TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025128431
公報種別
公開特許公報(A)
公開日
2025-09-03
出願番号
2024025029
出願日
2024-02-22
発明の名称
スタイラス姿勢決定方法及びスタイラス姿勢決定装置
出願人
株式会社東京精密
代理人
個人
,
個人
,
個人
,
個人
主分類
G01B
5/00 20060101AFI20250827BHJP(測定;試験)
要約
【課題】被測定面が複雑形状であってもスタイラスの最適姿勢の決定に要する演算コストを低減可能なスタイラス姿勢決定方法及びスタイラス姿勢決定装置を提供する。
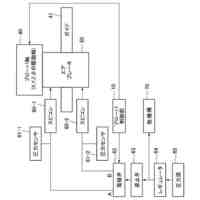
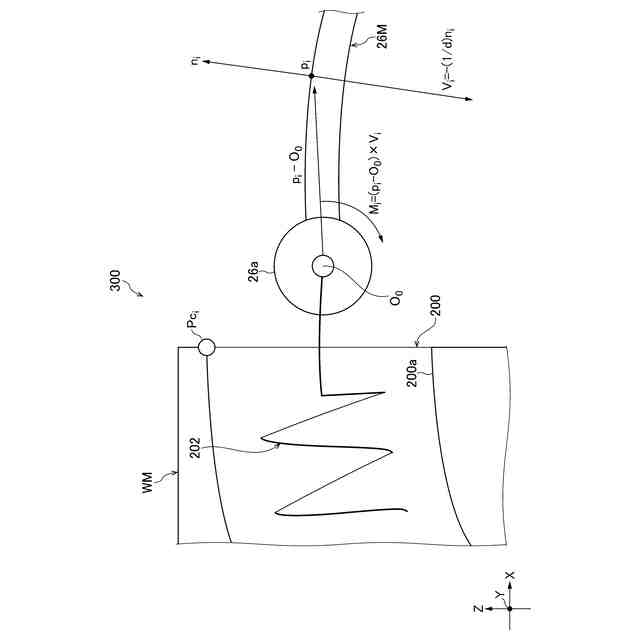
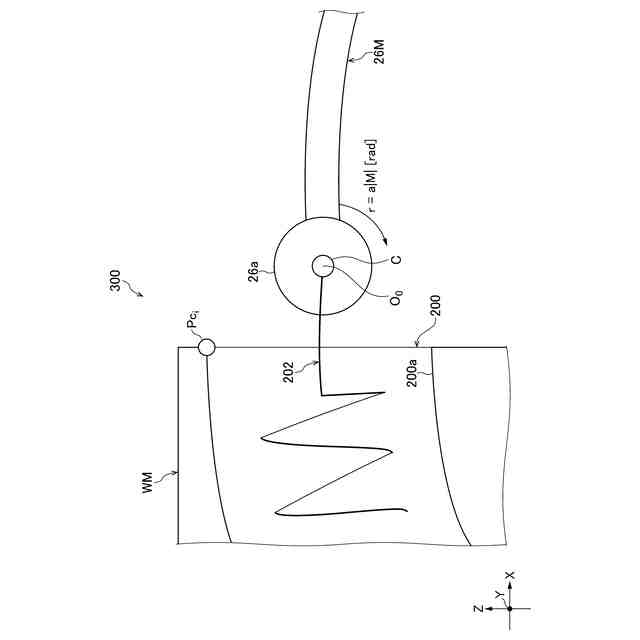
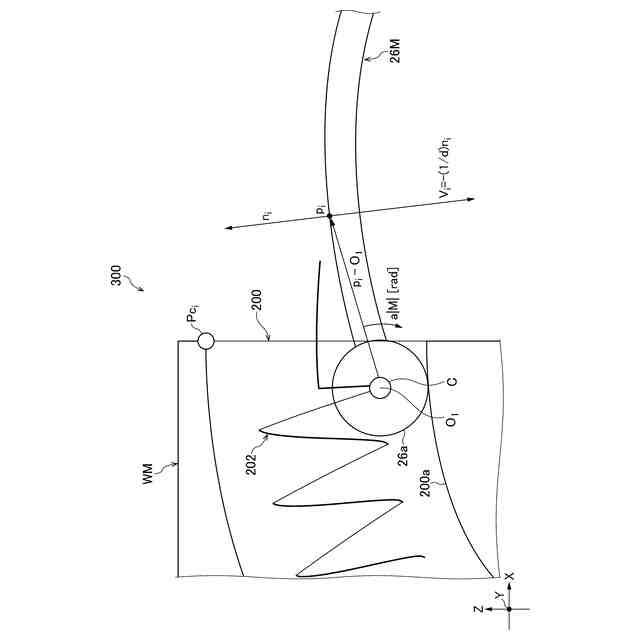
【解決手段】回転軸Cを中心としてスタイラスモデル26Mを回転させながら、スタイラスモデル26Mの複数の回転角度位置で評価点設定部126からモーメント演算部138までを繰り返し作動させる繰り返し制御部140と、回転角度位置ごとのモーメント演算部138の演算結果に基づいて、回転軸Cの軸周り方向におけるスタイラス26の最適姿勢を決定する最適姿勢決定部142と、を備え、測定パス202上の複数の測定パス位置O
n
ごとに、初期設定部124から最適姿勢決定部142までを繰り返し作動させる。
【選択図】図7
特許請求の範囲
【請求項1】
被測定面に沿って予め設定された測定パスに沿って座標測定機のスタイラスの先端を移動させる場合における、前記測定パス上の複数の位置での前記スタイラスの姿勢を決定するスタイラス姿勢決定方法において、
前記被測定面をモデル化した被測定面モデル、及び前記スタイラスをモデル化したスタイラスモデルを取得するモデル取得ステップと、
前記被測定面モデルに沿って設定された前記測定パス上の位置である測定パス位置に前記スタイラスモデルの前記先端をセットする初期設定ステップと、
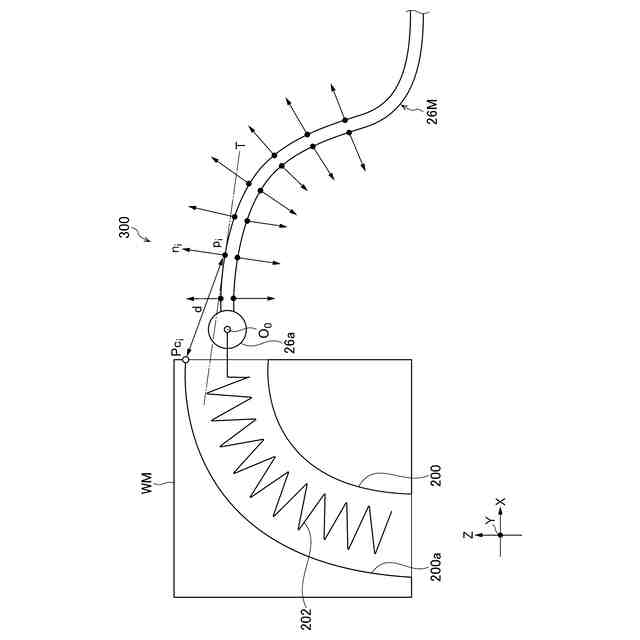
前記スタイラスモデルの表面に沿って複数の評価点を設定する評価点設定ステップと、
