TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025076572
公報種別
公開特許公報(A)
公開日
2025-05-16
出願番号
2023188185
出願日
2023-11-02
発明の名称
遠隔操作システム、遠隔制御装置、方法、およびコンピュータプログラム
出願人
株式会社クボタ
代理人
弁理士法人サンクレスト国際特許事務所
主分類
E02F
9/20 20060101AFI20250509BHJP(水工;基礎;土砂の移送)
要約
【課題】操作精度が低下するのを抑制することができる技術を提供する。
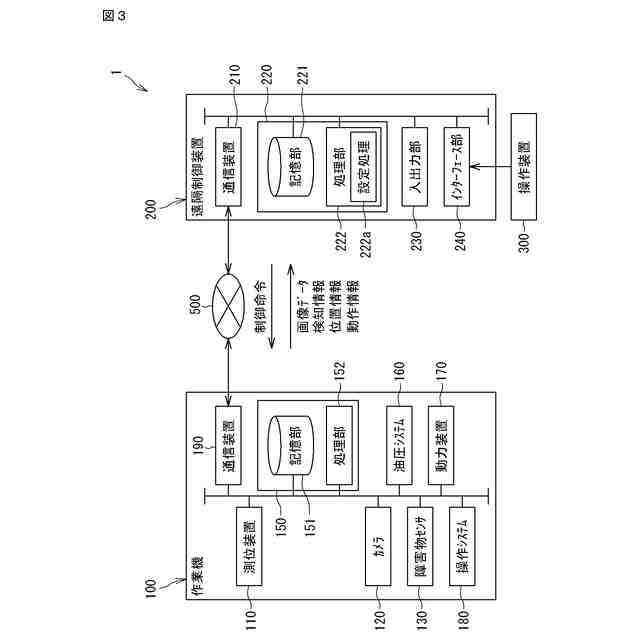
【解決手段】本開示は、作業動作を行う作業機100用の遠隔操作システム1である。遠隔操作システム1は、オペレータの操作入力によって中立位置から最大操作位置までの移動範囲を移動可能な操作レバーと、前記操作レバーの位置に基づいて前記作業動作を行わせるための制御命令を生成し、前記制御命令を前記作業機へ向けて無線送信する遠隔制御装置200と、を備える。遠隔制御装置200は、作業機100による前記作業動作を制限させる中立範囲を、前記移動範囲のうちの前記中立位置側に設定する設定処理を実行する処理部222を備える。前記設定処理は、作業機100との間の通信遅延を示す遅延情報を取得する処理と、前記遅延情報に基づいて前記中立範囲の大きさを調整する処理と、を含む。
【選択図】図3
特許請求の範囲
【請求項1】
作業動作を行う作業機用の遠隔操作システムであって、
オペレータの操作入力によって中立位置から最大操作位置までの移動範囲を移動可能な操作レバーと、
前記操作レバーの位置に基づいて前記作業動作を行わせるための制御命令を生成し、前記制御命令を前記作業機へ向けて無線送信する遠隔制御装置と、を備え、
前記遠隔制御装置は、
前記作業機による前記作業動作を制限させる中立範囲を、前記移動範囲のうちの前記中立位置側に設定する設定処理を実行する処理部を備え、
前記設定処理は、
前記作業機との間の通信遅延を示す遅延情報を取得する処理と、
前記遅延情報に基づいて前記中立範囲の大きさを調整する処理と、を含む
遠隔操作システム。
