TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025145428
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024045604
出願日
2024-03-21
発明の名称
自己位置推定装置及び自己位置推定方法
出願人
株式会社東京精密
代理人
個人
,
個人
,
個人
,
個人
主分類
G01C
15/00 20060101AFI20250926BHJP(測定;試験)
要約
【課題】三次元空間のターゲットと画像上のターゲットの関連付けを容易にしつつ、プローブヘッドの自己位置を高精度に推定することができる自己位置推定装置及び自己位置推定方法を提供する。
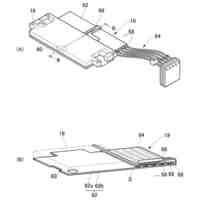
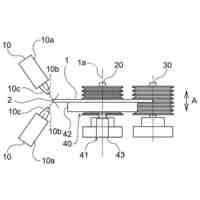
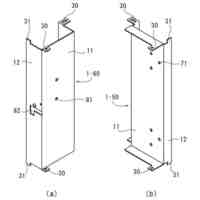
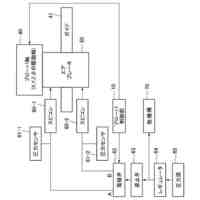
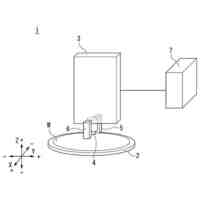
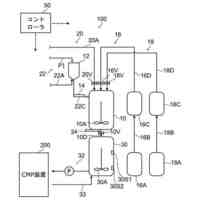
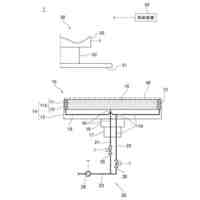
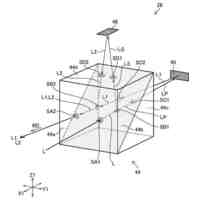
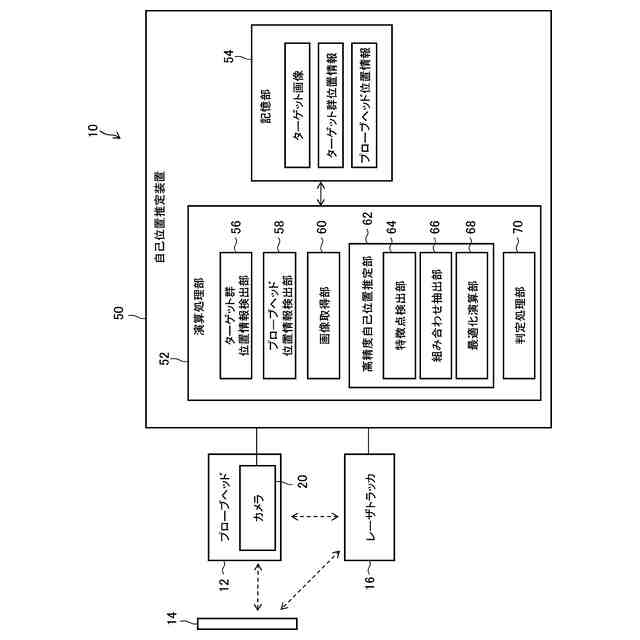
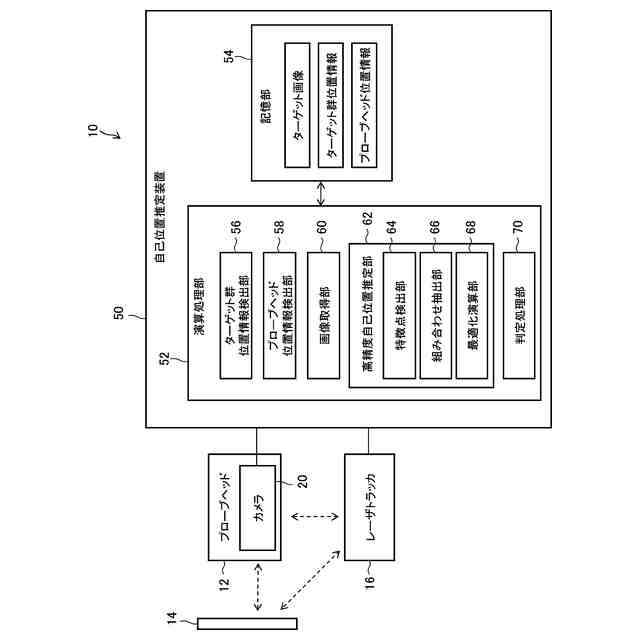
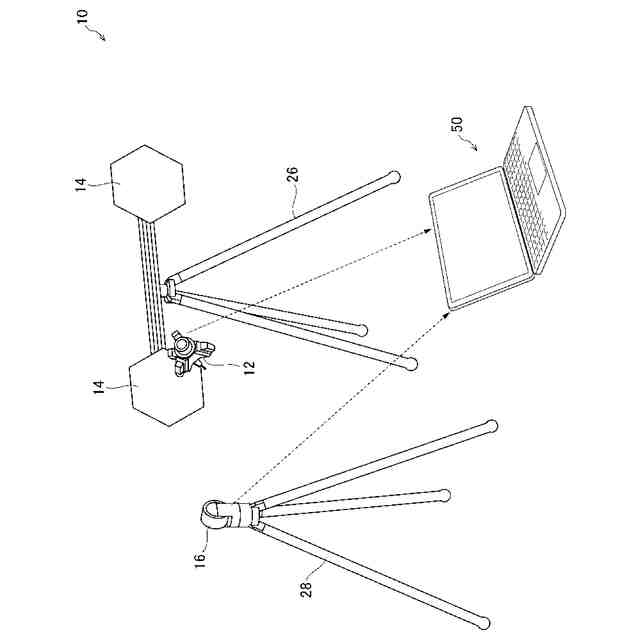
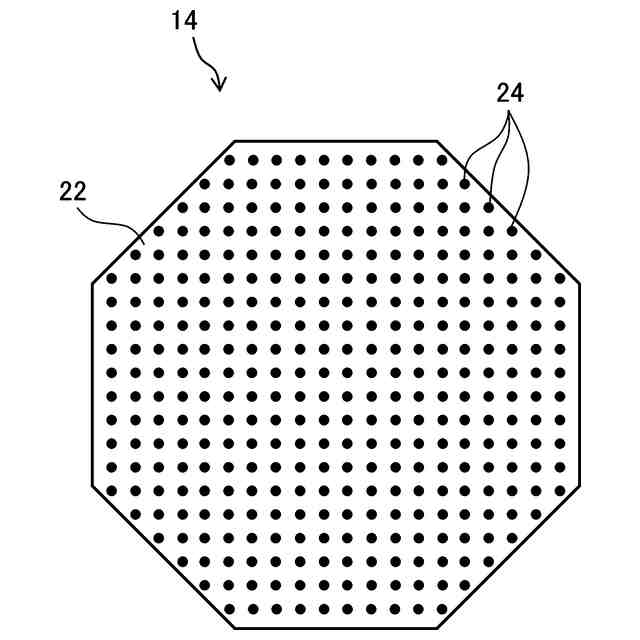
【解決手段】自己位置推定装置50は、複数のターゲット24を有するターゲット群14とプローブヘッド12との相対的な位置関係を示す相対位置情報を相対位置情報検出部(ターゲット群位置情報検出部56及びプローブヘッド位置情報検出部58)と、プローブヘッド12に搭載されたカメラ20がターゲット群14を撮影した画像を取得する画像取得部60と、相対位置情報と画像とを用いて、ターゲット群14に対するプローブヘッド12の位置及び姿勢を相対位置情報よりも高い精度で検出する高精度自己位置推定部62と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
