TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025080109
公報種別
公開特許公報(A)
公開日
2025-05-23
出願番号
2023193134
出願日
2023-11-13
発明の名称
測定装置及び測定装置の測定方法
出願人
株式会社東京精密
代理人
個人
,
個人
,
個人
,
個人
主分類
B23Q
17/00 20060101AFI20250516BHJP(工作機械;他に分類されない金属加工)
要約
【課題】従来よりも適切な条件で測長器による測定値の取得を実行可能な測定装置及び測定装置の測定方法を提供する。
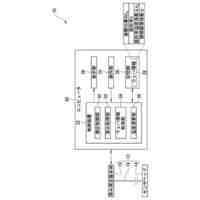
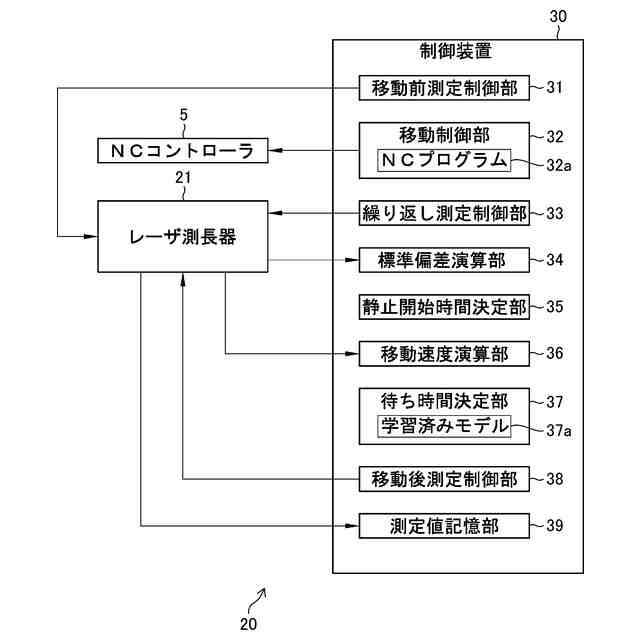
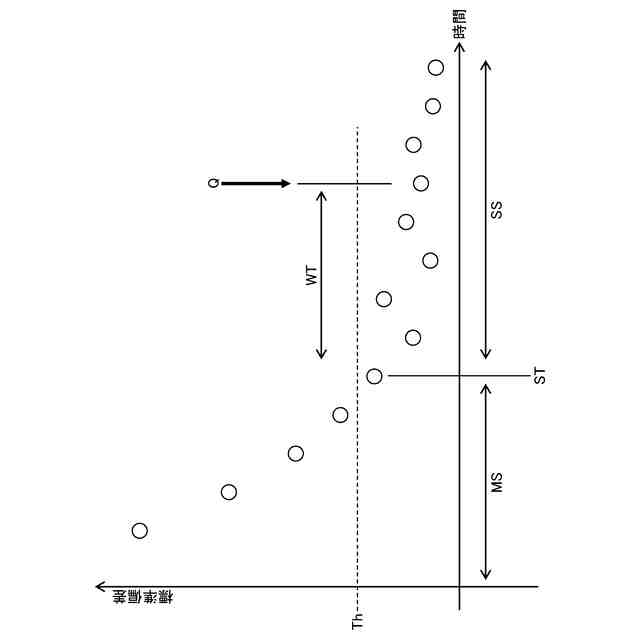
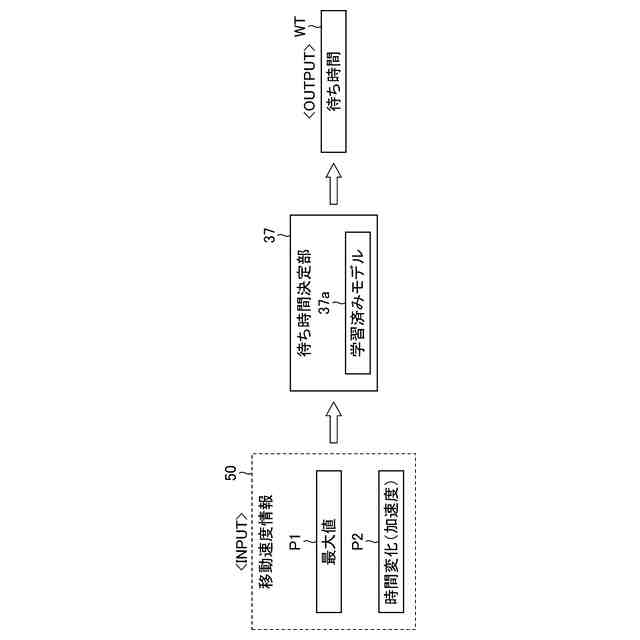
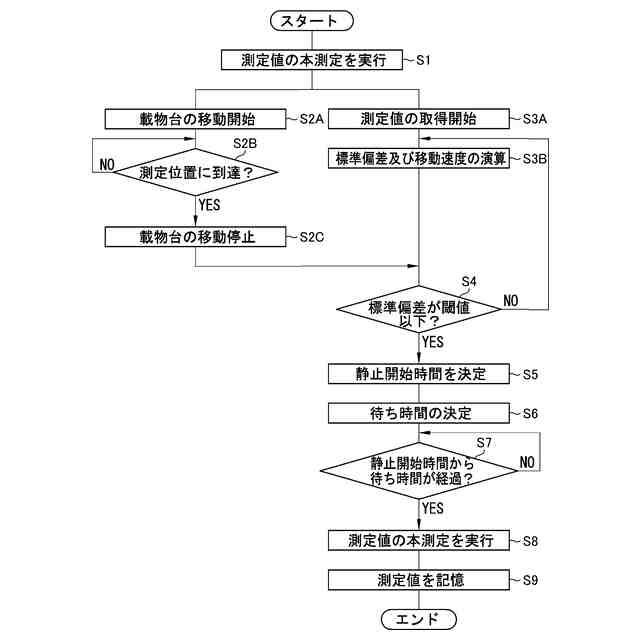
【解決手段】測長器(レーザ測長器21)及び測定対象(コーナキューブ18)のいずれか一方の測定点への移動開始後、測長器による測定値の取得を繰り返し実行させる第1測定制御部(繰り返し測定制御部33)と、測定値のばらつきを表す指標の演算を繰り返す指標演算部(標準偏差演算部34)と、指標が閾値以下となった時間を静止開始時間STとして決定する静止開始時間決定部35と、一方の移動速度の演算を繰り返す移動速度演算部36と、一方の移動速度情報50に基づいて静止開始時間STからの待ち時間WTを決定する待ち時間決定部37と、静止開始時間STから待ち時間WTが経過した場合に本測定を実行する第2測定制御部(移動後測定制御部38)と、を備える。
【選択図】図6
特許請求の範囲
【請求項1】
測定対象までの距離の測定値を取得する測長器を備え、前記測長器及び前記測定対象のいずれか一方が予め定められた測定点まで移動された場合に前記測長器による前記測定値の取得を実行する測定装置において、
前記一方の前記測定点への移動が開始されてから、前記測長器による前記測定値の取得を繰り返し実行させる第1測定制御部と、
前記測長器により繰り返し取得される前記測定値に基づいて、前記測定値のばらつきを表す指標の演算を繰り返し実行する指標演算部と、
前記指標演算部が演算した前記指標が予め定められた閾値以下となった時間を前記一方が前記測定点で静止した静止開始時間として決定する静止開始時間決定部と、
前記測長器により繰り返し取得される前記測定値と前記測定値の取得間隔とに基づいて、前記一方の移動速度の演算を繰り返し実行する移動速度演算部と、
前記移動速度演算部の演算結果から得られる前記一方の移動速度情報に基づいて、前記静止開始時間決定部が決定した前記静止開始時間から前記測長器が前記測定点で前記測定値の本測定を開始するまでの待ち時間を決定する待ち時間決定部と、
前記静止開始時間決定部が決定した前記静止開始時間から前記待ち時間決定部が決定した前記待ち時間が経過した場合に、前記測長器による前記本測定を実行する第2測定制御部と、
を備える測定装置。
続きを表示(約 1,000 文字)
【請求項2】
