TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025076323
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2024178632
出願日
2024-10-11
発明の名称
人的因子を用いた予測を使用する支援システムおよびコンピュータ実装方法
出願人
本田技研工業株式会社
代理人
弁理士法人クシブチ国際特許事務所
主分類
G08G
1/16 20060101AFI20250508BHJP(信号)
要約
【課題】少なくとも1つの他のエージェントが存在する動的な環境内をエージェントが移動するのを支援するためのコンピュータ実装方法を提供すること。
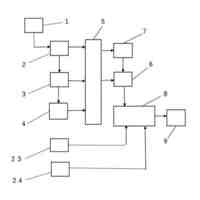
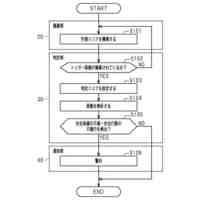
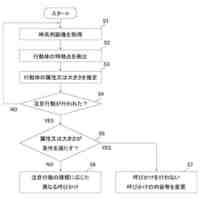
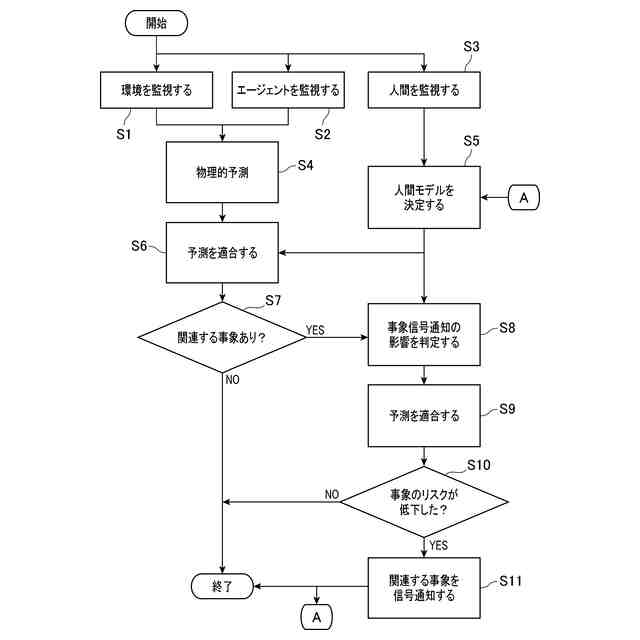
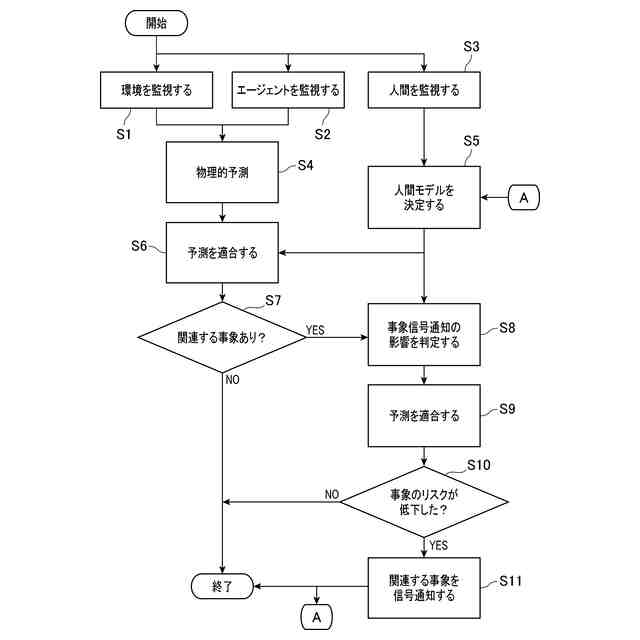
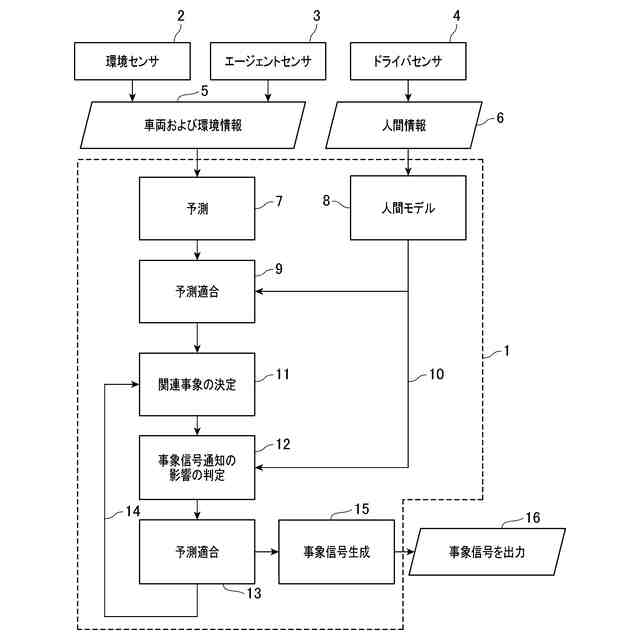
【解決手段】方法は、エージェントの環境に関するセンサ情報を取得するステップと、取得されたセンサ情報に基づいて、エージェントおよび少なくとも1つの他のエージェントのうちの少なくとも一方の少なくとも1つの挙動を予測するステップと、予測される少なくとも1つの挙動に関連する少なくとも1つの人的因子を決定するステップと、決定された人的因子に基づいて、予測される少なくとも1つの挙動を適合するステップと、適合された少なくとも1つの挙動に基づく通信がエージェントまたは全体的な交通目標、例えば安全性、にとって有益であるかどうかを判定するステップと、通信が有益であると判定する場合に、適合された少なくとも1つの挙動に基づいて信号を生成し、生成された信号をエージェントに出力するステップとを含む。
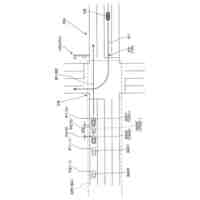
【選択図】図1
特許請求の範囲
【請求項1】
エージェントが動的な環境内で動作するのを支援するためのコンピュータ実装方法であって、少なくとも1つの他のエージェントが前記環境に存在し、前記方法が、
前記エージェントの前記環境に関するセンサ情報を取得するステップと、
前記取得されたセンサ情報に基づいて、前記エージェントおよび前記少なくとも1つの他のエージェントのうちの少なくとも一方の少なくとも1つの挙動を予測するステップと、
前記予測される少なくとも1つの挙動に関連する少なくとも1つの人的因子を決定するステップと、
