TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025084358
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023198202
出願日
2023-11-22
発明の名称
吸着パッド、及びワーク搬送装置
出願人
株式会社スター精機
代理人
個人
,
個人
主分類
B25J
15/06 20060101AFI20250527BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】エア又は負圧の供給を必要としない吸着パッド、及びワーク搬送装置を提供すること。
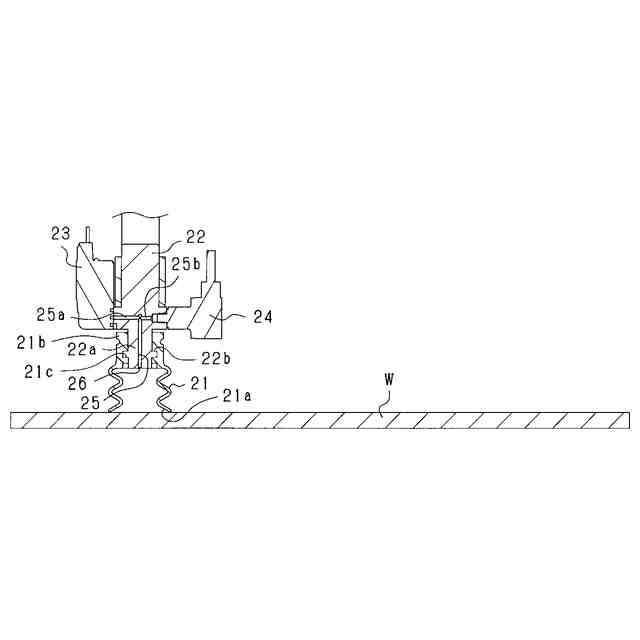
【解決手段】吸着パッド20は、両端が開放される蛇腹形状に形成され、両端のうち第1端21aがワークWに押し当てられることにより弾性変形するパッド部21と、パッド部21の両端のうち第2端21bが塞がれるように、パッド部21が取り付けられる本体部22と、本体部22の内部に設けられたエア通路25,25aであってパッド部21の内部と連通するエア通路25,25aに接続されるように、本体部22に取り付けられる電磁弁23と、を備える。電磁弁23は、閉状態となったとき、エア通路25,25aを介してパッド部21の内部と外部との間におけるエアの通過を遮断し、開状態となったとき、エア通路25,25aを介してパッド部21の内部と外部との間におけるエアの通過を許可するものである。
【選択図】 図4
特許請求の範囲
【請求項1】
ワークを吸着した状態で前記ワークを搬送するワーク搬送装置に用いられる吸着パッドであって、
両端が開放される筒状に形成され、両端のうち第1端側が前記ワークに押し当てられることにより弾性変形するパッド部と、
前記パッド部の両端のうち第2端側が塞がれるように、前記パッド部が取り付けられる本体部と、
前記本体部の内部に設けられたエア通路であって前記パッド部の内部と連通する前記エア通路に接続されるように、前記本体部に取り付けられる電磁弁と、を備え、
前記電磁弁は、閉状態となったとき、前記エア通路を介して前記パッド部の内部と外部との間におけるエアの通過を遮断し、開状態となったとき、前記エア通路を介して前記パッド部の内部と外部との間におけるエアの通過を許可するものである、吸着パッド。
続きを表示(約 1,300 文字)
【請求項2】
前記パッド部は、前記電磁弁が開状態であるときに前記ワークに押し当てられることにより弾性変形して前記電磁弁を介して前記パッド部の内部のエアを外部に流出させ、その後、前記電磁弁が閉状態とされ、そのまま、前記ワークから遠ざけられると、前記パッド部の内部が負圧になって前記ワークを吸着するものである、請求項1に記載の吸着パッド。
【請求項3】
前記パッド部は、前記ワークを吸着している状態で、前記電磁弁が開状態とされると、前記パッド部の外部から前記エア通路を介してエアが流入して、元の形状に復帰し、負圧が解消されて前記ワークが離間するものである、請求項1に記載の吸着パッド。
【請求項4】
前記電磁弁は、非通電時に閉状態となり、通電時に開状態となる、ノーマルクローズの電磁弁である、請求項1~3のうちいずれか1項に記載の吸着パッド。
【請求項5】
前記エア通路は、途中で分岐しており、分岐通路は、空気圧を測定する空気圧センサに接続されている、請求項1~3のうちいずれか1項に記載の吸着パッド。
【請求項6】
前記エア通路は、前記パッド部の内部から前記電磁弁に至るまで同じ径とされている、請求項1~3のうちいずれか1項に記載の吸着パッド。
【請求項7】
ワークを吸着した状態で前記ワークを搬送するワーク搬送装置において、
前記ワークを吸着する吸着パッドと、
前記吸着パッドを移動させる搬送機構と、
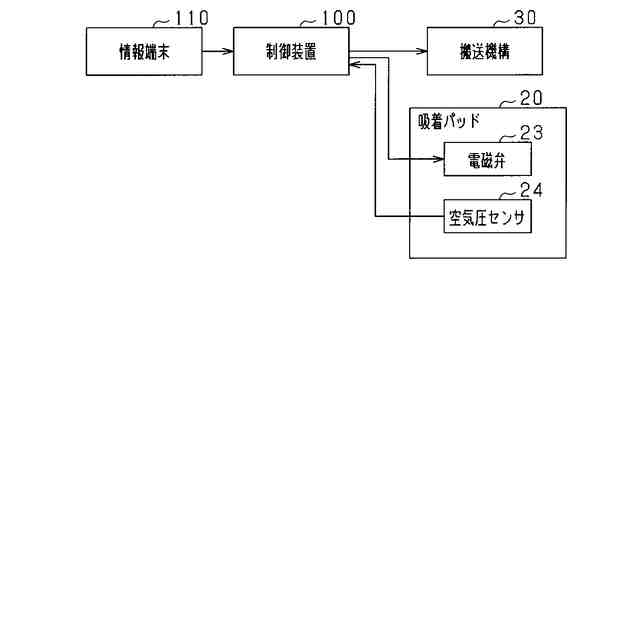
前記吸着パッドによるワークの吸着、及び前記搬送機構による前記吸着パッドの移動を制御する制御装置と、を備え、
前記吸着パッドは、