前記移動速度情報が、前記移動速度の最大値及び前記移動速度の減速中の前記移動速度の時間変化の少なくともいずれか一方を含む請求項1に記載の測定装置。
【請求項3】
前記指標演算部が、予め定められた一定時間間隔ごとに、前記一定時間間隔内で前記測長器が取得した複数の前記測定値に基づいた前記指標の演算を実行する請求項1又は2に記載の測定装置。
【請求項4】
前記指標演算部が、前記指標として前記測定値の標準偏差を演算する請求項3に記載の測定装置。
【請求項5】
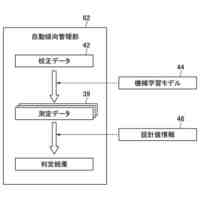
前記待ち時間決定部が、前記移動速度情報を入力として前記待ち時間を出力する学習済みモデルを用いて、前記待ち時間を決定する請求項1又は2に記載の測定装置。
【請求項6】
前記一方を移動させる移動機構を駆動して、前記一方を測定点まで移動させる移動制御部を備える請求項1又は2に記載の測定装置。
【請求項7】
測定対象までの距離の測定値を取得する測長器を備え、前記測長器及び前記測定対象のいずれか一方が予め定められた測定点まで移動された場合に前記測長器による前記測定値の取得を実行する測定装置の測定方法において、
前記一方の前記測定点への移動が開始されてから、前記測長器による前記測定値の取得を繰り返し実行させる第1測定制御ステップと、
前記測長器により繰り返し取得される前記測定値のばらつきを表す指標の演算を繰り返し実行する指標演算ステップと、
前記指標演算ステップで演算した前記指標が予め定められた閾値以下となった時間を前記一方が前記測定点で静止した静止開始時間として決定する静止開始時間決定ステップと、
前記測長器により繰り返し取得される前記測定値と前記測定値の取得間隔とに基づいて、前記一方の移動速度の演算を繰り返し実行する移動速度演算ステップと、
前記移動速度演算ステップの演算結果から得られる前記一方の移動速度情報に基づいて
、前記静止開始時間決定ステップで決定した前記静止開始時間から前記測長器が前記測定点で前記測定値の本測定を開始するまでの待ち時間を決定する待ち時間決定ステップと、
前記静止開始時間決定ステップで決定した前記静止開始時間から前記待ち時間決定ステップで決定した前記待ち時間が経過した場合に、前記測長器による前記本測定を実行する第2測定制御ステップと、
を有する測定装置の測定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、測長器を備え、測長器及びその測定対象のいずれか一方が測定点まで移動された場合に測長器による測定値の取得を実行する測定装置及び測定装置の測定方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
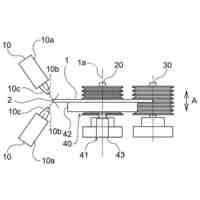
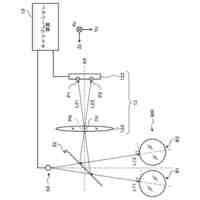
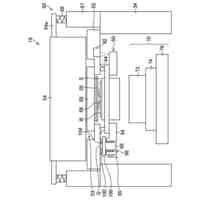
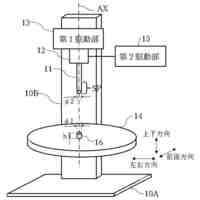
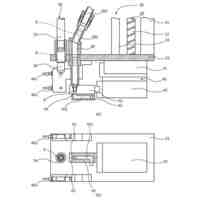