前記決定された人的因子に基づいて、前記予測される少なくとも1つの挙動を適合するステップと、
前記適合された少なくとも1つの挙動に基づく、前記予測される挙動の帰結と前記予測される挙動のうちの1つとのうちの少なくとも1つの通信が、前記エージェントの動作にとって有益であるかどうかを判定するステップと、
前記通信が有益であると判定する場合に、前記適合された少なくとも1つの挙動に基づいて信号を生成し、前記予測される挙動の前記帰結または前記予測される挙動のうちの少なくとも1つを、前記生成された信号に基づいて前記エージェントに通信するステップと
を含む、方法。
続きを表示(約 1,800 文字)
【請求項2】
前記方法が、
前記適合された少なくとも1つの挙動に基づいて、前記エージェントに関与する少なくとも1つの事象を決定することと、
前記決定された少なくとも1つの事象に関する情報を前記エージェントに信号通知することに伴うリスクを推定することと、
前記決定された少なくとも1つの事象に関する前記情報を前記エージェントに信号通知することに伴う前記推定されるリスクにさらに基づいて、前記適合された挙動を適合することと、
前記決定された少なくとも1つの事象に関する前記情報を前記エージェントに信号通知することに伴う前記推定されるリスクが、前記さらに適合された挙動に基づいて低下するかどうかを判定することと、
前記推定されるリスクが低下したと判定する場合、前記さらに適合された少なくとも1つの挙動に基づいて前記信号を生成し、出力することと
を含む、請求項1に記載のコンピュータ実装方法。
【請求項3】
前記方法が、
少なくとも1つの軌道に関する情報を信号通知することの影響を評価することを含む、前記決定された少なくとも1つの事象に関する前記情報を信号通知することに伴う前記リスクを推定すること
を含む、請求項2に記載のコンピュータ実装方法。
【請求項4】
前記方法が、
前記決定された少なくとも1つの事象に関する前記情報を信号通知することに伴う前記リスクを推定することが、前記信号中で出力される前記情報に対する人間の反応を予測することを含むことと、
前記予測される人間の反応に基づいて前記推定されるリスクの低下を判定する場合、前記情報を含む前記信号の生成および出力を可能にすることと、
前記予測される人間の反応に基づいて前記推定されるリスクの増大を判定する場合、前記情報を含む前記信号の生成および出力を不可能にすることと
を含む、請求項2に記載のコンピュータ実装方法。
【請求項5】
前記決定された少なくとも1つの人的因子が、前記エージェント、前記少なくとも1つの他のエージェント、前記エージェントの前記環境内の他のエージェントのサブセットまたはすべてのうちの少なくとも1つに関する情報を含む、請求項1に記載のコンピュータ実装方法。
【請求項6】
