TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087010
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023201355
出願日
2023-11-29
発明の名称
トレーラ走行経路出力装置
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
B60R
99/00 20090101AFI20250603BHJP(車両一般)
要約
【課題】トラクタおよびトレーラの周辺の状況に対応した目標走行経路を出力するトレーラ走行経路出力装置を提供する。
【解決手段】目標走行経路を生成して出力するトレーラ走行経路生成器20を備え、トレーラ走行経路生成器20は、走行モードがトレーラ3を駐車させるパーキングモードのときに目標走行経路として駐車目標走行経路を生成して出力し、駐車目標走行経路は、駐車スペース前方距離があらかじめ定められた距離しきい値以上のときはトレーラ3が後退するときの経路が直線である第一目標経路であり、駐車スペース前方距離が距離しきい値よりも小さいときはトレーラ3が後退するときの経路がクロソイド曲線を含む第二目標経路であることを特徴とする。
【選択図】図2
特許請求の範囲
【請求項1】
トラクタに連結されたトレーラを移動させるための目標走行経路を生成して出力するトレーラ走行経路出力装置であって、
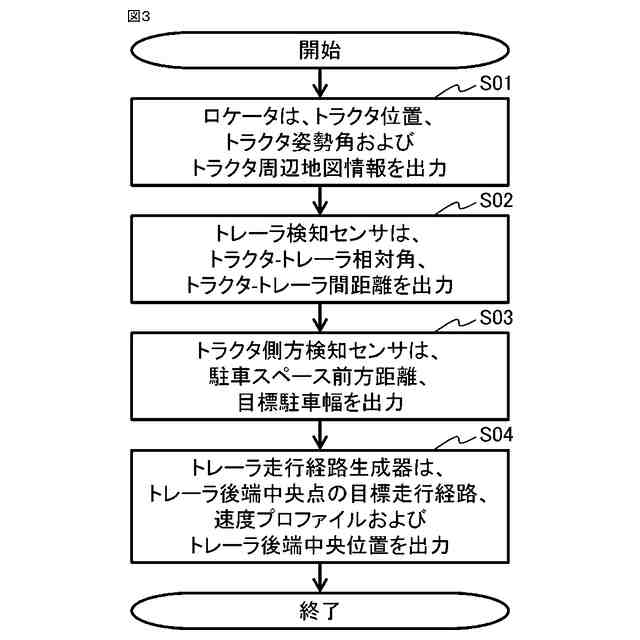
前記トラクタの位置情報であるトラクタ位置、前記トラクタの姿勢角であるトラクタ姿勢角、および、前記トラクタの周辺の地図の情報であるトラクタ周辺地図情報を出力するロケータと、
前記トラクタおよび前記トレーラの間の相対角度であるトラクタ-トレーラ相対角、および、前記トラクタおよび前記トレーラの間の距離であるトラクタ-トレーラ間距離を出力するトレーラ検知センサと、
目標駐車スペースの幅である目標駐車幅、および、前記目標駐車スペースの前方端から走行不可領域までの前方方向における距離である駐車スペース前方距離を出力するトラクタ側方検知センサと、
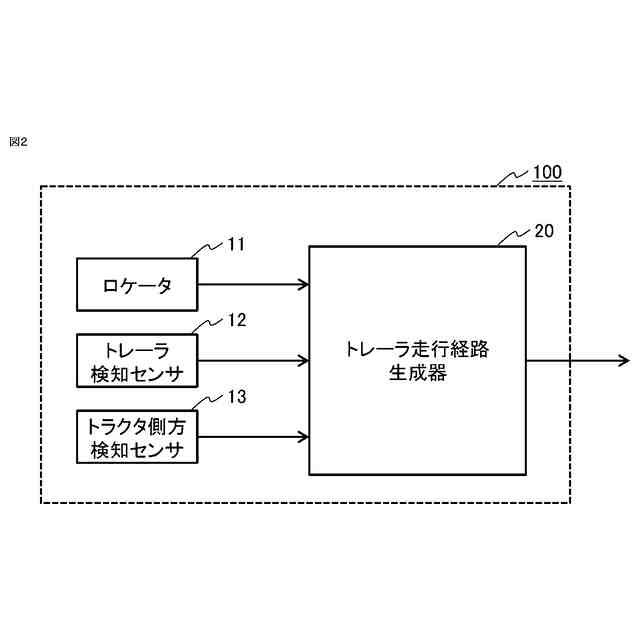
前記ロケータ、前記トレーラ検知センサおよび前記トラクタ側方検知センサの出力から、前記トレーラの後端部の中央のトレーラ後端中央位置にあるトレーラ後端中央点の目標走行経路を生成して出力するトレーラ走行経路生成器とを備え、
前記トレーラ走行経路生成器は、走行モードが前記トレーラを駐車させるパーキングモードのときに前記目標走行経路として駐車目標走行経路を生成して出力し、
前記駐車目標走行経路は、前記駐車スペース前方距離があらかじめ定められた距離しきい値以上のときは前記トレーラが後退するときの経路が直線である第一目標経路であり、前記駐車スペース前方距離が前記距離しきい値よりも小さいときは前記トレーラが後退するときの経路がクロソイド曲線を含む第二目標経路であることを特徴とするトレーラ走行経路出力装置。
続きを表示(約 950 文字)
【請求項2】
前記トレーラ走行経路生成器は、
前記トレーラ後端中央点の位置情報である前記トレーラ後端中央位置の情報を出力し、
前記駐車目標走行経路が前記第一目標経路のときは、前記第一目標経路に対応した第一速度プロファイルを出力し、