両端が開放される筒状に形成され、両端のうち第1端側が前記ワークに押し当てられことにより弾性変形するパッド部と、
前記パッド部の両端のうち第2端側が塞がれるように、前記パッド部が取り付けられる本体部と、
前記本体部の内部に設けられたエア通路であって前記パッド部の内部と連通する前記エア通路に接続されるように、前記本体部に取り付けられる電磁弁と、を備え、
前記電磁弁は、閉状態となったとき、前記エア通路を介して前記パッド部の内部と外部との間におけるエアの通過を遮断し、開状態となったとき、前記エア通路を介して前記パッド部の内部と外部との間におけるエアの通過を許可するものであり、
前記電磁弁は、非通電時に閉状態となり、通電時に開状態となる、ノーマルクローズの電磁弁であり、
前記制御装置は、
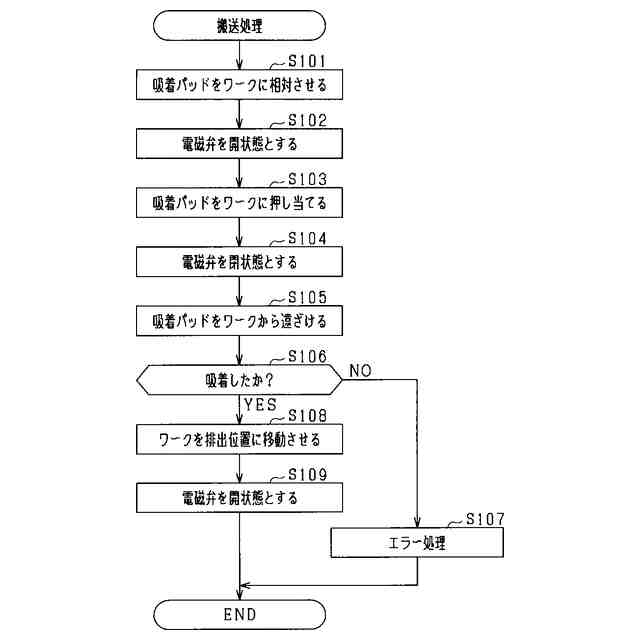
前記搬送機構によって前記吸着パッドを移動させて前記パッド部を前記ワークに押し当てる際、開状態となるように前記電磁弁に対して通電制御し、
前記パッド部を前記ワークに押し当てた後、閉状態となるように前記電磁弁への通電を遮断し、その状態で前記吸着パッドを移動させることにより、前記ワークを前記吸着パッドに吸着させる、ワーク搬送装置。
【請求項8】
前記制御装置は、前記ワークを前記吸着パッドに吸着させた状態において、前記パッド部から前記ワークを離間させる際、開状態となるように前記電磁弁に対して通電制御する、請求項7に記載のワーク搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワーク搬送装置に利用する吸着パッド、及びワーク搬送装置に関するものである。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来から、ワーク搬送装置を利用することによって、ワーク搬送の自動化が実施されている。このようなワーク搬送作業の自動化に用いるロボットハンドとしては、例えば特許文献1や特許文献2に記載されている吸着パッドが知られている。
【0003】
これらの特許文献に記載のワーク搬送装置は、吸着パッドをワークに接触させたのちに、エア配管を介して負圧を供給することにより、ワークを吸着パッドで吸着して吊り上げ、その吊り上げた状態で運ぶようにしている。
【先行技術文献】
【特許文献】
【0004】
特開2019-195888号公報
特開2018-161722号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、負圧を利用してワークを吸着させる場合、真空ポンプやエジェクタなど、真空を発生させるための装置や設備を備える必要があり、また、エア配管の取り回しにも注意が必要とされるという問題があった。
【0006】
本発明は、上記課題に鑑みてなされたものであり、その目的は、エア又は負圧の供給を必要としない吸着パッド、及びワーク搬送装置を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するための第1の手段は、ワークを吸着した状態で前記ワークを搬送するワーク搬送装置に用いられる吸着パッドであって、両端が開放される筒状に形成され、両端のうち第1端側が前記ワークに押し当てられることにより弾性変形するパッド部と、前記パッド部の両端のうち第2端側が塞がれるように、前記パッド部が取り付けられる本体部と、前記本体部の内部に設けられたエア通路であって前記パッド部の内部と連通する前記エア通路に接続されるように、前記本体部に取り付けられる電磁弁と、を備え、前記電磁弁は、閉状態となったとき、前記エア通路を介して前記パッド部の内部と外部との間におけるエアの通過を遮断し、開状態となったとき、前記エア通路を介して前記パッド部の内部と外部との間におけるエアの通過を許可するものである。
【0008】
上記構成により、電磁弁でパッド部の内部と外部との間におけるエアの通過及び遮断を切り替えることができる。これにより、圧縮エア又は負圧を供給しなくても、電磁弁を制御することにより、パッド部の内部の空気圧を制御して、ワークの吸着及び吸着の解除を制御することが可能となる。
