TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025080108
公報種別
公開特許公報(A)
公開日
2025-05-23
出願番号
2023193133
出願日
2023-11-13
発明の名称
非接触形状測定機及び位置調整方法
出願人
株式会社東京精密
代理人
個人
,
個人
,
個人
,
個人
主分類
G01B
11/25 20060101AFI20250516BHJP(測定;試験)
要約
【課題】センサヘッド及び測定面の一方に対して他方を低コスト且つ高精度に接近させることができる非接触形状測定機、及び位置調整方法を提供する。
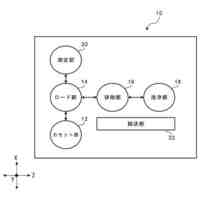
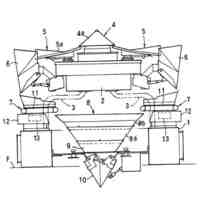
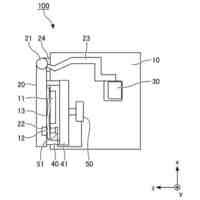
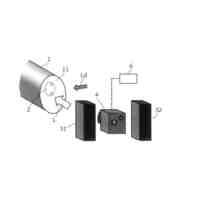
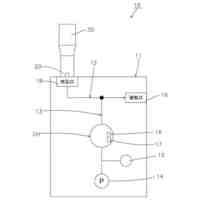
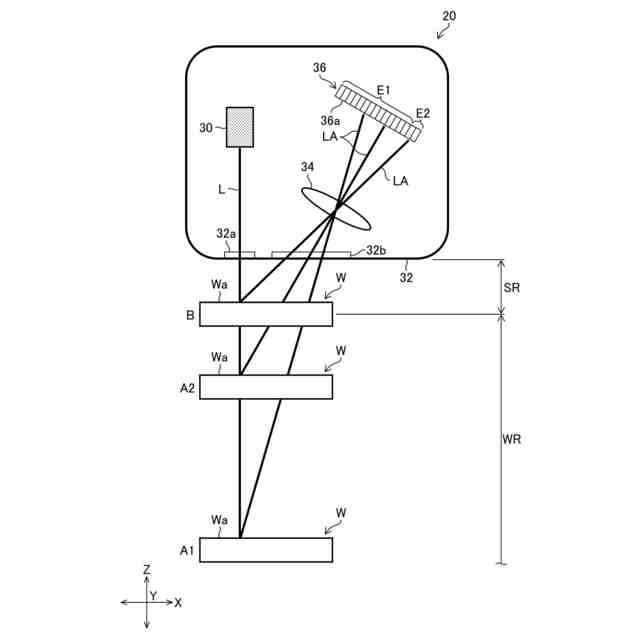
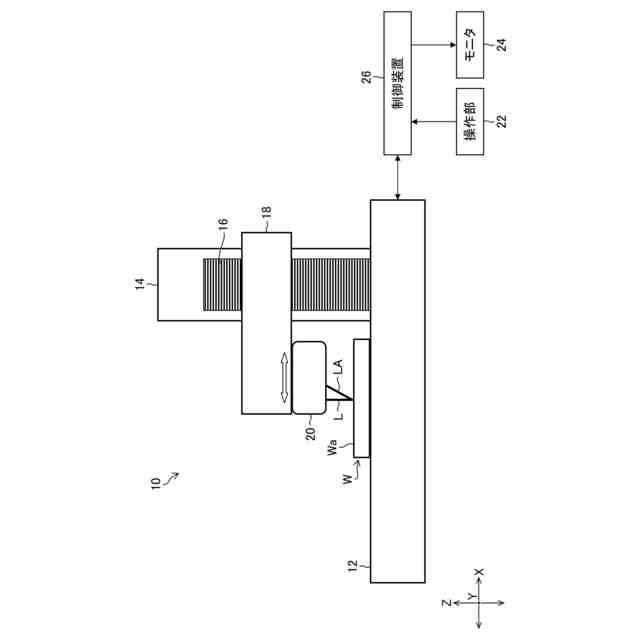
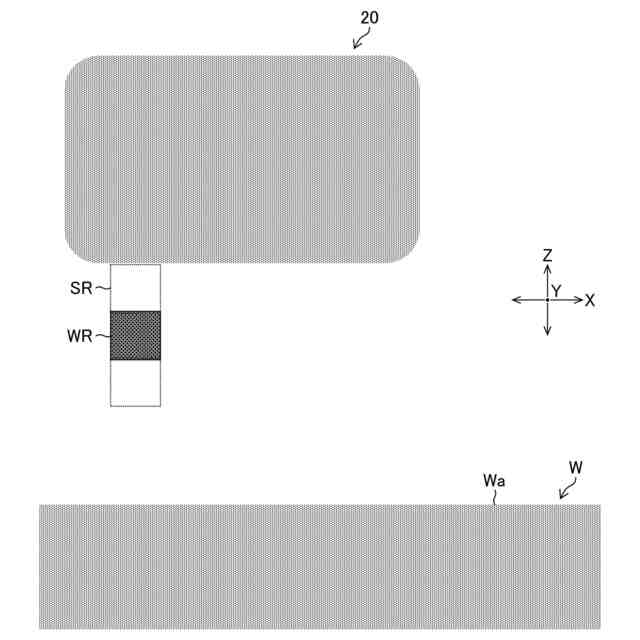
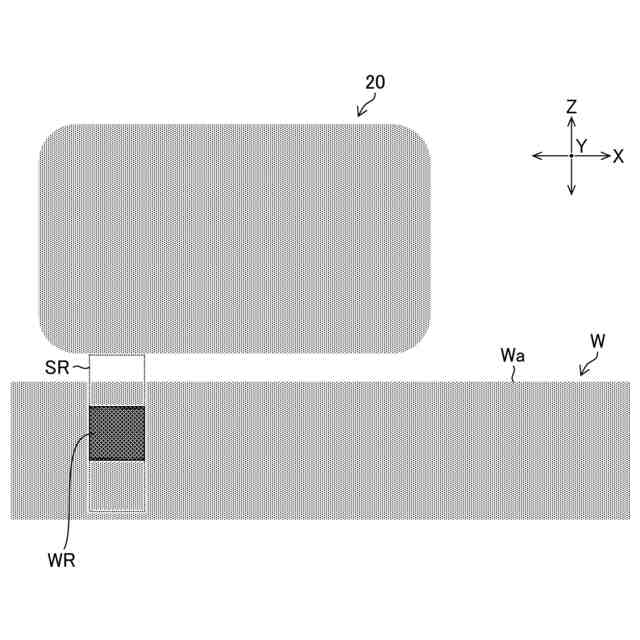
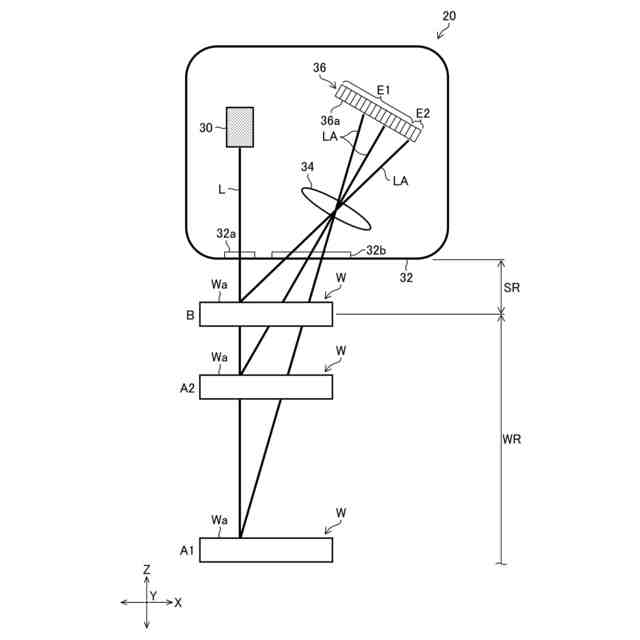
【解決手段】センサヘッド20と、センサヘッド20と測定面Waとの間の距離に応じて受光面36aへの反射光LAの入射位置が変化する受光センサ36と、受光面Waに対する反射光LAの入射位置に基づいて距離を測定する距離測定部44と、センサヘッド20及び測定面Waの一方に対して他方を移動軸(C軸14)に沿って接近及び離間させる移動機構(C軸移動機構16)と、を備え、センサヘッド20から測定光Lの出射方向に離間した位置に測定範囲WRが予め定められており、受光面Waは、移動機構により他方を近接範囲SR内に測定面Waが含まれる位置まで一方に接近させた場合でも反射光LAを受光可能な大きさを有する。
【選択図】図6
特許請求の範囲
【請求項1】
測定面に向けて測定光を出射して、前記測定面にて反射された前記測定光の反射光が入射するセンサヘッドと、
前記センサヘッドに入射した前記反射光を受光する受光面を有する受光センサであって、且つ前記センサヘッドと前記測定面との間の距離に応じて前記受光面への前記反射光の入射位置が変化する受光センサと、
前記受光面に対する前記反射光の入射位置に基づいて、前記距離を測定する距離測定部と、