特許文献1には、NC(Numerically Control)工作機械の載物台の移動精度(移動量誤差とバックラッシュ)の測定に用いられる測定装置が開示されている。この測定装置はレーザ測長器を備える。レーザ測長器は、載物台上に配置されたコーナキューブに向けて測定光を出射し、コーナキューブにて反射された測定光の反射光を受光して、この反射光の受光信号に基づいてコーナキューブまでの距離の測定値を取得する。
【0003】
載物台の移動精度測定時には、NCコントローラが載物台の移動機構に対して載物台(コーナキューブ)を測定点(測定位置)まで目標移動量だけ移動させる指示を行った場合に、その移動前とその移動停止後にレーザ測長器が取得した測定値に基づいて載物台の実際の移動量を算出する。これにより、上述の目標移動量と、載物台の実際の移動量とを比較することで、載物台の移動精度が得られる。この際に、載物台の移動停止後のレーザ測長器による測定値の取得タイミングの決定に外部信号を用いると、載物台の残響振動中にレーザ測長器による測定値の取得が実行されるおそれがある。また、載物台の移動前後のレーザ測長器による測定値の取得を一定時間間隔で行うようにした場合には、載物台の移動/静止に関係なく、レーザ測長器が測定値を取得するおそれがある。
【0004】
そこで、特許文献1に記載の測定装置では、載物台(コーナキューブ)が測定点に移動する前からレーザ測長器による測定値の取得を繰り返し実行して、載物台の測定点への移動が完了したこと(測定点で静止したこと)をレーザ測長器の測定値の変化状態から判定している。具体的にはレーザ測長器により繰り返し取得される測定値に基づいて載物台の移動速度のカイ2乗検定の処理を実行して、操作者(ユーザ)が予め設定した条件が満たされたか否かに基づいて載物台が測定点で静止した否かを判定する。これにより、特許文献1に記載の測定装置では、載物台が測定点で静止した状態でのレーザ測長器による測定値の取得(本測定)を自動的に実行可能である。
【先行技術文献】
【特許文献】
【0005】
特開平10-225844号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上記特許文献1に記載の測定装置では、操作者が設定した条件が満たされた場合に載物台(コーナキューブ)が測定点で静止したと判定して、レーザ測長器による本測定を自動的に実行している。この際に、操作者が設定した条件(閾値)が不適切であると、操作者が意図しないばらつきを含んだ測定値(例えば残響振動中の測定値)をレーザ測長器が取得してしまう。また、条件の設定によってはレーザ測長器による本測定の開始までの時間が不必要に延びてしまい、測定時間が長時間になるおそれがある。
【0007】
本発明はこのような事情に鑑みてなされたものであり、従来よりも適切な条件で測長器による測定値の取得を実行可能な測定装置及び測定装置の測定方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の目的を達成するための測定装置は、測定対象までの距離の測定値を取得する測長器を備え、測長器及び測定対象のいずれか一方が予め定められた測定点まで移動された場合に測長器による測定値の取得を実行する測定装置において、一方の測定点への移動が開始されてから、測長器による測定値の取得を繰り返し実行させる第1測定制御部と、測長器により繰り返し取得される測定値に基づいて、測定値のばらつきを表す指標の演算を繰り返し実行する指標演算部と、指標演算部が演算した指標が予め定められた閾値以下となった時