続きを表示(約 1,800 文字)
【請求項2】
前記遅延情報は、通信遅延時間を含み、
前記中立範囲は、前記通信遅延時間が増加するに従って拡張される
請求項1に記載の遠隔操作システム。
【請求項3】
前記遅延情報は、通信遅延時間を含み、
前記中立範囲の大きさを調整する処理は、
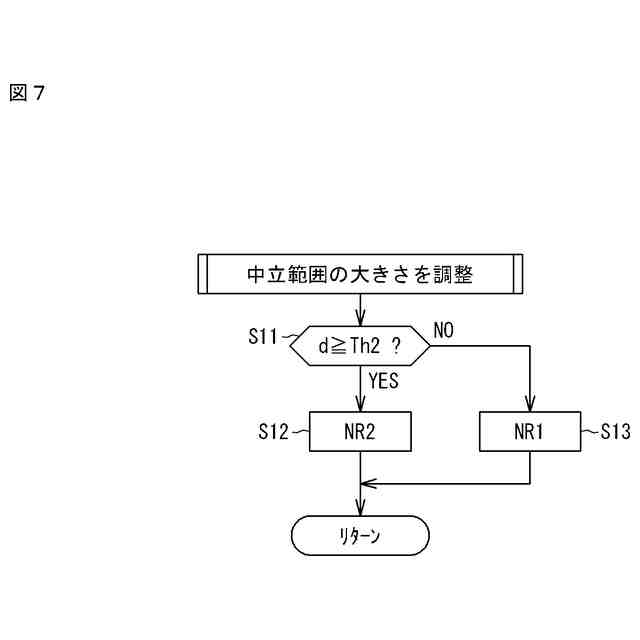
前記通信遅延時間と、所定の閾値と、を比較する処理と、
前記比較の結果に基づいて、第1の大きさ、および、前記第1の大きさよりも大きい第2の大きさの中から前記中立範囲の大きさを選択する処理と、を含む
請求項1に記載の遠隔操作システム。
【請求項4】
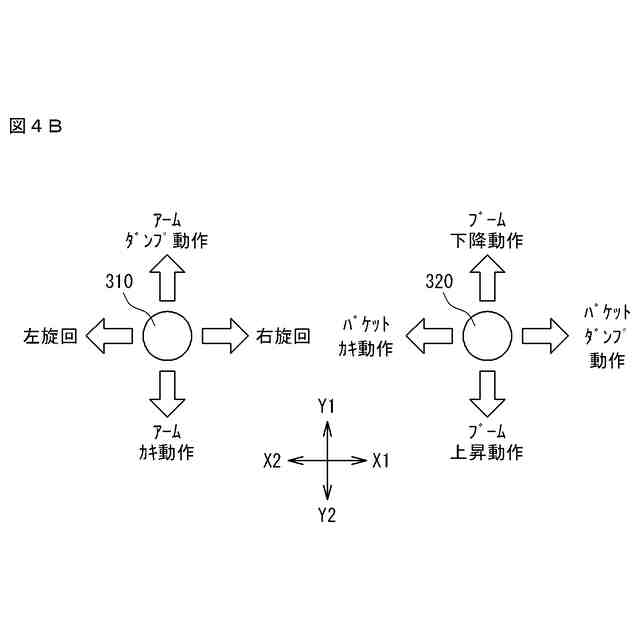
前記作業動作は、第1動作および前記第1動作と異なる第2動作を含み、
前記操作レバーは、前記中立位置から第1方向に移動可能であるとともに、前記第1方向と直交する第2方向に移動可能であり、
前記制御命令は、前記作業機に前記第1動作を行わせるための第1制御命令と、前記作業機に前記第2動作を行わせるための第2制御命令と、を含み、
前記第1制御命令は、前記中立位置から前記第1方向に沿う第1移動範囲における前記操作レバーの位置に基づいて生成される命令であり、
前記第2制御命令は、前記中立位置から前記第2方向に沿う第2移動範囲における前記操作レバーの位置に基づいて生成される命令であり、
前記中立範囲は、前記第1移動範囲に設定される第1中立範囲、および、前記第2移動範囲に設定される第2中立範囲を含み、
前記第1中立範囲の大きさ、および、前記第2中立範囲の大きさは、互いに異なるように調整される
請求項1に記載の遠隔操作システム。
【請求項5】
前記処理部は、前記操作レバーの位置が前記中立範囲に位置する場合、前記遠隔制御装置による前記制御命令の送信を停止する処理、および、前記作業動作を停止させる命令を前記制御命令に含める処理の少なくともいずれかをさらに実行する
請求項1に記載の遠隔操作システム。
【請求項6】
前記設定処理は、
前記作業機による前記作業動作を制限させる動作制限範囲を、前記移動範囲のうちの前記最大操作位置側に設定する処理と、
