TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025069330
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2025016255,2023518540
出願日
2025-02-03,2021-09-21
発明の名称
多軸ポジショナ
出願人
3エスエーイー テクノロジーズ インク
代理人
弁理士法人YKI国際特許事務所
主分類
G12B
5/00 20060101AFI20250422BHJP(器械の細部)
要約
【課題】ヘキサポッドの代替となる正確な位置決めマニピュレータが望まれる。
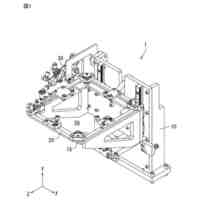
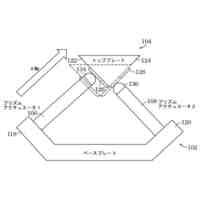
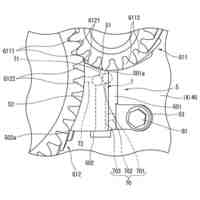
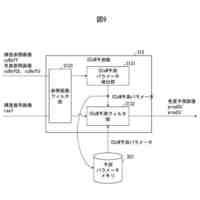
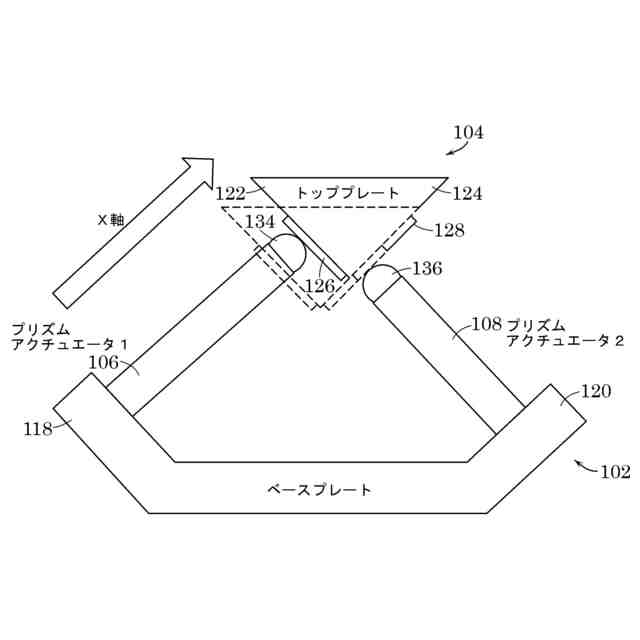
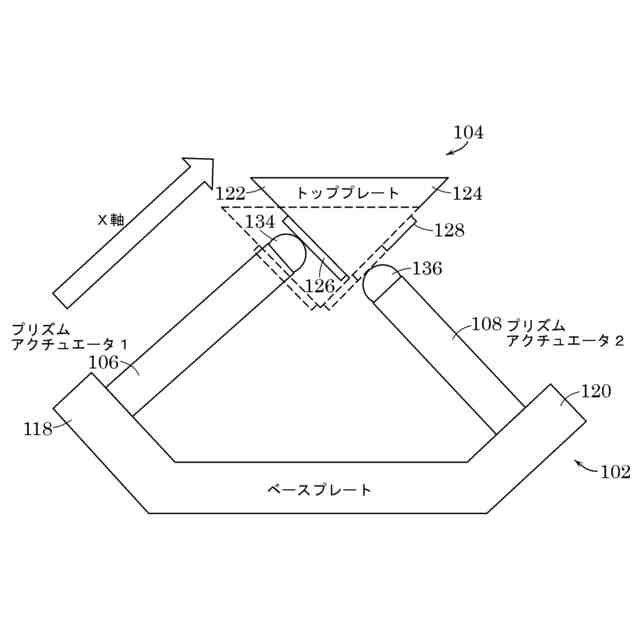
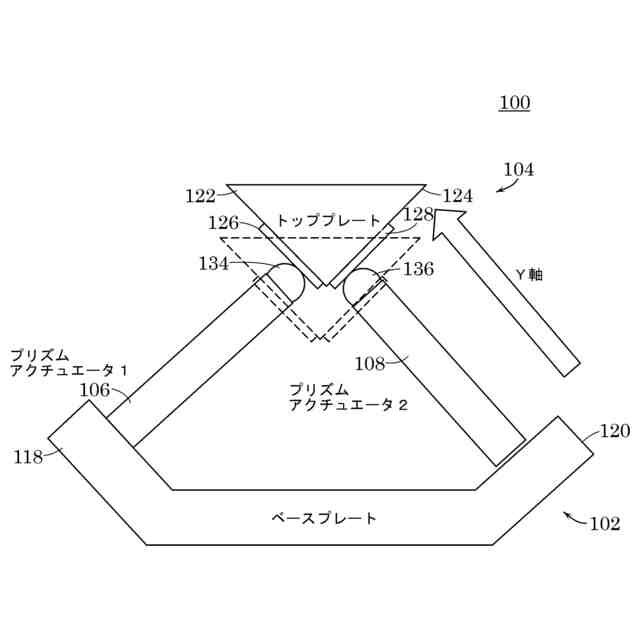
【解決手段】多軸位置決めステージまたはポジショナは、複数のプリズムジョイントアクチュエータによって支持されて操作可能なトッププレート104を含む。各アクチュエータは、トッププレート104との4または5自由度(DOF)を有するアクチュエータジョイントを含む。アクチュエータの1つ以上が伸長または収縮すると、残りのアクチュエータの回動点、または4もしくは5DOFアクチュエータジョイントがシフトしてトッププレート104を動かすことができる。アクチュエータは、少なくとも1つのベースプレート102またはベース構造体の間に配置されてそこに固定され得る。
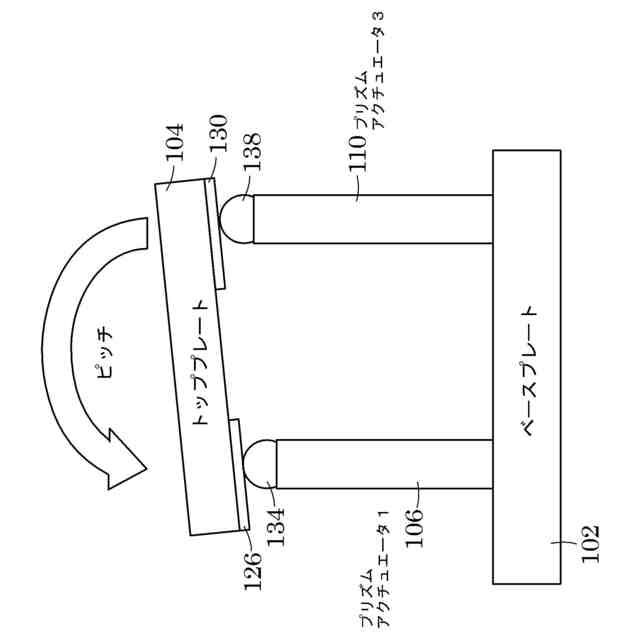
【選択図】図3
特許請求の範囲
【請求項1】
物体を好ましい位置に維持するように構成される溝またはチャネルを有する構造体(304)と、
少なくとも1つのベース(302)と、