前記センサヘッド及び前記測定面の一方に対して他方を予め定められた移動軸に沿って接近及び離間させる移動機構と、
を備え、
前記センサヘッドから前記測定光の出射方向に離間した位置に、前記出射方向において前記距離の測定を実行する測定範囲が予め定められており、
前記センサヘッドと前記測定範囲との間の範囲を近接範囲とした場合に、前記受光面は、前記移動機構により前記他方を前記近接範囲内に前記測定面が含まれる位置まで前記一方に接近させた場合でも前記反射光を受光可能な大きさを有する非接触形状測定機。
続きを表示(約 1,400 文字)
【請求項2】
前記センサヘッドには、前記測定面において前記測定光の入射方向とは異なる方向に反射された前記反射光が入射する請求項1に記載の非接触形状測定機。
【請求項3】
前記センサヘッドから出射する前記測定光と、前記センサヘッドに入射する前記反射光が同軸である請求項1に記載の非接触形状測定機。
【請求項4】
前記移動機構を駆動して前記一方に対して前記他方を接近させる位置調整部と、
前記一方に対する前記他方の接近中に前記測定面が前記測定範囲に達してから、前記測定範囲に前記測定面が含まれる範囲内で前記他方を前記一方に最も接近させるために必要な前記他方の移動量を演算する移動量演算部と、
を備え、
前記位置調整部は、前記受光センサによる前記反射光の受光結果に基づいて前記一方に対する前記他方の接近中に前記測定範囲に前記測定面が達してから、前記移動機構を駆動して前記他方を前記移動量だけ前記一方に接近させる請求項1から3のいずれか1項に記載の非接触形状測定機。
【請求項5】
前記位置調整部は、前記測定面が前記測定範囲内に達した後で前記反射光が前記受光センサで受光できなくなった場合には、前記移動機構の駆動を停止する請求項4に記載の非接触形状測定機。
【請求項6】
前記受光面に対する前記反射光の入射位置に応じて前記受光センサから出力される前記反射光の受光信号の電圧値が異なり、
前記受光センサから出力される前記受光信号の電圧値に基づいて、前記測定面が前記近接範囲内に含まれる位置まで前記他方が前記一方に接近したか否かを判定する接近判定部を備える請求項1から3のいずれか1項に記載の非接触形状測定機。
【請求項7】
前記移動軸が上下方向に平行である請求項1から3のいずれか1項に記載の非接触形状測定機。
【請求項8】
請求項1から3のいずれか1項に記載の非接触形状測定機において前記移動軸に沿った前記他方の位置を調整する位置調整方法であって、
前記移動機構により前記他方を前記一方に接近させる第1接近ステップと、
前記第1接近ステップの実行中に前記受光センサによる前記反射光の受光結果に基づいて、前記測定面が前記測定範囲内に含まれる位置で前記第1接近ステップを停止する第1停止ステップと、
前記第1停止ステップの後、前記移動機構により前記他方を前記一方にさらに接近させる第2接近ステップと、