【0009】
上記課題を解決するための第2の手段は、ワークを吸着した状態で前記ワークを搬送するワーク搬送装置において、前記ワークを吸着する吸着パッドと、前記吸着パッドを移動させる搬送機構と、前記吸着パッドによるワークの吸着、及び前記搬送機構による前記吸着パッドの移動を制御する制御装置と、を備え、前記吸着パッドは、両端が開放される筒状に形成され、両端のうち第1端側が前記ワークに押し当てられことにより弾性変形するパッド部と、前記パッド部の両端のうち第2端側が塞がれるように、前記パッド部が取り付けられる本体部と、前記本体部の内部に設けられたエア通路であって前記パッド部の内部と連通する前記エア通路に接続されるように、前記本体部に取り付けられる電磁弁と、を備え、前記電磁弁は、閉状態となったとき、前記エア通路を介して前記パッド部の内部と外部との間におけるエアの通過を遮断し、開状態となったとき、前記エア通路を介して前記パッド部の内部と外部との間におけるエアの通過を許可するものであり、前記電磁弁は、非通電時に閉状態となり、通電時に開状態となる、ノーマルクローズの電磁弁であり、前記制御装置は、前記搬送機構によって前記吸着パッドを移動させて前記パッド部を前記ワークに押し当てる際、開状態となるように前記電磁弁に対して通電制御し、前記パッド部を前記ワークに押し当てた後、閉状態となるように前記電磁弁への通電を遮断し、その状態で前記吸着パッドを移動させることにより、前記ワークを前記吸着パッドに吸着させる。
【0010】
上記構成により、制御装置は、電磁弁でパッド部の内部と外部との間におけるエアの通過及び遮断を切り替えることができ、また、搬送機構により吸着パッドを移動させて、ワークに押し当てること及び遠ざけることが可能となる。これにより、圧縮エア又は負圧を供給しなくても、電磁弁及び搬送機構を制御することにより、制御装置は、パッド部の内部の空気圧を制御して、ワークの吸着及び吸着の解除を制御することが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
日東精工株式会社
電動ドライバ
4日前
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
関節機構
9日前
株式会社ダイヘン
移動体
7日前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
18日前
工機ホールディングス株式会社
作業機
1か月前
学校法人五島育英会
アーム機構
9日前
株式会社スター精機
吸着パッド
3日前
株式会社スター精機
吸着パッド
3日前
株式会社アイエイアイ
グリッパー
24日前
川崎重工業株式会社
制動システム
1か月前
株式会社PILLAR
チューブ保持治具
14日前
住友重機械工業株式会社
ロボット
29日前
株式会社イノウ
給油口キャップ用開閉具
1か月前
庄内機械株式会社
釘打装置
22日前
株式会社スター精機
産業用ロボット
1日前
オークラ輸送機株式会社
ハンド装置
17日前
株式会社不二越
垂直多関節ロボット
1か月前
トヨタ自動車東日本株式会社
搬送治具
22日前
株式会社マキタ
電動作業機
10日前
株式会社マキタ
電動作業機
10日前
芝浦機械株式会社
双腕ロボット
28日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
株式会社リコー
多関節ロボット
8日前
株式会社安川電機
ロボット
1日前
株式会社安川電機
ロボット
1日前
株式会社安川電機
ロボット
1日前
株式会社ダイヘン
ロボット制御システム
7日前
トヨタ自動車株式会社
荷姿影響緩和方法
25日前
セイコーエプソン株式会社
ロボット
3日前
小倉クラッチ株式会社
ロボット用ツール交換装置
3日前
パナソニック株式会社
工具
1か月前
パナソニック株式会社
工具
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