前記方法が、前記決定された人的因子に基づいて、前記エージェント、前記少なくとも1つの他のエージェント、または前記エージェントの前記環境内の前記すべての他のエージェントのうちの少なくとも1つの予測される少なくとも1つの挙動を適合することを含む、請求項1に記載のコンピュータ実装方法。
【請求項7】
前記方法が、前記エージェント、前記少なくとも1つの他のエージェント、または前記エージェントの環境内のすべての他のエージェントのうちの少なくとも1つに、前記決定された少なくとも1つの事象に関する前記情報を信号通知することに伴う前記推定されるリスクにさらに基づいて、前記適合された挙動を適合することを含む、請求項1に記載のコンピュータ実装方法。
【請求項8】
前記方法が、
先行する処理サイクルにおける前記予測される挙動に基づく前記エージェントおよび前記少なくとも1つの他のエージェントのうちの少なくとも一方の判定された反応に基づいて、人間モデルを更新すること
を含む、請求項1に記載のコンピュータ実装方法。
【請求項9】
前記方法が、
前記人的因子の確実性に基づいて前記人的因子に関連する重みを決定し、前記決定された重みに基づいて前記予測される挙動に対する前記人的因子の影響を判定すること
を含む、請求項1に記載のコンピュータ実装方法。
【請求項10】
前記方法が、
前記予測される少なくとも1つの挙動に関連する少なくとも1つの人的因子を決定することが、前記エージェントに関連する人的因子情報と前記少なくとも1つの他のエージェントに関連する人的因子情報とを組み合わせて判定して、前記少なくとも1つの人的因子に関連する総合不確実性を決定することを含むこと
を含む、請求項1に記載のコンピュータ実装方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動エージェントの将来の挙動の予測に基づく、動的な環境における支援システムの一般分野に関する。詳細には、エージェントが動的な環境で動作するのを支援するためのコンピュータ実装方法が提案される。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
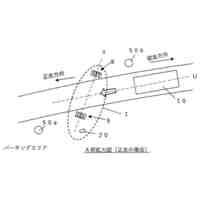
道路交通環境における自動化されたドライバ支援の分野は、移動エージェントが、複数の他のモバイルエージェントが存在する非常に動的な環境内で支援システムの支援を受けて移動する、特定の応用分野に相当する。
【0003】
エージェントは、これらに限定されないが、歩行者、自転車運転者、オートバイ運転者、動力車両、例えば道路交通環境の交通シナリオにおける車、トラックおよびバスを含む、交通関係者であり得る。
【0004】
動的に変化するシナリオで移動するエージェントの他の例は、空中車両、例えば、空域環境内を移動する有人航空機、ヘリコプター、無人空中車両、または海洋環境の水上車両を含む。