前記駐車目標走行経路が前記第二目標経路のときは、前記第二目標経路に対応した第二速度プロファイルを出力することを特徴とする請求項1に記載のトレーラ走行経路出力装置。
【請求項3】
前記トレーラ走行経路生成器は、
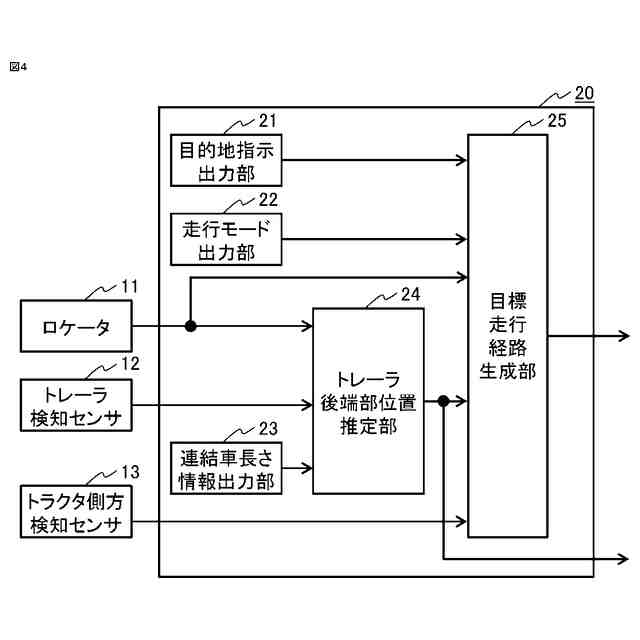
目的地の位置情報である目的地位置を出力する目的地指示出力部と、
前記走行モードを出力する走行モード出力部と、
前記トラクタの全長であるトラクタ長および前記トレーラの全長であるトレーラ長の情報を出力する連結車長さ情報出力部と、
前記トラクタ位置、前記トラクタ姿勢角、前記トラクタ-トレーラ相対角、前記トラクタ-トレーラ間距離、前記トラクタ長および前記トレーラ長の情報から、前記トレーラ後端中央位置を求めて出力するトレーラ後端部位置推定部と、
前記目的地位置、前記トラクタ周辺地図情報、前記走行モード、前記トレーラ後端中央位置、前記駐車スペース前方距離および前記目標駐車幅の情報から、前記目標走行経路を生成し、前記目標走行経路に対応した速度プロファイルを生成し、前記目標走行経路および前記速度プロファイルを出力する目標走行経路生成部とを備えることを特徴とする請求項1または2に記載のトレーラ走行経路出力装置。
【請求項4】
前記トラクタ周辺地図情報は、周回走行のための周回コースの上の点である複数の周回コース点の情報を含んでおり、
前記トレーラ走行経路生成器は、走行モードが前記トレーラを前記周回コースに沿って周回走行させるトラベリングモードのときに前記目標走行経路として通常目標走行経路を生成して出力し、
前記通常目標走行経路は、前記トレーラ後端中央点を基準に前記トレーラの前後方向にあらかじめ定められたデータ取得範囲に含まれる前記周回コース点の上を通過する経路であることを特徴とする請求項1または2に記載のトレーラ走行経路出力装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、トレーラ走行経路出力装置に関するものである。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
トラクタに牽引されたトレーラによる貨物輸送は、世界の商取引の重要な部分を占めている。本開示において、トレーラとは、貨物を積む貨物車両部分を指し、トラクタとは、トレーラを牽引する車両を指し、連結車は、トラクタとトレーラを備えている。昨今、家電もしくは食品などの商品、あるいはサービスを、インターネット上で売買するEコマース(Electric Commerce:電子商取引)に代表されるビジネスの需要が急拡大している。一方で、トレーラによる貨物輸送において、ドライバー不足あるいはドライバーの高齢化が問題になっている。ドライバー不足あるいはドライバーの時間外労働の削減の課題を解決するため、物流施設内のトラクタの自動運転が注目されている。ここでの自動運転は、操舵、駆動、制動およびシフトを自動で操作することを指している。
【0003】
自動運転車両を制御するためには、自動運転のモードを管理し、その自動運転モードに従い車両を制御する必要がある。自動運転モードには、例えば、ドライバーが運転操作を行うマニュアルモード、自動運転が開始される前の待機状態であるスタンバイモード、トレーラを物流施設内の周回コースに沿って周回走行させるトラベリングモード、目標駐車場所にトラクタに牽引されたトレーラを駐車させるパーキングモード、物流施設の荷物搬入口の扉(Loading Bay Door)にトレーラを接続するドッキングモード、トラクタとトレーラを結合するヒッチングモードなどがある。