前記スタイラスモデルの表面に前記評価点ごとに法線を設定する法線設定ステップと、
前記評価点ごとに、前記評価点との距離が最短距離となる最短距離点を前記被測定面モデルに設定する最短距離点設定ステップと、
前記法線の方向を法線方向とした場合に、前記評価点ごとに、前記評価点に対応する前記最短距離点が前記評価点における前記スタイラスモデルの接平面よりも前記評価点の前記法線方向側に位置する条件を満たすか否かを判定する判定ステップと、
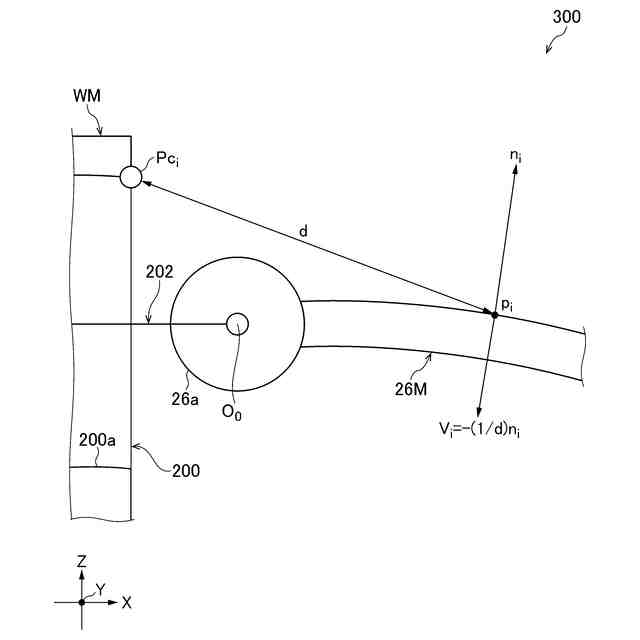
前記判定ステップの判定結果に基づいて、前記条件を満たす前記評価点である適合評価点ごとに、前記適合評価点と前記最短距離点との間の距離ベクトルを演算する距離ベクトル演算ステップと、
前記距離ベクトル演算ステップの演算結果に基づいて、前記適合評価点ごとに、前記適合評価点に対して前記法線方向とは反対方向に仮想的に加えられる圧力ベクトルを演算する圧力ベクトル演算ステップと、
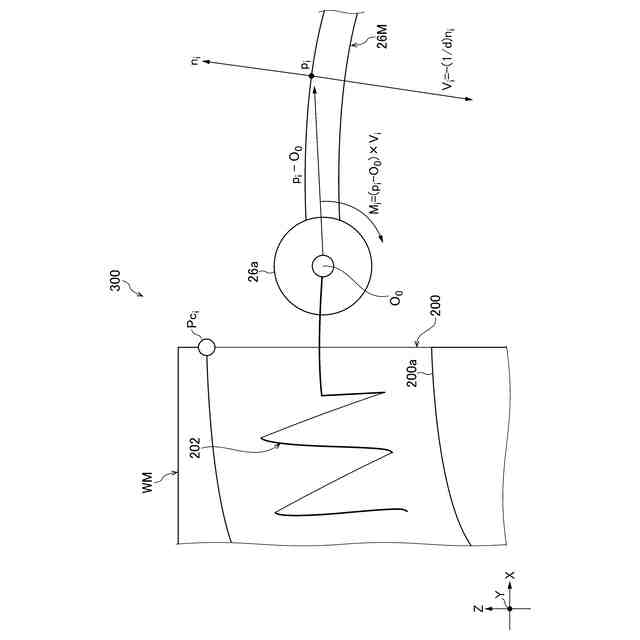
前記圧力ベクトル演算ステップの演算結果に基づいて、前記適合評価点ごとに、前記測定パス位置を中心とする仮想のモーメントを演算するモーメント演算ステップと、
前記測定パス位置に設定した回転軸を中心として前記スタイラスモデルを回転させながら、前記スタイラスモデルの複数の回転角度位置で前記評価点設定ステップから前記モーメント演算ステップまでの処理を繰り返し実行する繰り返し制御ステップと、
前記回転角度位置ごとの前記モーメント演算ステップの演算結果に基づいて、前記回転軸の軸周り方向における前記スタイラスの最適姿勢を決定する最適姿勢決定ステップと、
を有し、
前記測定パス上の複数の前記測定パス位置ごとに前記初期設定ステップから前記最適姿勢決定ステップまでを繰り返し実行するスタイラス姿勢決定方法。
続きを表示(約 1,600 文字)
【請求項2】
前記モーメント演算ステップでは、前記適合評価点ごとの前記モーメントの合計モーメントを演算し、
前記最適姿勢決定ステップでは、前記回転角度位置ごとに前記モーメント演算ステップで演算した前記合計モーメントに基づいて、前記最適姿勢を決定する請求項1に記載のスタイラス姿勢決定方法。
【請求項3】