前記遅延情報に基づいて前記動作制限範囲の大きさを調整する処理と、をさらに含む
請求項1に記載の遠隔操作システム。
【請求項7】
前記作業動作は、第1動作および前記第1動作と異なる第2動作を含み、
前記操作レバーは、前記中立位置から第1方向に移動可能であるとともに、前記第1方向と直交する第2方向に移動可能であり、
前記制御命令は、前記作業機に前記第1動作を行わせるための第1制御命令と、前記作業機に前記第2動作を行わせるための第2制御命令と、を含み、
前記第1制御命令は、前記中立位置から前記第1方向に沿う第1移動範囲における前記操作レバーの位置に基づいて生成される命令であり、
前記第2制御命令は、前記中立位置から前記第2方向に沿う第2移動範囲における前記操作レバーの位置に基づいて生成される命令であり、
前記動作制限範囲は、前記第1移動範囲に設定される第1動作制限範囲、および、前記第2移動範囲に設定される第2動作制限範囲を含み、
前記第1動作制限範囲の大きさ、および、前記第2動作制限範囲の大きさは、互いに異なるように調整される
請求項6に記載の遠隔操作システム。
【請求項8】
前記処理部は、前記作業機が有する障害物検知部による検知情報を受け付ける処理をさらに実行し、
前記動作制限範囲の大きさは、前記遅延情報と、前記検知情報と、に基づいて調整される
請求項6に記載の遠隔操作システム。
【請求項9】
前記検知情報は、前記作業機と障害物との距離を含み、
前記動作制限範囲の大きさは、前記距離が短いほど拡張される
請求項8に記載の遠隔操作システム。
【請求項10】
前記障害物検知部は、超音波ソナーセンサ、LIDARセンサ、ミリ波センサ、および、撮像装置を含む画像解析部のうちの少なくともいずれか1つを含む
請求項8に記載の遠隔操作システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、遠隔操作システム、遠隔制御装置、方法、およびコンピュータプログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1には、有線接続された操作ボックスを操作することでバックホーを遠隔操作する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