前記少なくとも1つのベース上にわたって前記構造体を支持し、1つ以上のアクチュエータの伸長または収縮に応じて前記少なくとも1つのベースに対して前記構造体を移動させるように構成される複数のアクチュエータ(306、308、310、312)であって、前記構造体を傾けて回転させるように構成される複数のアクチュエータ(306、308、310、312)と、
を備え、
3つ以上の前記アクチュエータは、少なくとも4自由度(DOF)を有するジョイントを介して前記構造体との接触を維持するスライダを備える端部を含むことを特徴とするポジショナ(300)。
続きを表示(約 890 文字)
【請求項2】
請求項1に記載のポジショナであって、前記3つ以上のアクチュエータは、5DOFを有するジョイントを介して前記構造体との接触を維持する少なくとも2つのアクチュエータを含むことを特徴とするポジショナ。
【請求項3】
請求項2に記載のポジショナであって、前記3つ以上のアクチュエータは、4DOFを有するジョイントを介して前記構造体との接触を維持する少なくとも2つのアクチュエータを含むことを特徴とするポジショナ。
【請求項4】
請求項1に記載のポジショナであって、前記3つ以上のアクチュエータは、4DOFを有するジョイントを介して前記構造体との接触を維持する少なくとも2つのアクチュエータを含むことを特徴とするポジショナ。
【請求項5】
請求項1に記載のポジショナであって、4DOFを有する少なくとも1つのジョイントが磁気ジョイントであることを特徴とするポジショナ。
【請求項6】
請求項1に記載のポジショナであって、5DOFを有する少なくとも1つのジョイントが磁気ジョイントであることを特徴とするポジショナ。
【請求項7】
請求項1に記載のポジショナであって、前記3つ以上のアクチュエータの端部に設けられたスライダのそれぞれが、前記構造体との磁気ジョイントを有することを特徴とするポジショナ。
【請求項8】
請求項1に記載のポジショナであって、前記構造体との4DOFジョイントを有するアクチュエータは、前記構造体と接触する円柱状の端部を有することを特徴とするポジショナ。
【請求項9】
請求項1に記載のポジショナであって、前記構造体との5DOFジョイントを有するアクチュエータは、前記構造体と接触する半球状の端部を有することを特徴とするポジショナ。
【請求項10】