【0005】
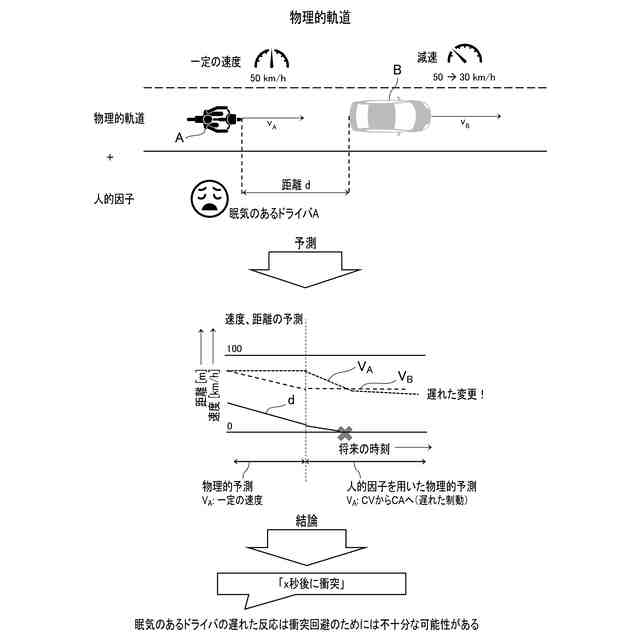
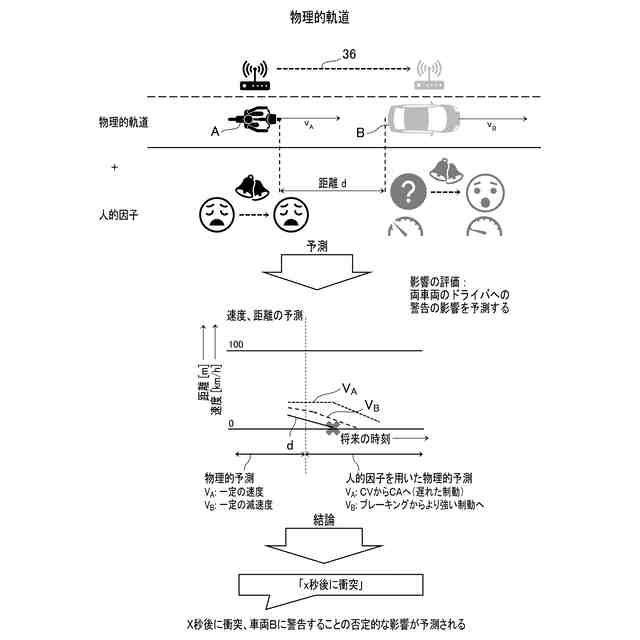
道路交通環境の現在の先進ドライバ支援システムは、ドライバ支援システムの支援を受けて自律的に動作する車両(自車両)の環境内にいる他車両の将来の挙動の予測を使用する。例えば特許、米国特許第8,903,588(B2)号では、開示される運転支援システムは、自車両の環境を物理的に感知する少なくとも1つのセンサによって取得されたセンサデータに基づいて、対象物体の将来の移動挙動を予測する。同システムは、センサによって感知された自車両の環境内でのエージェントの複数の移動挙動選択肢を算出する。コンテクストに基づく予測ステップで、システムは分類器の組を使用し、各分類器は、感知されたエージェントがある時刻にある移動挙動を実行する確率を推定する。システムは、物理的予測を使用して、測定された地点を状況モデルの軌道と比較することによって移動挙動選択肢を検証し、エージェントの少なくとも1つの将来の挙動を示す少なくとも1つの軌道を決定する。システムは、決定された少なくとも1つの軌道に基づいてエージェントの少なくとも1つの将来の位置を推定し、自車両の自律走行の運転作動を行うため、または例えば警告信号などの信号を出力することによって自車両のドライバを支援するための基礎として、推定された将来の位置を表す情報を出力してもよい。
【0006】
ドライバ支援システムはアダプティブ・クルーズ・コントロール・システム(ACC)を含むことがあり、これは、自車両のドライバによって設定された速度と、自車両から他車両までの感知された距離と、他車両それぞれの速度とに基づいて、自車両の前後方向制御を行う。
【0007】
それでも、知られているACCシステムは、特に各種車両を操作する人間ドライバまたは徒歩で移動する人が依然として支配的である道路交通環境内で、様々なドライバの個性に対処する能力を欠いている。ACCに関して、人間ドライバは、各人の個人的な性質および精神状態に応じて異なる反応をすることがあり、変化する状況に対して早期に反応することもあれば、遅く反応することもある。人間ドライバは、自車両の前方に割り込むまたは前方から出ていく突然の車線変更として動作を行うことがあり、それにより、自車両と他車両の間の安全距離を急に変えることがある。
【0008】
一般に、現在のドライバ支援システムは、ドライバの状態を考慮することができず、警告エラー、またはアクセル、ブレーキ、もしくは車両操縦制御の不十分な作動を引き起こすことがある。
【0009】