前記判定ステップでは、前記評価点ごとに、前記距離ベクトルの方向と前記法線方向とのなす角度がπ/2未満であるか否かに基づいて前記条件を満たすか否かを判定する請求項1に記載のスタイラス姿勢決定方法。
【請求項4】
前記圧力ベクトル演算ステップで演算する前記圧力ベクトルの大きさは、前記距離ベクトルの大きさに反比例する請求項1に記載のスタイラス姿勢決定方法。
【請求項5】
前記測定パス位置ごとに、前記最適姿勢決定ステップで決定した前記最適姿勢を記憶部に記憶させる記憶ステップを実行する請求項1から4のいずれか1項に記載のスタイラス姿勢決定方法。
【請求項6】
非直線状の前記被測定面に応じて前記測定パスが非直線状に設定されている請求項1から4のいずれか1項に記載のスタイラス姿勢決定方法。
【請求項7】
前記スタイラスが非直線状である請求項6に記載のスタイラス姿勢決定方法。
【請求項8】
被測定面に沿って予め設定された測定パスに沿って座標測定機のスタイラスの先端を移動させる場合における、前記測定パス上の複数の位置での前記スタイラスの姿勢を決定するスタイラス姿勢決定装置において、
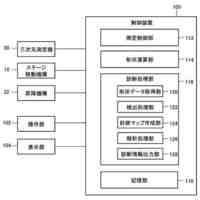
前記被測定面をモデル化した被測定面モデル、及び前記スタイラスをモデル化したスタイラスモデルを取得するモデル取得部と、
前記被測定面モデルに沿って設定された前記測定パス上の位置である測定パス位置に前記スタイラスモデルの先端をセットする初期設定部と、
前記スタイラスモデルの表面に沿って複数の評価点を設定する評価点設定部と、
前記スタイラスモデルの表面に前記評価点ごとに法線を設定する法線設定ステップと、
前記評価点ごとに、前記評価点との距離が最短距離となる最短距離点を前記被測定面モデルに設定する最短距離点設定部と、
前記法線の方向を法線方向した場合に、前記評価点ごとに、前記評価点に対応する前記最短距離点が前記評価点における前記スタイラスモデルの接平面よりも前記評価点の前記法線方向側に位置する条件を満たすか否かを判定する判定部と、
前記判定部の判定結果に基づいて、前記条件を満たす前記評価点である適合評価点ごとに、前記適合評価点と前記最短距離点との間の距離ベクトルを演算する距離ベクトル演算部と、
前記距離ベクトル演算部の演算結果に基づいて、前記適合評価点ごとに、前記適合評価点に対して前記法線方向とは反対方向に仮想的に加えられる圧力ベクトルを演算する圧力ベクトル演算部と、