前記第2接近ステップの実行中に前記受光センサによる前記反射光の受光結果に基づいて、前記近接範囲内に前記測定面が含まれる位置まで前記他方が前記一方に接近した場合には、前記一方に対する前記他方の接近を示す接近信号を出力する信号出力ステップと、
前記信号出力ステップが実行された場合に、前記移動機構により前記他方を前記一方から離間させる離間ステップと、
前記離間ステップの実行中に前記受光センサによる前記反射光の受光結果に基づいて、前記測定面が前記測定範囲内に達した場合に前記離間ステップを停止する第2停止ステップと、
を有する位置調整方法。
【請求項9】
前記第1接近ステップでは、前記第2接近ステップ及び前記離間ステップよりも高速で前記他方を移動させる請求項8に記載の位置調整方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、測定面の形状を非接触で測定する非接触形状測定機、及びこの非接触形状測定機で用いられる位置調整方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
ワーク(被測定物)の測定面の輪郭形状及び表面粗さ等の形状測定を実行する表面形状測定機が知られている。このような表面形状測定機では、接触子を測定面に接触させた状態で接触子とワークとを水平方向に相対移動させることで、接触子で測定面をトレースしながら接触子の揺動による変位をセンサヘッドにより検出して、このセンサヘッドから出力される変位検出信号に基づいて測定面の表面形状を測定する(特許文献1参照)。
【0003】
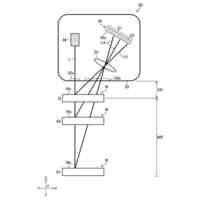
近年、表面形状測定機として、接触子を測定面に接触させる代わりに、非接触で測定面までの距離を測距可能なセンサヘッドと、ワークとを水平方向に相対移動させることで、測定面の形状測定を実行する非接触形状測定機がよく知られている(特許文献2参照)。非接触測定用のセンサヘッドは、例えば三角測量法を用いて測定面までの距離を測定する。具体的には、センサヘッドから測定面に向けて測定光を出射して、この測定面で反射された反射光をセンサヘッドの受光センサで受光する。この際に、センサヘッドと測定面との間の距離に応じて受光センサの受光面への反射光の入射位置が変化するので、受光面への反射光の入射位置に基づいてセンサヘッドと測定面との間の距離を測定可能である。
【先行技術文献】
【特許文献】
【0004】
特開2017-161548号公報
特開2011-196763号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
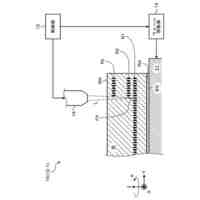