請求項1に記載のポジショナであって、前記構造体は、長手方向に延びる溝、くぼみ、またはチャネルを含むことを特徴とするポジショナ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の概念は、位置決めステージに関し、特に、多軸相対位置決めステージに関する。
続きを表示(約 4,000 文字)
【背景技術】
【0002】
関連出願
本出願は、2020年9月23日に出願されて多軸ポジショナと題される米国特許出願第17/029,908号の利益を主張し、この米国特許出願第17/029,908号は、2020年7月16日に出願されて多軸ポジショナと題される米国特許出願第16/930,638号の一部継続出願であり、米国特許出願第16/930,638号は、2019年2月14日に出願されて多軸位置決め方法と題される、現在米国特許第10,746,928号である米国特許出願第16/275,601号の継続出願であり、米国特許第10,746,928号は、2017年9月29日に出願されて多軸相対位置決めステージと題される、現在米国特許第10,429,587号である米国特許出願第15/720,006号の分割出願であり、米国特許第10,429,587号は、2016年9月30日に出願されて多軸相対位置決めステージと題される米国仮出願第62/402,674号の利益を主張し、これらの出願のそれぞれは、引用によりその全体が本願に組み入れられる。
【0003】
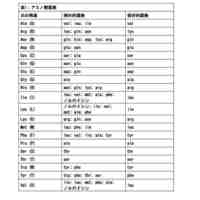
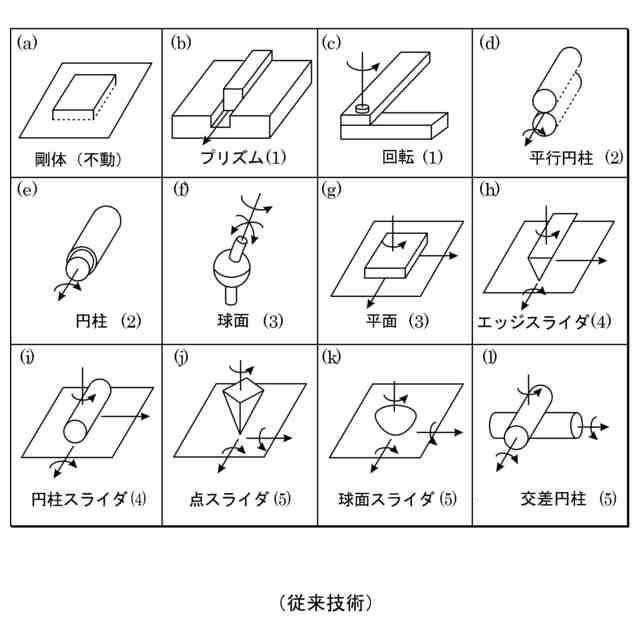
位置マニピュレータは、様々な精度で物体、ツール、または器具を位置決めするために、膨大な数の用途で使用される。剛体(不動)、プリズム、回転、平行円柱、円柱、球面、平面、エッジスライダ、円柱スライダ、点スライダ、球面スライダ、および交差円柱を含む、位置マニピュレータで使用され得るキネマティックジョイント、またはキネマティックペアの概要が図1に示される。
【0004】
スチュワートプラットフォーム(本明細書ではヘキサポッドとも呼ばれる)は、例えば、各アクチュエータの両端に球状、ボール、またはユニバーサルジョイントを伴う6つのアクチュエータから構成される多軸位置決めステージである。ヘキサポッドは、殆どの用途で世界クラスの多軸位置決めステージ形態と見なされるが、多くの場合、法外なコストがかかる。