前記圧力ベクトル演算部の演算結果に基づいて、前記適合評価点ごとに、前記測定パス位置を中心とする仮想のモーメントを演算するモーメント演算部と、
前記測定パス位置に設定した回転軸を中心として前記スタイラスモデルを回転させながら、前記スタイラスモデルの複数の回転角度位置で前記評価点設定部から前記モーメント演算部までを繰り返し作動させる繰り返し制御部と、
前記回転角度位置ごとの前記モーメント演算部の演算結果に基づいて、前記回転軸の軸周り方向における前記スタイラスの最適姿勢を決定する最適姿勢決定部と、
を備え、
前記測定パス上の複数の前記測定パス位置ごとに、前記初期設定部から前記最適姿勢決定部までを繰り返し作動させるスタイラス姿勢決定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、測定パス上の複数の位置ごとにスタイラスの姿勢を決定するスタイラス姿勢決定方法及びスタイラス姿勢決定装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
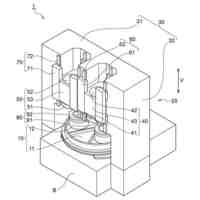
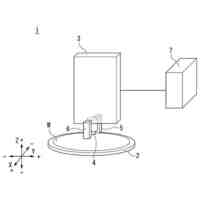
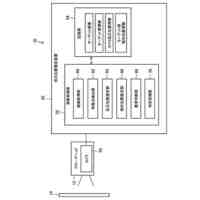
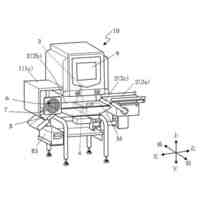
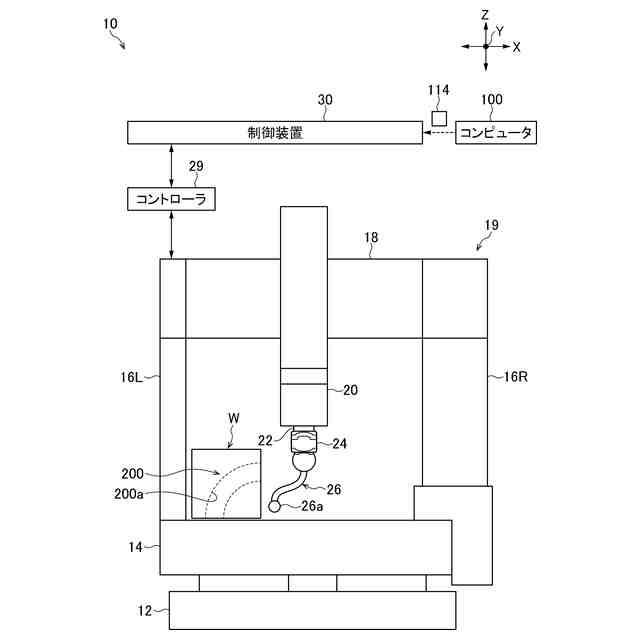
従来、スタイラスの位置及び姿勢を変位させる駆動部を有し、このスタイラスの先端の接触子をワーク(被測定物)に形成されている各種測定要素(例えば円穴、平面、球等)の被測定面に接触(プロービング)させることにより、測定要素の寸法及び形状等の様々な測定項目の測定を実行する三次元座標測定機が知られている。
【0003】
このような三次元座標測定機では、ワークに関する複数の測定項目が規定された測定プログラムに基づいて、測定要素の被測定面に沿って設定された測定パス(測定経路)に沿ってスタイラスの位置及び姿勢を変位させながら被測定面に接触子を接触させることにより、測定項目に対応した測定を行う(特許文献1参照)。このため、三次元座標測定機によるワークの測定に先立って、ワーク及びスタイラスのCAD(Computer Aided Design)モデルを用いて、いくつかのスタイラスの姿勢候補を用意して衝突シミュレーションを行うことでスタイラスの最適姿勢を決定している。