図20は、非接触形状測定機でワークWの測定面Waの非接触測定を実行する前のセンサヘッド100のZ方向の高さ位置調整を説明するための説明図である。なお、図中の互いに直交するXYZ方向のうちでXY方向は水平方向に平行な方向であり且つZ方向は水平方向に対して垂直な上下方向である。また、X方向がセンサヘッド100の移動方向(走査方向)であり、Z方向下方側からセンサヘッド100から出射される測定光Lの出射方向である。
【0006】
図20に示すように、センサヘッド100をX方向に移動させた場合に測定面Waの形状を測定可能な測定範囲WRは、Y方向から見た場合においてセンサヘッド100からそのZ方向下方側に離間している。このため、図20の符号XXAに示すように、凹部102を含む測定面Waの形状測定を行う場合において、測定範囲WRのZ方向中央位置に測定面Waが位置するようにセンサヘッド100のZ方向の位置調整を実行すると、凹部102の最下点が測定範囲WRに含まれなくなる。
【0007】
そこで、図20の符号XXBに示すように、凹部102の最下点が測定範囲WRに含まれるように、センサヘッド100を測定面Wa側に向けて押し付けて、このセンサヘッド100を測定面Waに可能な限り接近させるセンサヘッド100のZ方向位置調整が実行される。
【0008】
このようなセンサヘッド100のZ方向位置調整を実行する場合には、センサヘッド1
00の測定面Waへの衝突・接触回避することで、センサヘッド100及びワークWのダメージ発生を防止することが求められている。このため、センサヘッド100の下面に圧電センサを設けて、この圧電センサが出力される信号に基づいて測定面Waが接触するまでセンサヘッド100をZ方向下方側に下降させる方法が知られている。また、センサヘッド100の下面に圧電センサを設ける代わりに、測定面Waまでの距離を測定する測距センサをセンサヘッド100に別途に設けて、この測距センサの測定結果に基づいて、センサヘッド100を測定面Waに可能な限り接近させる方法も知られている。
【0009】
しかしながら、センサヘッド100の下面に圧電センサを設ける方法では、圧電センサの厚みより短い距離(作動距離)でセンサヘッド100を測定面Waに接近させることはできない。また、圧電センサから延びる配線の取り回しに手間がかかるという問題もある。さらに、そもそも圧電センサを測定面Waに結局接触してしまうため、センサヘッド100及び測定面Wa(ワークW)のダメージをゼロにすることができない。さらに、圧電センサは有限な大きさがあるため実質的に作動距離が減ってしまう。さらにまた、圧電センサの配線が振動を拾いやすく、測定のノイズとなることがあった。
【0010】
