TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025087297
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023201856
出願日
2023-11-29
発明の名称
作業機械の掘削制御システム、及び、そのためのプログラム
出願人
株式会社大林組
代理人
個人
,
個人
主分類
E02F
3/43 20060101AFI20250603BHJP(水工;基礎;土砂の移送)
要約
【課題】演算負荷の小さいシンプルなデータ処理で掘削の制御ができる作業機械の掘削制御システムを提供する。
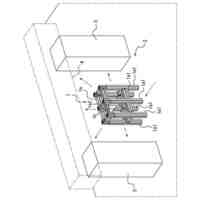
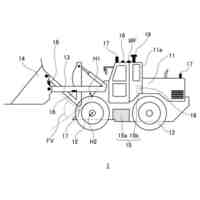
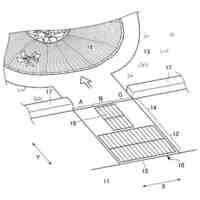
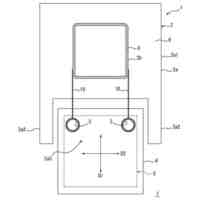
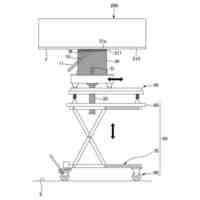
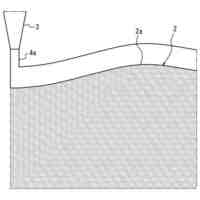
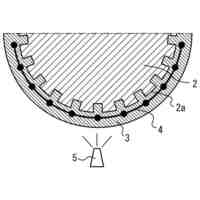
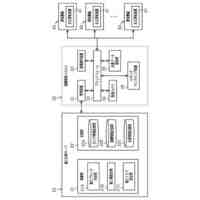
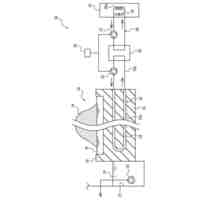
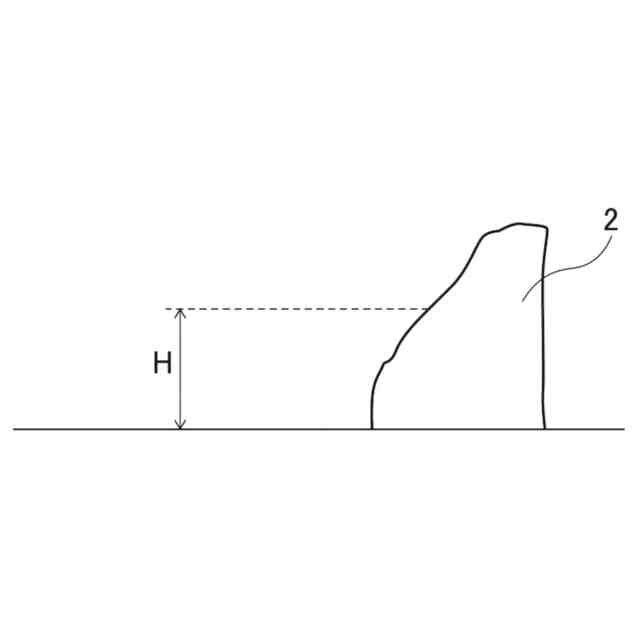
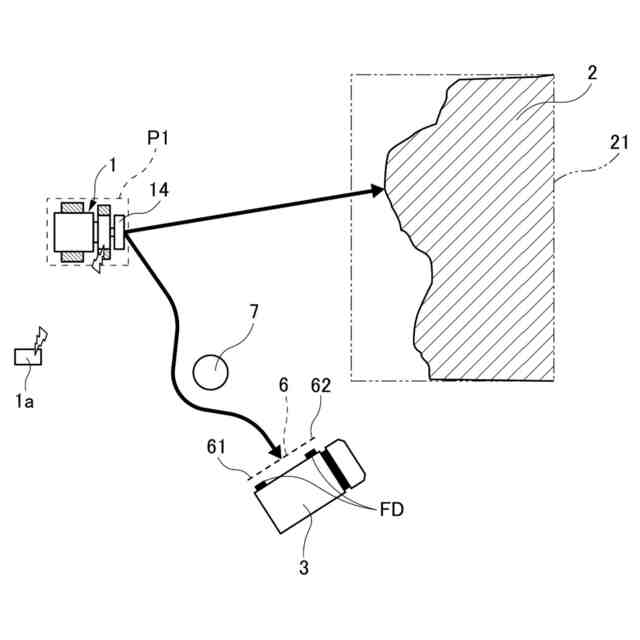
【解決手段】本発明の作業機械の掘削制御システムは、作業機械1に設けられ、バケット14を有する作業機械1を制御する制御部15と、作業機械1に設けられ、掘削対象2までの距離に対応する距離関連データを取得する計測部と、を備え、制御部15が、掘削位置に向けた作業機械1の移動と、掘削位置の掘削対象2の掘削を行うバケット14の駆動と、を制御し、掘削位置が、距離関連データに基づく、作業機械1に近い掘削対象の位置であり、距離関連データが、掘削対象2の所定の高さ位置Hでの水平方向のデータである。
【選択図】図2
特許請求の範囲
【請求項1】
作業機械の掘削制御システムであって、
前記作業機械に設けられ、バケットを有する前記作業機械を制御する制御部と、
前記作業機械に設けられ、掘削対象までの距離に対応する距離関連データを取得する計測部と、を備え、
前記制御部が、
掘削位置に向けた前記作業機械の移動と、
前記掘削位置の前記掘削対象の掘削を行う前記バケットの駆動と、を制御し、
前記掘削位置が、前記距離関連データに基づく、前記作業機械に近い前記掘削対象の位置であり、
前記距離関連データが、前記掘削対象の所定の高さ位置での水平方向のデータであることを特徴とする作業機械の掘削制御システム。
続きを表示(約 600 文字)
【請求項2】
前記作業機械は、前記掘削対象の範囲と動作開始位置を指定した地図情報を備え、
前記動作開始位置は、前記作業機械が前記掘削位置に移動する前に、前記距離関連データを取得するための位置であり、