複数のターゲットを有するターゲット群とプローブヘッドとの相対的な位置関係を示す相対位置情報を検出する相対位置情報検出部と、
前記プローブヘッドに搭載されたカメラが前記ターゲット群を撮影した画像を取得する画像取得部と、
前記相対位置情報と前記画像とに基づき、前記ターゲット群に対する前記プローブヘッドの位置及び姿勢を検出する高精度自己位置推定部と、
を備える自己位置推定装置。
続きを表示(約 1,100 文字)
【請求項2】
前記高精度自己位置推定部は、
前記画像上から各前記ターゲットの位置を示す特徴点を検出する特徴点検出部と、
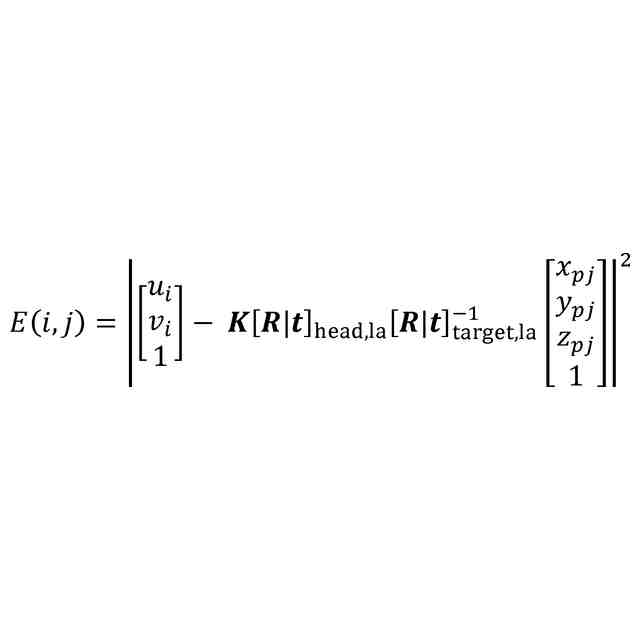
前記特徴点検出部で検出された各前記特徴点と、三次元空間における各前記ターゲットの位置を示す物体点との対応関係を示す誤差関数が最小となるように、前記特徴点と前記物体点との組み合わせを抽出する組み合わせ抽出部と、
前記組み合わせ抽出部で抽出された前記特徴点と前記物体点との組み合わせに基づき、前記ターゲット群に対する前記プローブヘッドの位置及び姿勢を最適化演算により求める最適化演算部と、
を有する、請求項1に記載の自己位置推定装置。
【請求項3】
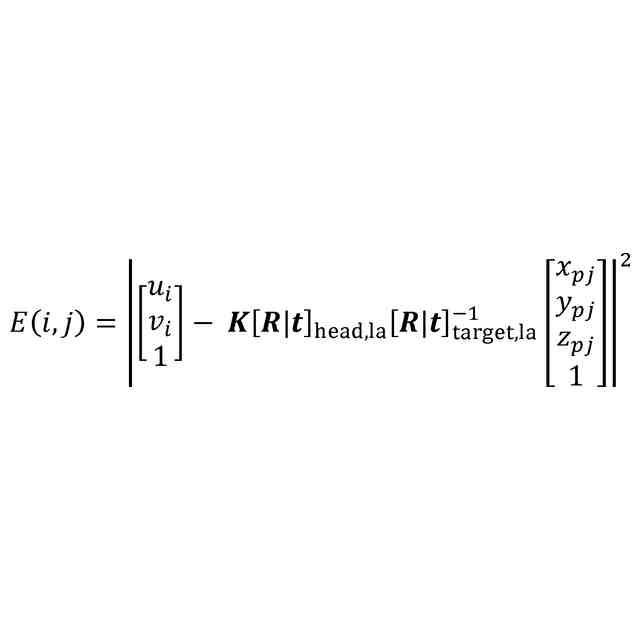
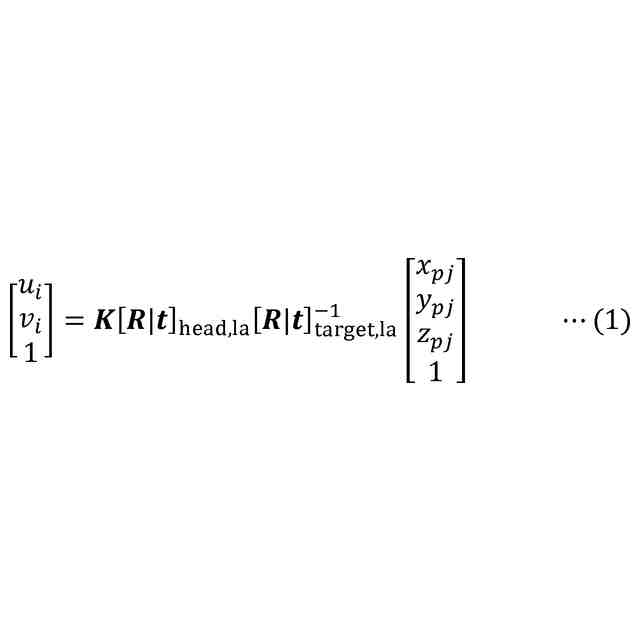
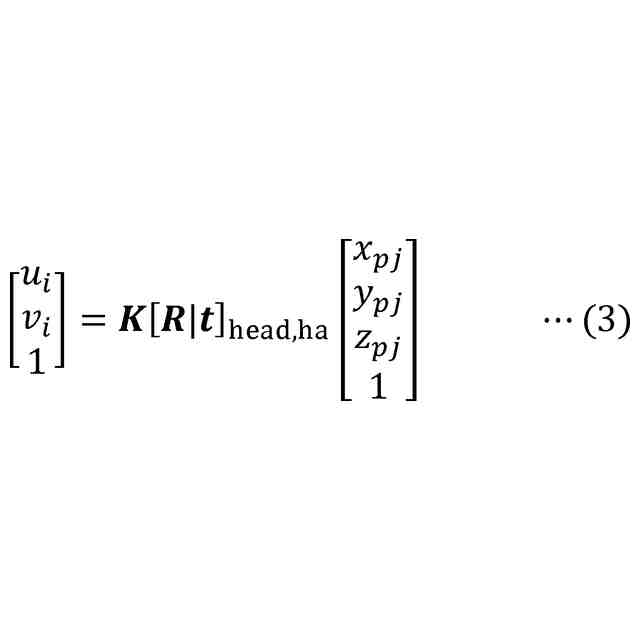
ワールド座標系からターゲット群座標系への変換行列を[R|t]
target,la
とし、前記ワールド座標系からヘッド座標系への変換行列を[R|t]
head,la
とし、前記画像上における前記特徴点の座標を(u
i
,v
i
)とし、前記物体点の座標を(x
pj
,y
pj
,z
pj
)とし、前記誤差関数をE(i,j)とした場合(但し、i及びjは変数)、
前記誤差関数E(i,j)が以下の式で示される、請求項2に記載の自己位置推定装置。