また、センサヘッド100に測距センサを別途設ける方法では、測距センサとして低価格のセンサ(例えば超音波センサ)を用いると、測距センサの測定精度が低くなるので、センサヘッド100を可能な限り測定面Waに接近させることはできない。また逆に測距センサとして高精度のセンサを用いた場合には、製造コストが増加してしまう。さらに、センサヘッド100の測定軸と測距センサの測定軸とが異なるので、測定面Waが凹凸形状である場合に、凹部102の最下点が測定範囲WRに含まれるようにセンサヘッド100のZ方向位置調整を実行することが困難である。さらにまた、測距センサの測定軸がセンサヘッド100の測定軸とは別になってしまうため、ワークWが小さい場合などに対応できない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東京精密
ワーク加工装置
1か月前
株式会社東京精密
ワーク加工装置
1か月前
株式会社東京精密
ウェーハ加工システム
6日前
株式会社東京精密
形状測定装置及び形状測定方法
6日前
株式会社東京精密
形状測定装置及び形状測定方法
6日前
株式会社東京精密
非接触測定機及びゲイン調整方法
10日前
株式会社東京精密
測定装置及び測定装置の測定方法
1か月前
株式会社東京精密
非接触形状測定機及び位置調整方法
1か月前
株式会社東京精密
表面形状測定装置及び表面形状測定方法
20日前
株式会社東京精密
ウェーハ加工システム及びウェーハ加工方法
6日前
株式会社東京精密
加工装置、チャック形状補正方法、及び加工方法
1か月前
株式会社東京精密
加工システム
12日前
株式会社東京精密
レーザ加工装置
17日前
株式会社東京精密
テープ接合装置及び方法
12日前
株式会社東京精密
プローバ及び位置合わせ方法
10日前
株式会社東京精密
温度付与装置及び温度付与方法
3日前
日本精機株式会社
表示装置
20日前
有限会社原製作所
検出回路
18日前
大和製衡株式会社
組合せ秤
4日前
日本無線株式会社
レーダ装置
19日前
株式会社リコー
光学機器
18日前
個人
フロートレス液面センサー
11日前
日本特殊陶業株式会社
ガスセンサ
10日前
ダイハツ工業株式会社
試験用治具
4日前
キヤノン株式会社
放射線撮像装置
13日前
大和製衡株式会社
組合せ計量装置
20日前
日本精機株式会社
二酸化炭素濃度測定器
25日前
株式会社クボタ
作業車
3日前
大同特殊鋼株式会社
座標系較正方法
13日前
大同特殊鋼株式会社
ラベル色特定方法
13日前
株式会社フジキン
流量測定装置
5日前
旭光電機株式会社
漏出検出装置
10日前
キヤノン株式会社
光学装置
24日前
株式会社アステックス
ラック型負荷装置
11日前
NISSHA株式会社
ガス検出器
23日前
住友化学株式会社
積層基板
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