欧州特許EP1544070B1は、複数の仮想オペレータを提供することにより、信頼度指標を用いてドライバの意図を推定する能力をもつドライバ支援システムを開示している。推定されたドライバの意図は、リスク値またはリスク値に基づいて生成される他の出力を変更するために使用される。EP1544070B1は、車線変更のシナリオで他車両の離散的な横方向挙動の予測を提供し、他車両が車線変更を実行するかそれとも車線変更を実行しないかを判定する。EP1544070B1の改良された支援は、推定されるドライバの意図に基づいて自車両のアクセルペダルまたは制動システムの作動を変更することを含み、ドライバの警告やリスク通信のシナリオは考慮しない。
【発明の概要】
【課題を解決するための手段】
【0010】
独立請求項1に係るコンピュータ実装方法は、これらの問題およびさらに他の問題に好適に対処する。従属請求項は、さらなる好適な実施形態を定める。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
1か月前
個人
自動車ケアフル灯
1か月前
能美防災株式会社
発信機
1か月前
ニッタン株式会社
発信機
23日前
ニッタン株式会社
発信機
23日前
個人
逆走・正走車両検出システム
1か月前
日本信号株式会社
情報提供システム
1か月前
アズビル株式会社
建物管理システム
2日前
ホーチキ株式会社
異常報知設備
23日前
ホーチキ株式会社
異常報知設備
14日前
個人
磁気・光学誘導路線による車両の運行制御
28日前
タック株式会社
安全監視システム
2か月前
ホーチキ株式会社
非常通報システム
17日前
三菱ロジスネクスト株式会社
搬送システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
株式会社アジラ
注目行動呼びかけシステム
1か月前
トヨタ自動車株式会社
配車システム
27日前
株式会社フィットネスワン
見守りシステム
21日前
Adora株式会社
アプリ使用制御システム
13日前
シャープ株式会社
駐車場管理装置
10日前
能美防災株式会社
非常報知システム
1か月前
東亜電子工業株式会社
警報コントローラ
1か月前
トヨタ自動車株式会社
車両
1か月前
株式会社エイビット
工事観測システム
今日
株式会社アドヴィックス
走行支援システム
15日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
運転支援装置
24日前
矢崎総業株式会社
路面監視装置
1か月前
愛知時計電機株式会社
生活データ集計装置
1か月前
パナソニックIPマネジメント株式会社
火災警報器
1か月前
株式会社アイシン
重畳画像表示装置
22日前
株式会社アイシン
重畳画像表示装置
22日前
日本信号株式会社
情報提供システム及び情報提供方法
7日前
トヨタ自動車株式会社
情報機器
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