ヘキサポッドの1つの問題は、それがアクチュエータどうしの相互作用による相乗的なモーションプラットフォームだということである。すなわち、アクチュエータどうしの相互作用により、どのアクチュエータも独立して動かすことはできず、所与の移動では、アクチュエータの多くまたは全てが、ステージが拘束されるのを防ぐために、異なる特定の量をかつ異なる速度プロファイルで移動する必要がある。更に、これらの動きと速度のプロファイルは、所定の開始点と終了点が変更されると、連続的に変化する。このため、短距離の単軸移動が必要な場合でも、各アクチュエータがステージのトッププレートをポイントAからポイントBに到達させるために必要な移動距離と速度プロファイルを個別に計算するには、非常に複雑なコンピュータアルゴリズムが必要である。その結果、人間のオペレータは、この単純な動きでさえ、ステージを拘束せずに手動で実行することはできない。
【0005】
ヘキサポッドに伴う他の重大な欠点は、ジョイントの剛性(軸外動作に対する)が「スロップ」または「遊び」を決定し、したがってステージの分解能を決定することである。益々厳しい公差で球状ジョイント(ヘキサポッドで採用される)を形成することは指数関数的に困難になるため、これは設計上の矛盾である。すなわち、設計者が世界クラスの球面ベアリングを形成してステージの分解能を最大化し、傾斜を最小限に抑える場合、デフォルトで2つの固有の問題が悪化する。第1に、球面ジョイントの剛性により、拘束を防止するために、各アクチュエータの動作および速度プロファイル要件の精度が指数関数的に向上する。第2に、必要な正確な動作と速度プロファイルを実現するために、アクチュエータの機能要件が指数関数的に増大する。その結果、ヘキサポッドの分解能を向上させるには、動きと速度のプロファイルを決定するための計算能力の指数関数的な増大、アクチュエータの性能能力の指数関数的な増大、および12個の高品質球面ベアリングが必要である。これら全ての要因により、ヘキサポッドのコストが大幅に上昇する。
【0006】
ヘキサポッドは、一般に、対応するキネマティックチェーンの3倍~10倍の費用がかかるが、公差スタックアップの問題に悩まされないため、しばしば好まれる。10ミクロンの精度は、多くの用途でポジショナの要件として珍しくはなく、例えば、フォトニクス業界では、サブミクロンの精度が必要になることがよくある。現在、ヘキサポッドの価格は、一般に、物理的なサイズ、負荷制限、および精度のそれぞれの要件に応じて、60,000ドルから120,000ドルを超える。別の正確な位置マニピュレータが非常に望ましい。
