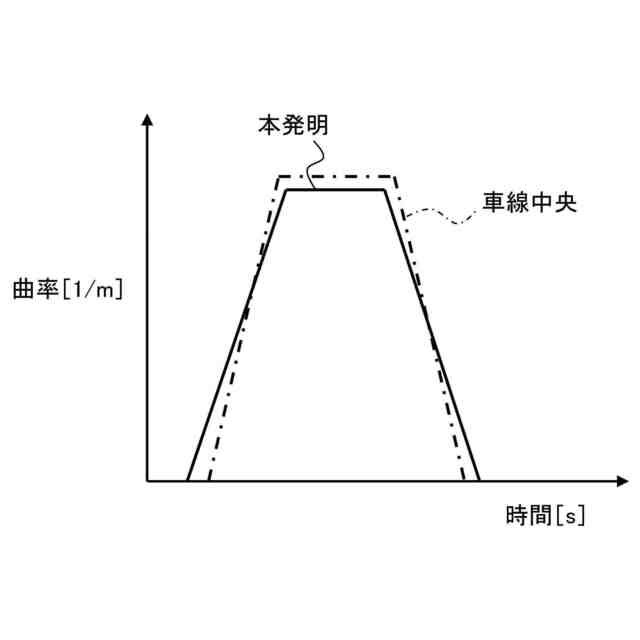
走行軌道による曲率の違いを示す図である。
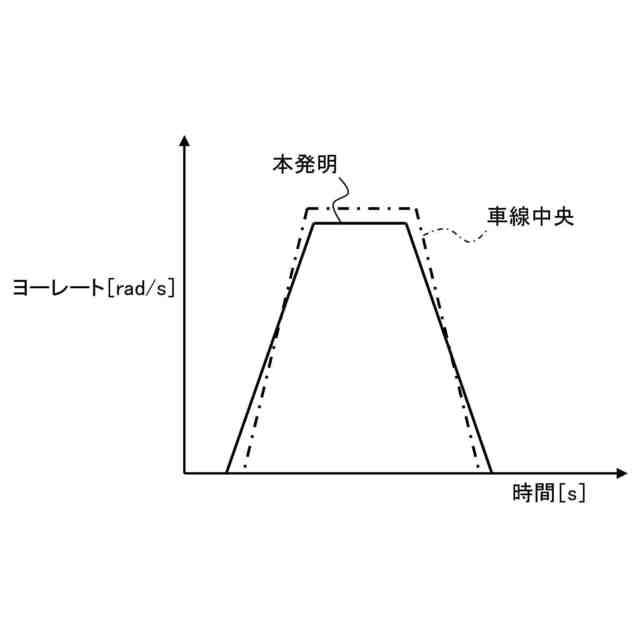
走行軌道によるヨーレートの違いを示す図である。
走行軌道による横加速度の違いを示す図である。
走行軌道による横加加速度の違いを示す図である。
目標走行領域の更新処理を示す図である。
目標走行領域の基本設定を示す図である。
オブジェクト領域と目標走行領域との相関を示す図である。
オブジェクトの状況変化による目標走行領域の更新を示す図である。
オブジェクトの状況変化後における目標走行領域の更新を示す図である。
車線をはみ出して目標走行領域が設定される様子を示す図である。
衝突リスク領域(詳細には、飛び出し警戒領域)と目標走行領域との相関を示す図である。
衝突リスク領域(詳細には、路肩のオブジェクト)と目標走行領域との相関を示す図である。
目標走行領域内にオブジェクトが複数存在する場合での走行軌道の設定を示す図である。
目標走行領域内にオブジェクトと路面カントが存在する場合での走行軌道の設定を示す図である。
目標走行領域内にオブジェクトと低μ路面が存在する場合での走行軌道の設定を示す図である。
認知判断部が指示する推奨軌道を走行軌道とした場合を示す図である。
認知判断部が指示する推奨軌道上のオブジェクトが存在する場合の走行軌道を示す図である。
認知判断部が指示する推奨軌道に乗り心地などに関する悪化要因がある場合の走行軌道を示す図である。
車両が走行する可能性を含めた領域としての目標走行軌道を説明するための図である。
図26の地点Iでの走行可能性の設定状態を示す線図である。
図26の地点IIでの走行可能性の設定状態を示す線図である。
図26の地点IIIでの走行可能性の設定状態を示す線図である。
2つのマイクロコンピュータを搭載した1つコントロールユニットを備えた車両制御システムのブロック図である。
1つのマイクロコンピュータに、認知判断部としての第1のロジックとコントロール部としての第2のロジックとを搭載した車両制御システムのブロック図である。
2つのマイクロコンピュータに対する機能分担の一態様を示す車両制御システムのブロック図である。
【発明を実施するための形態】
【0009】
以下、本発明に係る車両制御装置、車両制御方法、及び車両制御システムの実施形態を、図面に基づいて説明する。
図1は、車両制御システム200の一態様を示すブロック図であり、車両制御システム200は、4輪自動車などの車両100に搭載されて車両100の運動を制御するシステムである。
【0010】
車両制御システム200は、外界認識部300、車両運動検出部400、自動運転コントロールユニット500と、車両運動コントロールユニット600と、アクチュエータ部700を備える。
なお、後述するように、自動運転コントロールユニット500は、車両運動コントロールユニット600に対して目標指令を与える上位ユニットであり、車両運動コントロールユニット600は、自動運転コントロールユニット500から目標指令を取得する下位ユニットである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
24日前
個人
車窓用防虫網戸
1か月前
個人
警告装置
2か月前
個人
小型EVシステム
2か月前
日本精機株式会社
ケース
2か月前
個人
車輪清掃装置
28日前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
照明装置
3か月前
日本精機株式会社
表示装置
3か月前
個人
キャンピングトライク
11日前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
個人
アンチロール制御装置
3か月前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
18日前
個人
車両用スリップ防止装置
2日前
個人
ブレーキシステム
2か月前
個人
キャンピングトレーラー
11日前
個人
ワイパーゴム性能保持具
1か月前
個人
アクセルのソフトウェア
1日前
株式会社松華
懸架装置
3か月前
個人
自走式立体型洗車場
3か月前
個人
ステージカー
3か月前
株式会社クラベ
ヒータユニット
1か月前
個人
自動車ドア開度規制ベルト
2か月前
井関農機株式会社
収穫作業車両
1か月前
横浜ゴム株式会社
タイヤ
2か月前
日本精機株式会社
車両用投影装置
18日前
日本精機株式会社
車両用投影装置
18日前
株式会社ユーシン
照明装置
1か月前
株式会社ユーシン
照明装置
2か月前
トヨタ自動車株式会社
車両
15日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用表示装置
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