平9-60033号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年の無線通信技術の発達に伴い、コンピュータやタブレット等の端末装置と、バックホー等の作業機と、を無線通信によって接続し、遠隔操作することが検討されている。
例えば、端末装置と、作業機と、の無線通信には、無線LANや、移動通信システムを利用することができる。
【0005】
無線通信によって端末装置と、作業機と、を接続する場合、両者の間に通信遅延が発生し、端末装置を操作するオペレータによる操作入力と、操作入力に応じた作業機の作業動作と、の間で時間差が生じることがある。
【0006】
このため、オペレータが操作入力したときに、作業機がオペレータの操作入力に対して遅れて動作することになり、目標位置に対して作業機の位置が行き過ぎてしまう等、精度良く操作できないおそれがあった。
【課題を解決するための手段】
【0007】
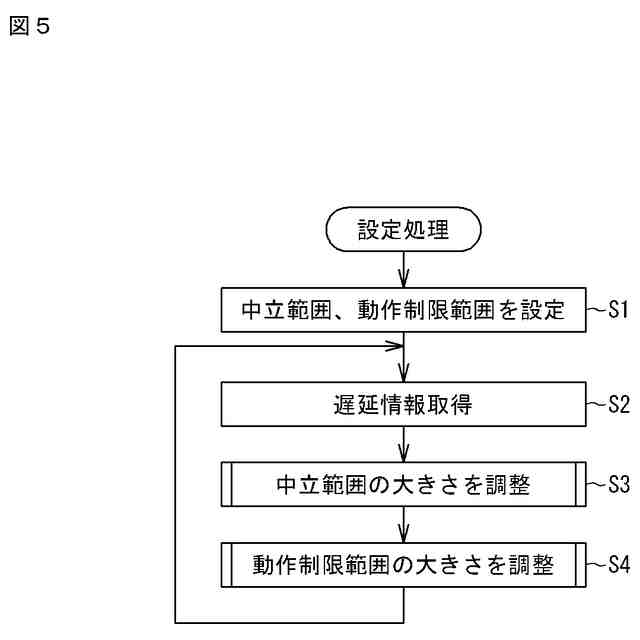
本開示は、作業動作を行う作業機用の遠隔操作システムである。遠隔操作システムは、オペレータの操作入力によって中立位置から最大操作位置までの移動範囲を移動可能な操作レバーと、前記操作レバーの位置に基づいて前記作業動作を行わせるための制御命令を生成し、前記制御命令を前記作業機へ向けて無線送信する遠隔制御装置と、を備える。前記遠隔制御装置は、前記作業機による前記作業動作を制限させる中立範囲を、前記移動範囲のうちの前記中立位置側に設定する設定処理を実行する処理部を備える。前記設定処理は、前記作業機との間の通信遅延を示す遅延情報を取得する処理と、前記遅延情報に基づいて前記中立範囲の大きさを調整する処理と、を含む。
【発明の効果】
【0008】
本開示によれば、操作精度が低下するのを抑制することができる遠隔操作システムを得ることができる。
【図面の簡単な説明】
【0009】
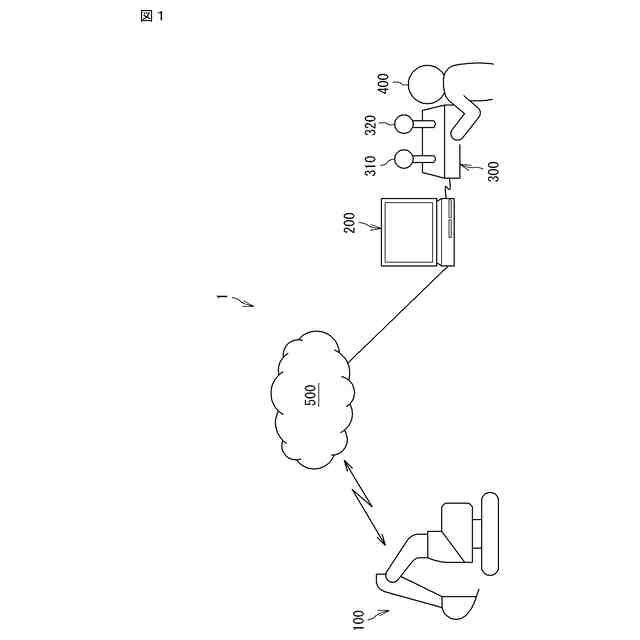
図1は、実施形態に係る遠隔操作システムの全体構成の一例を示す図である。
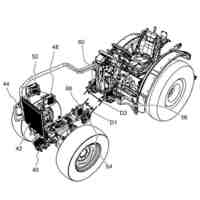