【発明の概要】
【課題を解決するための手段】
【0007】
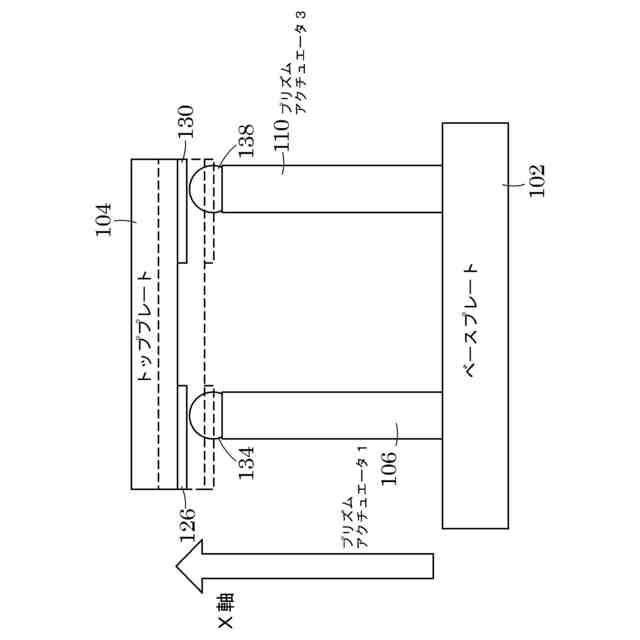
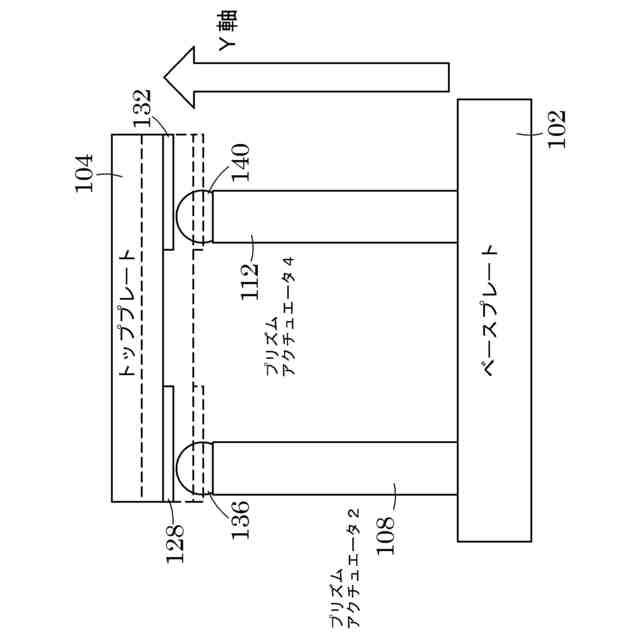
本発明の概念の原理によれば、平行位置マニピュレータは、トッププレート、ベースプレート(本明細書ではボトムプレートまたはベースプレートとも呼ばれる)、および3つ、4つ、5つ、または6つのプリズムジョイントアクチュエータを含む。各アクチュエータは、ベースプレートまたはトッププレートのいずれかに5自由度(DOF)を持つアクチュエータジョイントを含む。動作時、アクチュエータの1つ以上が伸長または収縮すると、残りのアクチュエータの回動点、例えば5DOFアクチュエータジョイントがそのアクチュエータの動作軸(すなわち、アクチュエータの伸長および収縮によって規定される軸)以外の任意の軸でシフトできる。例示的な実施形態では、磁力、重力、および/またはシリコーンなどの柔軟なポリマーを使用して、プリズムアクチュエータが伸長または収縮するときに最大5つのDOF回動点を接触領域内のそれぞれの(すなわち、トップまたはボトム)プレートと接触させ続けることができる。例示的な実施形態では、プリズムアクチュエータのうちの少なくとも2つは、少なくとも2つの他のプリズムアクチュエータに対して垂直である。第5の軸が追加されると、その関連するプリズムアクチュエータは、他の4つのプリズムアクチュエータに対して垂直に配置される。
【0008】
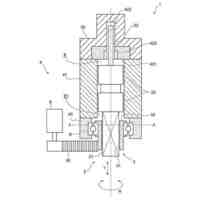
例示的な実施形態では、アクチュエータは、圧電アクチュエータ、手動マイクロメータねじ、磁気アクチュエータ、リニアアクチュエータを伴うステッピングモータ(一体型または別個のいずれか)、油圧シリンダ、空気圧シリンダ、または例えば、偏心カムを伴う移転モータなどの幾つかのタイプのうちのいずれかであってもよい。本発明の概念の原理に係る例示的な実施形態では、平行位置マニピュレータは、各アクチュエータによって及ぼされる押し引き力が、組み合わされた他の全てのアクチュエータの剪断摩擦よりも大きくなるように構成される。