TIFF
2025145428000006.tif
27
170
【請求項4】
前記相対位置情報は、前記プローブヘッドとは別体の測定装置の測定結果に基づいて検出された情報である、
請求項1から3のいずれか1項に記載の自己位置推定装置。
【請求項5】
前記測定装置は、レーザトラッカである、
請求項4に記載の自己位置推定装置。
【請求項6】
前記プローブヘッドは、SLAM機能部を備えており、
前記相対位置情報は、前記SLAM機能部の測定結果に基づいて検出された情報である、
請求項1から3のいずれか1項に記載の自己位置推定装置。
【請求項7】
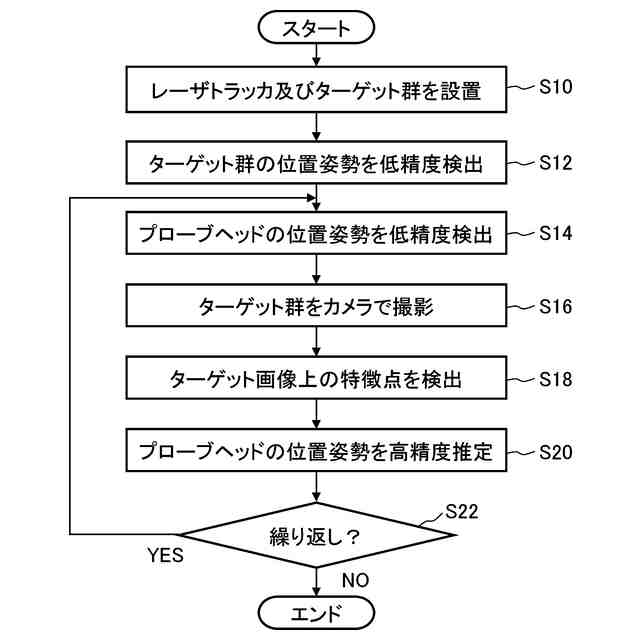
プローブヘッドとターゲット群との相対的な位置関係を示す相対位置情報を検出する相対位置情報検出ステップと、
前記プローブヘッドに搭載されたカメラが前記ターゲット群を撮影した画像を取得する画像取得ステップと、
前記相対位置情報と前記画像とに基づき、前記ターゲット群に対する前記プローブヘッドの位置及び姿勢を検出する高精度自己位置推定ステップと、
を含む自己位置推定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、プローブヘッドの自己位置を推定可能な自己位置推定装置及び自己位置推定方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来より、ポータブル型の三次元座標測定機(CMM:Coordinate Measuring Machine)をロボットに持たせて、大物ワークの測定を自動で行うことが行われている。数十μm程度の精度要求に対しては、ポータブル型の三次元座標測定機にて要求を満足しつつあるが、十μm以下の高精度要求においてはブリッジ型の三次元座標測定機で対応しているのが現状である。
【0003】
また、数十μm程度の精度を実現するための技術として、レーザトラッカやマーカを利用した測定方法が知られている(例えば、特許文献1参照)。これらは、ベースステーションに仰角と方位角の首振り機能を備えており、さらに距離センサ又はカメラを備えて測定ヘッドの距離や姿勢を計算する。この測定方法によれば、首振り機構の可動範囲や距離センサの測長範囲が長いため、広範囲での測定が可能となる。