【0004】
トレーラ走行経路出力装置として、パーキングモードにおいて、トレーラの後軸を基準として、あらかじめトレーラのホイールベースに応じた複数の後退経路プロファイルを保持し、駐車開始位置と、駐車目標位置と、トラクタおよびトレーラの周辺情報とから、トラクタの走行曲率が小さい経路を選択するものが提案されている(例えば、特許文献1参照)。この技術は、あらかじめ定めている後退経路プロファイルを使用するため、再現性が高く、演算負荷が低いことが特徴である。
【先行技術文献】
【特許文献】
【0005】
特開2023-44216号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に示されたトレーラ走行経路出力装置では、あらかじめ複数の後退経路プロファイルを保持し、複数の後退経路プロファイルの中から一つの後退経路が選択されるため、物流施設によっては、あるいは、繁忙期もしくは積雪時期などにおいては、トラクタとトレーラ周辺の通行可能な範囲が異なるため、それぞれの状況に対応した後退経路が存在しない場合があり、その場合は目標走行経路を生成できないという課題があった。
【0007】
本開示は、上述の課題を解決するための技術を開示するものであり、トラクタおよびトレーラの周辺の状況に対応した目標走行経路を出力するトレーラ走行経路出力装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本開示のトレーラ走行経路出力装置は、トラクタに連結されたトレーラを移動させるための目標走行経路を生成して出力するトレーラ走行経路出力装置であって、トラクタの位置情報であるトラクタ位置、トラクタの姿勢角であるトラクタ姿勢角、および、トラクタの周辺の地図の情報であるトラクタ周辺地図情報を出力するロケータと、トラクタおよびトレーラの間の相対角度であるトラクタ-トレーラ相対角、および、トラクタおよびトレーラの間の距離であるトラクタ-トレーラ間距離を出力するトレーラ検知センサと、目標駐車スペースの幅である目標駐車幅、および、目標駐車スペースの前方端から走行不可領域までの前方方向における距離である駐車スペース前方距離を出力するトラクタ側方検知センサと、ロケータ、トレーラ検知センサおよびトラクタ側方検知センサの出力から、トレーラの後端部の中央のトレーラ後端中央位置にあるトレーラ後端中央点の目標走行経路を生成して出力するトレーラ走行経路生成器とを備え、トレーラ走行経路生成器は、走行モードがトレーラを駐車させるパーキングモードのときに目標走行経路として駐車目標走行経路を生成して出力し、駐車目標走行経路は、駐車スペース前方距離があらかじめ定められた距離しきい値以上のときはトレーラが後退するときの経路が直線である第一目標経路であり、駐車スペース前方距離が距離しきい値よりも小さいときはトレーラが後退するときの経路がクロソイド曲線を含む第二目標経路であることを特徴とする。
【発明の効果】
【0009】