前記計測部が、前記動作開始位置で、前記掘削対象の範囲内の前記距離関連データを取得することを特徴とする請求項1に作業機械の掘削制御システム。
【請求項3】
前記所定の高さ位置が、前記掘削対象の状態に合わせて、変更可能であることを特徴とする請求項1又は請求項2に記載の作業機械の掘削制御システム。
【請求項4】
前記計測部が、3D-LiDARであり、
前記距離関連データが、点群データであることを特徴とする請求項1又は請求項2に記載の作業機械の掘削制御システム。
【請求項5】
バケットを有する作業機械を制御する制御部に対して、
計測部を用いて、掘削対象の所定の高さ位置での水平方向の前記掘削対象までの距離に関連した距離関連データを取得させる処理と、
前記作業機械を、前記距離関連データに基づく、前記作業機械に近い前記掘削対象の位置である掘削位置に向けて移動させる処理と、
前記バケットを駆動して、前記バケットに前記掘削位置の前記掘削対象の掘削を行わせる処理と、
を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の掘削制御システム、及び、プログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、1台の自動機械で掘削から積み込みまでの一連の作業を自動的にかつ効率よくなし得る自動掘削機として、掘削機から掘削対象物および積み込み対象までの距離を求めるための計測器と、計測器の出力に基づき掘削対象物の立体的な形状を認識する掘削対象認識手段と、認識した掘削対象物の立体形状に基づき掘削目標位置を演算する掘削目標位置演算手段と、計測器の出力に基づき掘削機に対する積み込み対象の相対位置および積み込み対象に対する掘削機の相対姿勢を演算し、演算された相対位置に基づき積み込み目標位置を演算する積み込み目標位置演算手段と、演算された掘削目標位置および積み込み目標位置に掘削機または作業機を自動位置決めする自動位置決め手段と、掘削目標位置で掘削対象物を自動掘削する自動掘削制御手段と、積み込み目標位置で掘削物を積み込み対象に自動積み込みする自動積み込み制御手段と、を具える自動掘削機が開示される。
【先行技術文献】
【特許文献】
【0003】
特開平10-088625号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に開示されている自動掘削機では、掘削目標位置を求めるために、まず、自動掘削機の左側に設けられた左カメラと右側に設けられた右カメラとの2台のカメラを用いて、ステレオ法に基づいた自動掘削機から掘削対象物までの距離マップデータ(3次元座標で表される距離のマップデータ)を作成している。
【0005】
具体的には、左カメラ画像に対し、複数の点マトリックス(i,j)を設定し、左カメラ画像の1つの点(i,j)の画像が右カメラ画像のうちのどの点に対応するかをパターンマッチングの手法を用いて探査する。
【0006】
次に、対応する点が求められると、これら両点の画像上での位置を求め、これらの位置から視差dを求める。
そして、その視差dを「Yp=B・f/d」の式に代入して、点(i,j)から掘削機までの距離データを求める。
なお、Ypは認識対象物PのY方向位置、dは視差、Bはカメラ間の距離、fは両カメラの焦点距離fである。
【0007】