【先行技術文献】
【特許文献】
【0004】
特開2015-222196号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
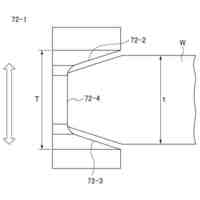
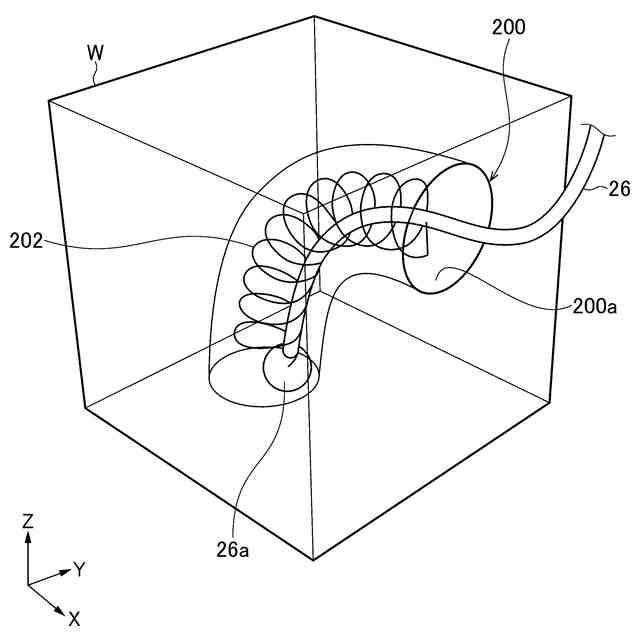
近年、アディティブ・マニュファクチャリングにより従来では製造が困難な形状のワークの製造が可能になっている。このため、ワークの測定要素についても複雑形状(例えば湾曲穴及び湾曲した隙間など)になる。このため、複雑形状の測定要素の被測定面に沿って設定された測定パス上でのスタイラスの最適姿勢を上述の衝突シミュレーションで決定するためには、スタイラスの姿勢候補を多数用意(角度分解能を細かく)する必要があり、トライ回数が増加する。このため、演算(計算)コストが増加するという問題がある。
【0006】
本発明はこのような事情に鑑みてなされたものであり、被測定面が複雑形状であってもスタイラスの最適姿勢の決定に要する演算コストを低減可能なスタイラス姿勢決定方法及びスタイラス姿勢決定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
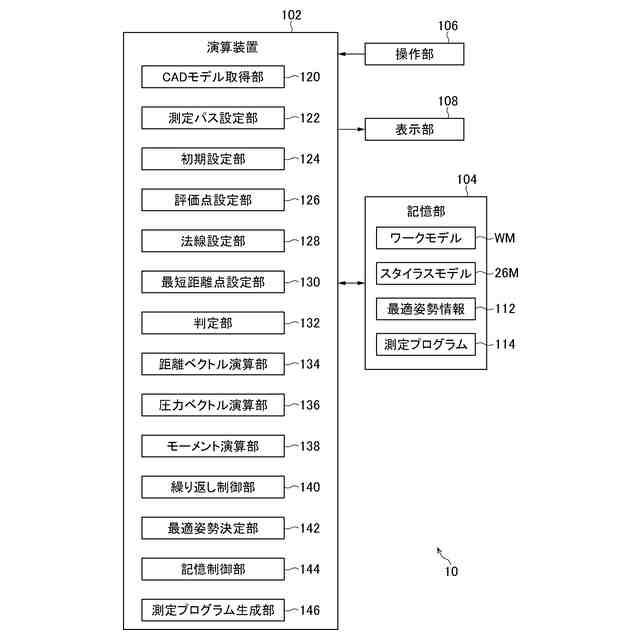
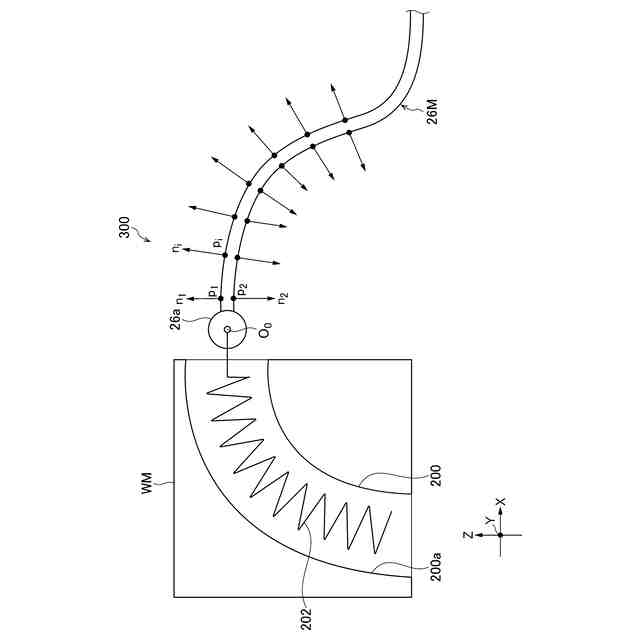
本発明の目的を達成するためのスタイラス姿勢決定方法は、被測定面に沿って予め設定された測定パスに沿って座標測定機のスタイラスの先端を移動させる場合における、測定パス上の複数の位置でのスタイラスの姿勢を決定するスタイラス姿勢決定方法において、被測定面をモデル化した被測定面モデル、及びスタイラスをモデル化したスタイラスモデルを取得するモデル取得ステップと、被測定面モデルに沿って設定された測定パス上の位置である測定パス位置にスタイラスモデルの先端をセットする初期設定ステップと、スタイラスモデルの表面に沿って複数の評価点を設定する評価点設定ステップと、スタイラスモデルの表面に評価点ごとに法線を設定する法線設定ステップと、評価点ごとに、評価点との距離が最短距離となる最短距離点を被測定面モデルに設定する最短距離点設定ステップと、法線の方向を法線方向とした場合に、評価点ごとに、評価点に対応する最短距離点が評価点におけるスタイラスモデルの接平面よりも評価点の法線方向側に位置する条件を満たすか否かを判定する判定ステップと、判定ステップの判定結果に基づいて、条件を満たす評価点である適合評価点ごとに、適合評価点と最短距離点との間の距離ベクトルを演算する距離ベクトル演算ステップと、距離ベクトル演算ステップの演算結果に基づいて、適合評価点ごとに、適合評価点に対して法線方向とは反対方向に仮想的に加えられる圧力ベクトルを演算する圧力ベクトル演算ステップと、圧力ベクトル演算ステップの演算結果に基づいて、適合評価点ごとに、測定パス位置を中心とする仮想のモーメントを演算するモーメント演算ステップと、測定パス位置に設定した回転軸を中心としてスタイラスモデルを回転させながら、スタイラスモデルの複数の回転角度位置で評価点設定ステップからモーメント演算ステップまでの処理を繰り返し実行する繰り返し制御ステップと、回転角度位置ごとのモーメント演算ステップの演算結果に基づいて、回転軸の軸周り方向におけるスタイラスの最適姿勢を決定する最適姿勢決定ステップと、を有し、測定パス上の複数の測定パス位置ごとに初期設定ステップから最適姿勢決定ステップまでを繰り返し実行する。
【0008】
このスタイラス姿勢決定方法によれば、被測定面が複雑形状であったとしても、この被測定面に沿って設定された測定パス上の測定パス位置ごとのスタイラスの最適姿勢を簡単に決定することができる。
【0009】
本発明の他の態様に係るスタイラス姿勢決定方法において、モーメント演算ステップでは、適合評価点ごとのモーメントの合計モーメントを演算し、最適姿勢決定ステップでは、回転角度位置ごとにモーメント演算ステップで演算した合計モーメントに基づいて、最適姿勢を決定する。
【0010】
本発明の他の態様に係るスタイラス姿勢決定方法において、判定ステップでは、評価点ごとに、距離ベクトルの方向と法線方向とのなす角度がπ/2未満であるか否かに基づいて条件を満たすか否かを判定する。これにより、最短距離点が評価点における接平面よりも評価点の法線方向側に位置する条件を満たすか否かを判定可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東京精密