本開示のトレーラ走行経路出力装置は、トラクタに連結されたトレーラを移動させるための目標走行経路を生成して出力するトレーラ走行経路出力装置であって、トラクタの位置情報であるトラクタ位置、トラクタの姿勢角であるトラクタ姿勢角、および、トラクタの周辺の地図の情報であるトラクタ周辺地図情報を出力するロケータと、トラクタおよびトレーラの間の相対角度であるトラクタ-トレーラ相対角、および、トラクタおよびトレーラの間の距離であるトラクタ-トレーラ間距離を出力するトレーラ検知センサと、目標駐車スペースの幅である目標駐車幅、および、目標駐車スペースの前方端から走行不可領域までの前方方向における距離である駐車スペース前方距離を出力するトラクタ側方検知センサと、ロケータ、トレーラ検知センサおよびトラクタ側方検知センサの出力から、トレーラの後端部の中央のトレーラ後端中央位置にあるトレーラ後端中央点の目標走行経路を生成して出力するトレーラ走行経路生成器とを備え、トレーラ走行経路生成器は、走行モードがトレーラを駐車させるパーキングモードのときに目標走行経路として駐車目標走行経路を生成して出力し、駐車目標走行経路は、駐車スペース前方距離があらかじめ定められた距離しきい値以上のときはトレーラが後退するときの経路が直線である第一目標経路であり、駐車スペース前方距離が距離しきい値よりも小さいときはトレーラが後退するときの経路がクロソイド曲線を含む第二目標経路であるので、トラクタおよびトレーラの周辺の状況に対応した目標走行経路を出力することができる。
【図面の簡単な説明】
【0010】
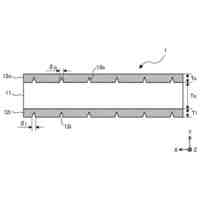
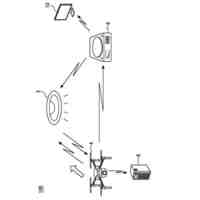
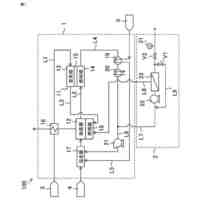
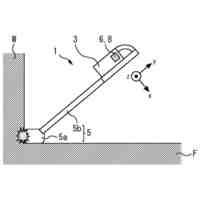
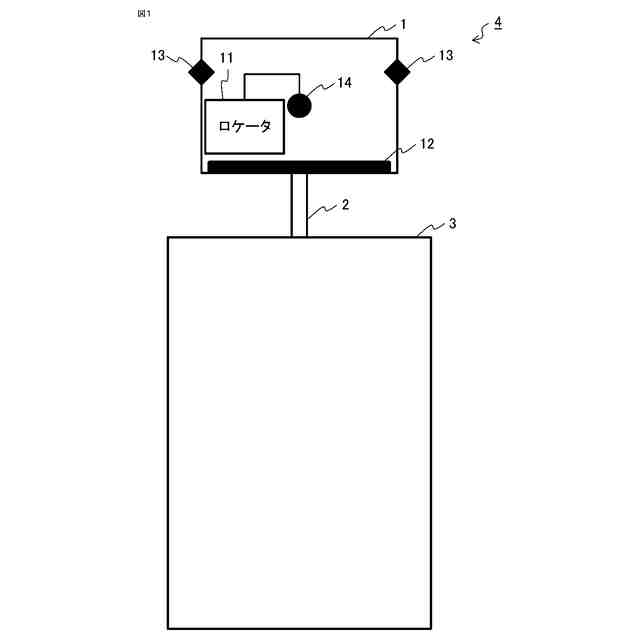
実施の形態1によるトレーラ走行経路出力装置を備えた連結車の概略図である。
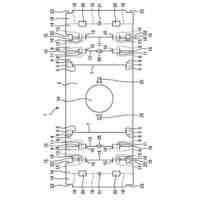
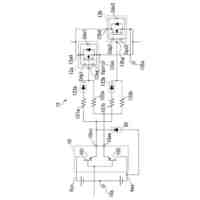
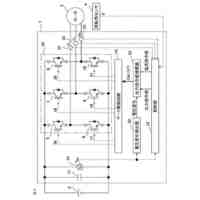
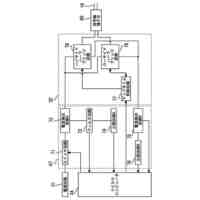
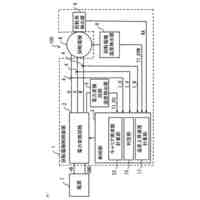
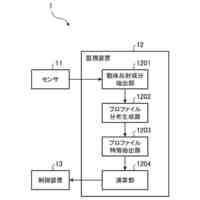
実施の形態1によるトレーラ走行経路出力装置の構成を示すブロック図である。
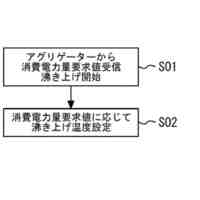
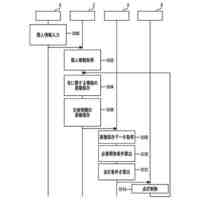
実施の形態1によるトレーラ走行経路出力装置の動作を説明するためのフローチャートである。
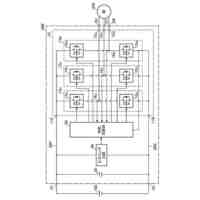
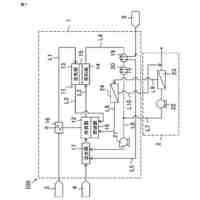
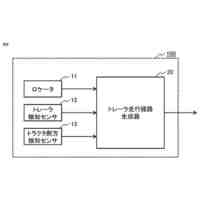
実施の形態1におけるトレーラ走行経路生成器の構成を示すブロック図である。
実施の形態1におけるトレーラ走行経路生成器の動作を説明するためのフローチャートである。
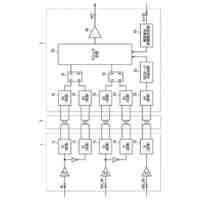
実施の形態1におけるトレーラ後端部位置推定部の構成を示すブロック図である。
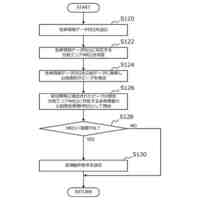