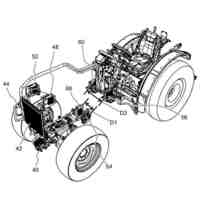
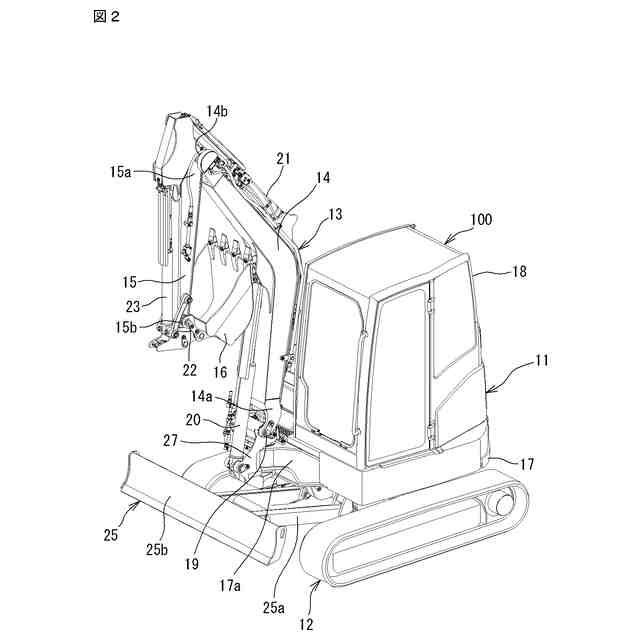
図2は、作業機の一例を示す斜視図である。
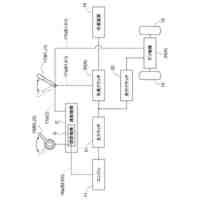
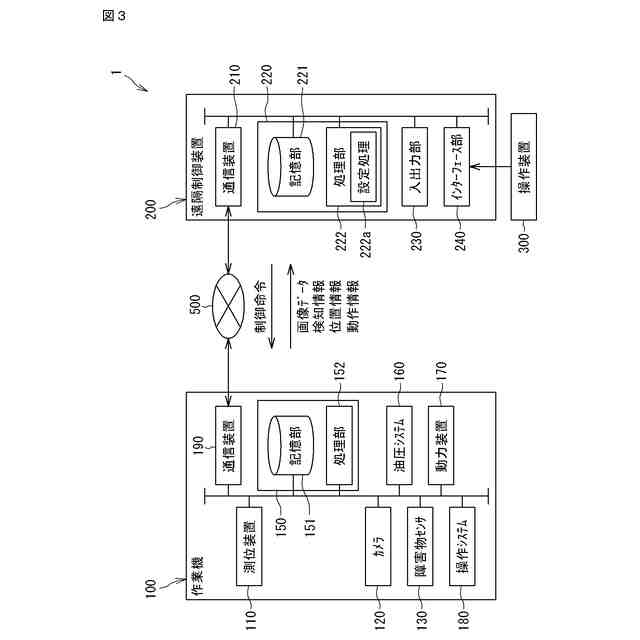
図3は、作業機および遠隔制御装置の構成の一例を示すブロック図である。
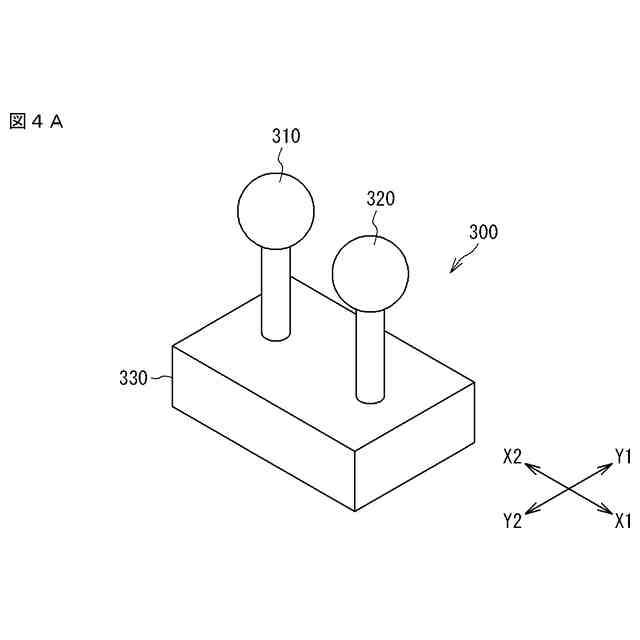
図4Aは、操作装置の外観図である。
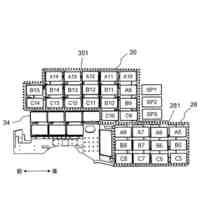
図4Bは、第1操作レバーおよび第2操作レバーの各方向への操作入力に対する作業動作の割り当ての一例を示す図である。
図5は、遠隔制御装置の処理部が行う設定処理の一例を示すフローチャートである。
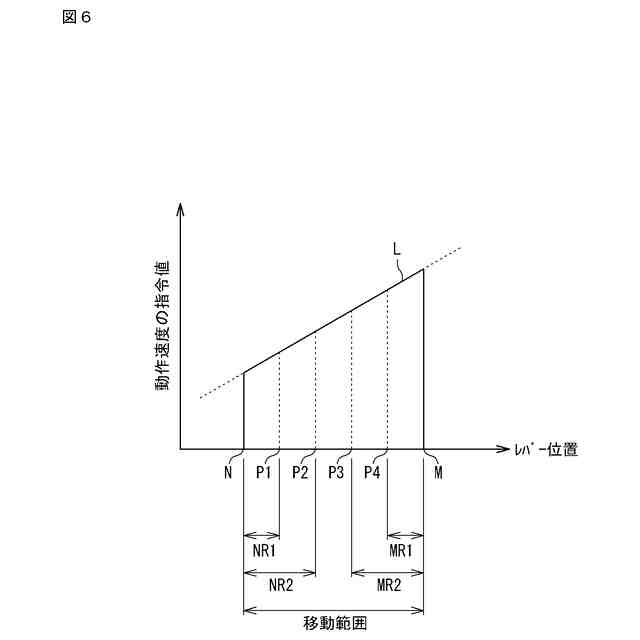
図6は、中立範囲および動作制限範囲を説明するための図である。
図7は、中立位置の大きさを調整する処理の一例を示すフローチャートである。
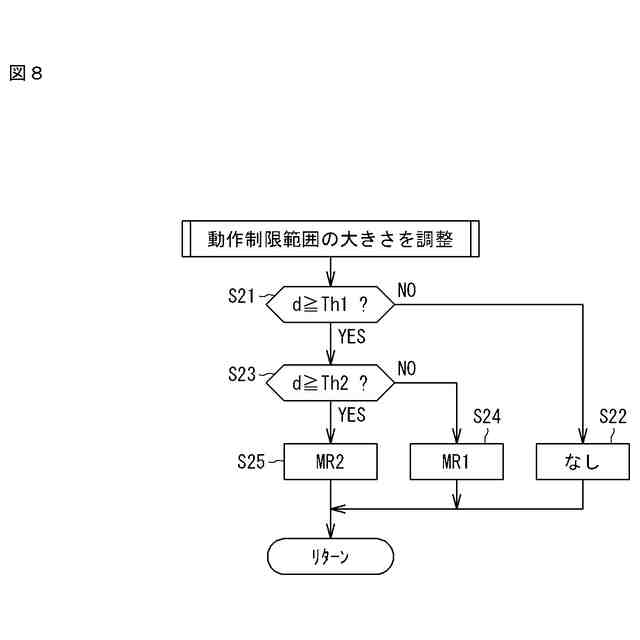
図8は、動作制限範囲の大きさを調整する処理の一例を示すフローチャートである。
図9は、第1操作レバーおよび第2操作レバーの移動範囲のうちの中立範囲を示す図である。
図10Aは、第1操作レバーおよび第2操作レバーの移動範囲のうちの中立範囲および動作制限範囲の一例を示す図である。
図10Bは、第1操作レバーおよび第2操作レバーの移動範囲のうちの中立範囲および動作制限範囲の他の例を示す図である。
図11は、第1変形例における遠隔制御装置によって遠隔操作される作業機100の平面図である。
図12Aは、第1変形例における、第1操作レバーおよび第2操作レバーの移動範囲のうちの中立範囲および動作制限範囲の一例を示す図である。
図12Aは、第1変形例における、第1操作レバーおよび第2操作レバーの移動範囲のうちの中立範囲および動作制限範囲の他の例を示す図である。
図13は、第1変形例における、第1操作レバーおよび第2操作レバーの移動範囲のうちの中立範囲および動作制限範囲のさらに他の例を示す図である。