そして、この処理を設定した全ての点マトリックス(i,j)について行い、距離マップデータを作成している。
【0008】
上述のように、点マトリクスの1つの距離を求めるためには、パターンマッチングを行う必要があり、それを全ての点で行わなければならないため、処理負荷の大きい処理を行っている。
このため、距離マップデータを作成するために、高機能な演算処理装置を必要とし、コストが高くなるという問題がある。
【0009】
本発明は、このような事情に鑑みてなされたものであり、演算負荷の小さいシンプルなデータ処理で掘削の制御ができる作業機械の掘削制御システム、及び、そのためのプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明は、上記目的を達成するために以下の構成によって把握される。
(1)本発明の作業機械の掘削制御システムは、前記作業機械に設けられ、バケットを有する前記作業機械を制御する制御部と、前記作業機械に設けられ、掘削対象までの距離に対応する距離関連データを取得する計測部と、を備え、前記制御部が、掘削位置に向けた前記作業機械の移動と、前記掘削位置の前記掘削対象の掘削を行う前記バケットの駆動と、を制御し、前記掘削位置が、前記距離関連データに基づく、前記作業機械に近い前記掘削対象の位置であり、前記距離関連データが、前記掘削対象の所定の高さ位置での水平方向のデータである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大林組
歩道橋
1か月前
株式会社大林組
施工方法
17日前
株式会社大林組
作業機械
9日前
株式会社大林組
基礎構造
2か月前
株式会社大林組
雨水桝蓋
2日前
株式会社大林組
施工方法
17日前
株式会社大林組
雨除け構造
1か月前
株式会社大林組
ブラインド
22日前
株式会社大林組
免震構造物
2か月前
株式会社大林組
免震構造物
20日前
株式会社大林組
人工地盤構造
22日前
株式会社大林組
流出防止治具
10日前
株式会社大林組
空調システム
1か月前
株式会社大林組
耐震間柱構造
2か月前
株式会社大林組
カッタビット
1か月前
株式会社大林組
排水システム
1か月前
株式会社大林組
免震建物構造
1か月前
株式会社大林組
カッタビット
1か月前
株式会社大林組
建物の外壁構造
1か月前
株式会社大林組
物体の設置方法
29日前
株式会社大林組
パイプ保護構造
1か月前
株式会社大林組
周壁材形成方法
2か月前
株式会社大林組
耐セメント安定液
28日前
株式会社大林組
表面処理システム
1か月前
株式会社大林組
表面処理システム
1か月前
株式会社大林組
表面処理システム
1か月前
株式会社大林組
建築物の躯体構造
1か月前
株式会社大林組
タワーの支持構造
1か月前
株式会社大林組
構造体の製造方法
24日前
株式会社大林組
構造体の製造方法
24日前
株式会社大林組
タワーの支持構造
1か月前
株式会社大林組
雨水流出抑制構造
1か月前
株式会社大林組
施工管理システム
23日前
株式会社大林組
雪氷冷房システム
1か月前
株式会社大林組
構造体の製造方法
24日前
株式会社大林組
開口部の仕上げ構造
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