加工装置
14日前
株式会社東京精密
プローバ
今日
株式会社東京精密
プローバ
14日前
株式会社東京精密
ロッカー
25日前
株式会社東京精密
プローバ
4日前
株式会社東京精密
加工装置
今日
株式会社東京精密
プローバ
1日前
株式会社東京精密
加工装置
14日前
株式会社東京精密
電池検査装置
4日前
株式会社東京精密
スラリー供給装置
15日前
株式会社東京精密
校正方法及び校正装置
今日
株式会社東京精密
測定装置及び移動体の制御方法
4日前
株式会社東京精密
測定機の管理方法及び管理装置
4日前
株式会社東京精密
測定装置及び移動体の制御方法
4日前
株式会社東京精密
測定装置及び移動体の制御方法
4日前
株式会社東京精密
内径測定装置及びそのシステム
今日
株式会社東京精密
測定装置及び移動体の制御方法
4日前
株式会社東京精密
プローバ、及び、プローブ検査方法
24日前
株式会社東京精密
コントローラ、及び、監視システム
7日前
株式会社東京精密
CMP装置およびその研磨温度制御方法
今日
株式会社東京精密
基板加工装置及び加工済基板の製造方法
今日
株式会社東京精密
レーザー加工装置及びレーザー加工方法
今日
株式会社東京精密
自己位置推定装置及び自己位置推定方法
今日
株式会社東京精密
自己位置推定装置及び自己位置推定方法
今日
株式会社東京精密
ダイシング方法およびダイシングシステム
25日前
株式会社東京精密
診断装置及び診断方法並びに針跡検査装置
今日
株式会社東京精密
エッチングシステム、及び、エッチング方法
7日前
株式会社東京精密
スタイラス姿勢決定方法及びスタイラス姿勢決定装置
1か月前
株式会社東京精密
CMP装置及びCMP装置を用いた研磨済ワークの製造方法
2日前
株式会社東京精密
自己位置推定装置及び自己位置推定方法並びにカメラ相対位置調整方法
今日
株式会社東京精密
ウェーハ試験装置のチャックの表面処理方法及びウェーハ試験装置のチャック
4日前
株式会社東京精密
面取り研削方法及び面取り研削装置
22日前
株式会社東京精密
ワーク加工装置及びワーク加工方法
3日前
個人
計量スプーン
24日前
個人
微小振動検出装置
1か月前
株式会社イシダ
X線検査装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