図14は、第2変形例における遠隔制御装置によって遠隔操作される作業機の側面図である。
図15は、第2変形例における、第1操作レバーおよび第2操作レバーの移動範囲のうちの中立範囲および動作制限範囲の一例を示す図である。
図16は、第2変形例における遠隔制御装置によって遠隔操作される作業機の側面図の他の例である。
図17Aは、第2変形例における、第1操作レバーおよび第2操作レバーの移動範囲のうちの中立範囲および動作制限範囲の他の例を示す図である。
図17Bは、第2変形例における、第1操作レバーおよび第2操作レバーの移動範囲のうちの中立範囲および動作制限範囲のさらに他の例を示す図である。
図18は、作業機を寸動させようとしたときの操作入力であるときの、第1操作レバーおよび第2操作レバーの移動範囲のうちの中立範囲の例を示す図である。
【発明を実施するための形態】
【0010】
最初に実施形態の内容を列記して説明する。
[実施形態の概要]
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
16日前
株式会社クボタケミックス
管継手
3日前
株式会社クボタ
作業車
16日前
株式会社クボタケミックス
配管構造
19日前
株式会社クボタ
水田作業機
8日前
株式会社クボタ
水田作業機
8日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタケミックス
電気融着継手
3日前
株式会社クボタ
歩行型作業機
15日前
株式会社クボタ
歩行型作業機
15日前
株式会社クボタ
歩行型作業機
15日前
株式会社クボタ
歩行型作業機
15日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
歩行型作業機
2日前
株式会社クボタ
歩行型作業機
2日前
株式会社クボタ
歩行型作業機
2日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
株式会社クボタ
電動作業車両
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