実施の形態1におけるトレーラ後端部位置推定部の動作を説明するためのフローチャートである。
実施の形態1におけるトレーラ後端部中央位置の例を説明するための図である。
実施の形態1におけるトレーラ後端部中央位置の別の例を説明するための図である。
実施の形態1における目標走行経路生成部の構成を示すブロック図である。
実施の形態1における走行モード判定部および目標走行経路切替部の動作を説明するためのフローチャートである。
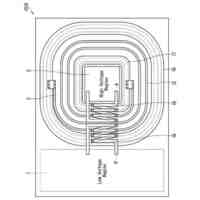
実施の形態1における通常目標走行経路の例を示す図である。
実施の形態1における駐車目標経路生成部の構成を示すブロック図である。
実施の形態1における駐車スペース前方距離判定部および駐車目標経路切替部の動作を説明するためのフローチャートである。
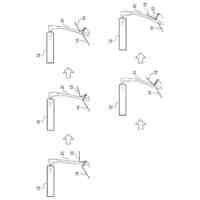
実施の形態1における第一目標経路の例を示す図である。
実施の形態1における第二目標経路の例を示す図である。
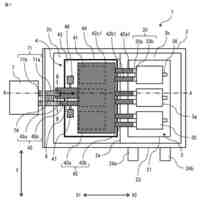
実施の形態1におけるトレーラ走行経路生成器のハードウェア構成の一例を示す模式図である。
実施の形態1におけるトレーラ走行経路生成器のハードウェア構成の別の一例を示す模式図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
吸音体
26日前
三菱電機株式会社
冷蔵庫
12日前
三菱電機株式会社
梱包装置
9日前
三菱電機株式会社
送風装置
24日前
三菱電機株式会社
照明装置
17日前
三菱電機株式会社
電子機器
13日前
三菱電機株式会社
照明装置
13日前
三菱電機株式会社
半導体装置
16日前
三菱電機株式会社
半導体装置
5日前
三菱電機株式会社
電力変換装置
20日前
三菱電機株式会社
照明システム
17日前
三菱電機株式会社
電力変換装置
16日前
三菱電機株式会社
貯湯式給湯機
16日前
三菱電機株式会社
電力変換装置
10日前
三菱電機株式会社
給湯システム
10日前
三菱電機株式会社
制御システム
12日前
三菱電機株式会社
電力変換装置
4日前
三菱電機株式会社
電磁ピンセット
12日前
三菱電機株式会社
無線通信システム
5日前
三菱電機株式会社
燃料電池システム
3日前
三菱電機株式会社
回転電機制御装置
19日前
三菱電機株式会社
照明制御システム
4日前
三菱電機株式会社
燃料電池システム
5日前
三菱電機株式会社
半導体素子駆動装置
25日前
三菱電機株式会社
回転電機及び固定子
5日前
三菱電機株式会社
監視装置および監視方法
23日前
三菱電機株式会社
掃除機および掃除システム
20日前
三菱電機株式会社
トレーラ走行経路出力装置
5日前
三菱電機株式会社
半導体装置及びその製造方法
12日前
三菱電機株式会社
炊飯システムおよび炊飯方法
5日前
三菱電機株式会社
通風装置および換気システム
12日前
三菱電機株式会社
検出システムおよび検出方法
13日前
三菱電機株式会社
設備プレート及び照明システム
18日前
三菱電機株式会社
見守りシステムおよび見守り方法
6日前
三菱電機株式会社
空気調和システム及び情報処理装置
12日前
三菱電機株式会社
電力用半導体装置及びその製造方法
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