【0004】
一方、三次元空間上の位置が既知のターゲットをカメラで撮影した画像から自己位置(位置及び姿勢)を検出する方法が知られている(例えば、特許文献2参照)。この方法によれば、各ターゲットの三次元空間上の位置と、撮影された画像上の各ターゲットの位置とを関連付けて計算を行うことにより、比較的単純な機構で高精度(5μm以下)を得やすいメリットがある。
【先行技術文献】
【特許文献】
【0005】
特開2020-148515号公報
特開2022-30807号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、レーザトラッカやマーカなどを利用した測定方法では、主に首振り機構の角度精度の限界により、ベースステーションと測定ヘッドの距離が大きくなるに従い測定精度が悪化する傾向になる。
【0007】
また、カメラを用いてターゲットを撮影した画像から自己位置を検出する方法では、広い測定範囲を得ることが難しい。また、各ターゲットの三次元空間上の位置と、撮影された画像上の各ターゲットの位置とが紐づいていなくてはならないため、対応付けの探索に時間がかかるデメリットもある。
【0008】
本発明はこのような事情に鑑みてなされたもので、三次元空間のターゲットと画像上のターゲットの関連付けを容易にしつつ、プローブヘッドの自己位置を高精度に推定することができる自己位置推定装置及び自己位置推定方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、上記目的を達成するために以下の態様からなる。
【0010】
第1態様に係る自己位置推定装置は、複数のターゲットを有するターゲット群とプローブヘッドとの相対的な位置関係を示す相対位置情報を検出する相対位置情報検出部と、プローブヘッドに搭載されたカメラがターゲット群を撮影した画像を取得する画像取得部と、相対位置情報と画像とに基づき、ターゲット群に対するプローブヘッドの位置及び姿勢を検出する高精度自己位置推定部と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東京精密
プローバ
4日前
株式会社東京精密
プローバ
今日