間を一方が測定点で静止した静止開始時間として決定する静止開始時間決定部と、測長器により繰り返し取得される測定値と測定値の取得間隔とに基づいて、一方の移動速度の演算を繰り返し実行する移動速度演算部と、移動速度演算部の演算結果から得られる一方の移動速度情報に基づいて、静止開始時間決定部が決定した静止開始時間から測長器が測定点で測定値の本測定を開始するまでの待ち時間を決定する待ち時間決定部と、静止開始時間決定部が決定した静止開始時間から待ち時間決定部が決定した待ち時間が経過した場合に、測長器による本測定を実行する第2測定制御部と、を備える。
【0009】
この測定装置によれば、移動速度情報に応じた適切な待ち時間を自動的に決定することができる。
【0010】
本発明の他の態様に係る測定装置において、移動速度情報が、移動速度の最大値及び移動速度の減速中の移動速度の時間変化の少なくともいずれか一方を含む。これにより、移動速度の最大値及び減速中の時間変化の少なくとも一方に応じた適切な待ち時間を自動的に決定することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東京精密
研削装置
10日前
株式会社東京精密
ロッカー
4日前
株式会社東京精密
レーザ加工装置
1か月前
株式会社東京精密
カーフ洗浄装置
1か月前
株式会社東京精密
検査装置、及び、検査方法
23日前
株式会社東京精密
CMP装置、及び、CMP方法
14日前
株式会社東京精密
カメラのキャリブレーション方法
1か月前
株式会社東京精密
カメラのキャリブレーション方法
1か月前
株式会社東京精密
プローバ、及び、プローブ検査方法
3日前
株式会社東京精密
校正データの管理方法及び形状測定機
1か月前
株式会社東京精密
ダイシング方法およびダイシングシステム
4日前
株式会社東京精密
非接触温度測定装置及び非接触温度測定方法
1か月前
株式会社東京精密
スタイラス姿勢決定方法及びスタイラス姿勢決定装置
9日前
株式会社東京精密
加工装置
15日前
株式会社東京精密
プローバ
28日前
株式会社東京精密
研削装置
1か月前
株式会社東京精密
プローバ
1か月前
株式会社東京精密
光変調装置
10日前
株式会社東京精密
カメラのキャリブレーション方法及びキャリブレーション装置
1か月前
株式会社東京精密
チャックテーブル
1か月前
株式会社東京精密
ツルアー成形方法
1か月前
株式会社東京精密
吸着装置及びその制御方法
1か月前
株式会社東京精密
面取り研削方法及び面取り研削装置
1日前
株式会社東京精密
シリコンウエハのエッジ品質向上方法
1か月前
株式会社東京精密
真空チャック及びそれを備える検査装置
2か月前
個人
タップ
4か月前
個人
フライス盤
2日前
個人
加工機
4か月前
麗豊実業股フン有限公司
ラクトバチルス・パラカセイNB23菌株及びそれを筋肉量の増加や抗メタボリック症候群に用いる用途
3か月前
日東精工株式会社
ねじ締め機
5か月前
株式会社北川鉄工所
回転装置
3か月前
株式会社不二越
ドリル
5か月前
日東精工株式会社
ねじ締め機
3か月前
日東精工株式会社
ねじ締め機
21日前
株式会社不二越
ドリル
4か月前
日東精工株式会社
ねじ締め機
2日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