株式会社東京精密
研削装置
1か月前
株式会社東京精密
ロッカー
25日前
株式会社東京精密
プローバ
14日前
株式会社東京精密
加工装置
今日
株式会社東京精密
加工装置
14日前
株式会社東京精密
加工装置
14日前
株式会社東京精密
プローバ
1日前
株式会社東京精密
電池検査装置
4日前
株式会社東京精密
スラリー供給装置
15日前
株式会社東京精密
校正方法及び校正装置
今日
株式会社東京精密
検査装置、及び、検査方法
1か月前
株式会社東京精密
測定装置及び移動体の制御方法
4日前
株式会社東京精密
測定装置及び移動体の制御方法
4日前
株式会社東京精密
測定装置及び移動体の制御方法
4日前
株式会社東京精密
CMP装置、及び、CMP方法
1か月前
株式会社東京精密
内径測定装置及びそのシステム
今日
株式会社東京精密
測定機の管理方法及び管理装置
4日前
株式会社東京精密
測定装置及び移動体の制御方法
4日前
株式会社東京精密
プローバ、及び、プローブ検査方法
24日前
株式会社東京精密
コントローラ、及び、監視システム
7日前
株式会社東京精密
レーザー加工装置及びレーザー加工方法
今日
株式会社東京精密
CMP装置およびその研磨温度制御方法
今日
株式会社東京精密
基板加工装置及び加工済基板の製造方法
今日
株式会社東京精密
自己位置推定装置及び自己位置推定方法
今日
株式会社東京精密
自己位置推定装置及び自己位置推定方法
今日
株式会社東京精密
ダイシング方法およびダイシングシステム
25日前
株式会社東京精密
診断装置及び診断方法並びに針跡検査装置
今日
株式会社東京精密
エッチングシステム、及び、エッチング方法
7日前
株式会社東京精密
スタイラス姿勢決定方法及びスタイラス姿勢決定装置
1か月前
株式会社東京精密
加工装置
1か月前
株式会社東京精密
光変調装置
1か月前
株式会社東京精密
CMP装置及びCMP装置を用いた研磨済ワークの製造方法
2日前
株式会社東京精密
自己位置推定装置及び自己位置推定方法並びにカメラ相対位置調整方法
今日
株式会社東京精密
ウェーハ試験装置のチャックの表面処理方法及びウェーハ試験装置のチャック
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