例示的な実施形態では、これは、保持力は高いが剪断力は低い材料、例えば、硬質で平坦な金属表面と磁気的に接触して保持される硬質金属の球状表面などを使用することによって達成される。そのような実施形態では、側面の一方のみ(すなわち、硬質金属の球状表面または硬質で平坦な金属表面のいずれか)が磁化される。これは、両側面が磁性体の場合、それらが、スライド軸で半拘束され、したがって球状の3DOFジョイントのように振る舞うからである。
【0009】
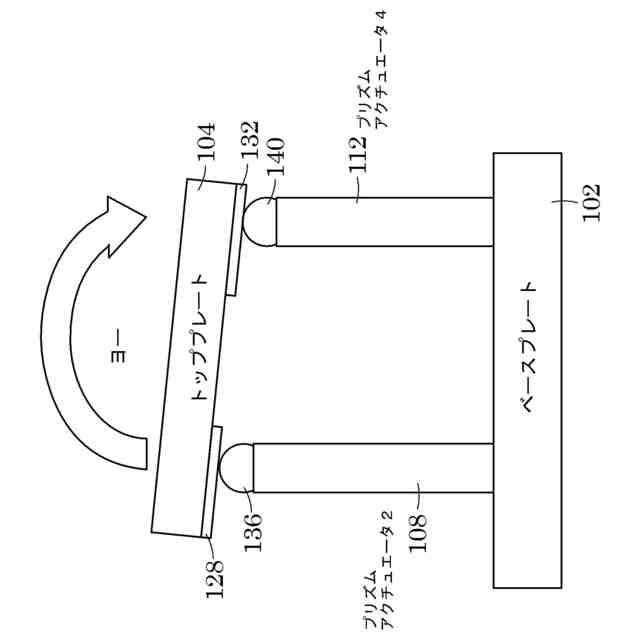
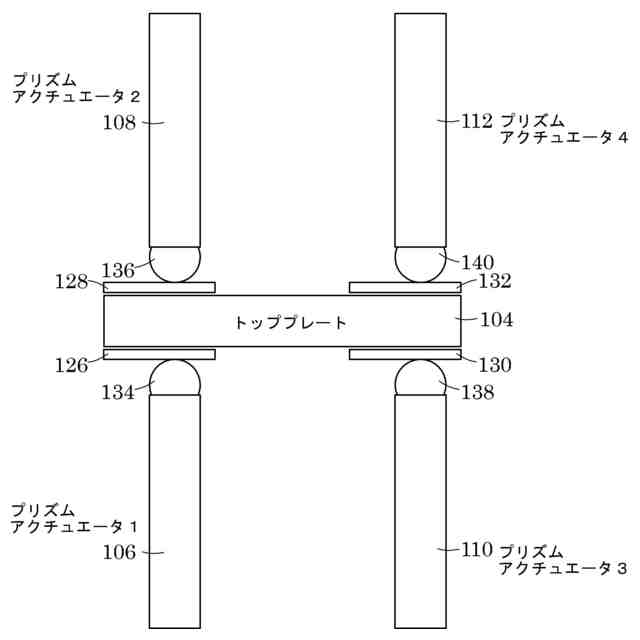
本発明の概念の原理によれば、位置決めステージは、複数の磁気プリズムジョイントアクチュエータ、ベースプレート、およびトッププレートを含む。トッププレートは、装置を正確に位置決めするために装置を支持することができる。トッププレートは、複数の磁気プリズムジョイントアクチュエータによって支持されてもよく、これらの磁気プリズムジョイントアクチュエータは、更には、ベースプレートによって支持される。例示的な実施形態において、各アクチュエータは、垂直軸または平面に対してある角度で各アクチュエータを位置決めするベースプレートの一部分に固定される。例示的な実施形態では、角度が45度であり、これにより、アクチュエータがベースプレートの反対側の端部またはエンドピースに互いに90度に位置決めされる。例示的な実施形態において、トッププレートの側面は、垂直軸または平面に対してベースプレートの側面と同じ角度で形成されるが、他の形態が本発明の概念の範囲内で考えられる。トッププレートの傾斜側面に磁石が設けられる。各アクチュエータは、その遠位端に、例えば鉄金属であってもよい磁性材料を含む。例示的な実施形態では、磁性材料が半球の形状であるが、本発明の概念の範囲内で他の形状および組合せが考えられる。好ましい実施形態では、各磁性材料の端部は、トッププレートの側面で磁石と接触するように構成され、それによってベースプレートの上にトッププレートを支持する。
【0010】
動作時、アクチュエータの遠位端は、磁石の力によってトッププレートの側面にある磁石と接触して保持される。アクチュエータが作動する(すなわち、伸長または収縮する)と、トッププレートは、アクチュエータの動きによって決定される動作方向に直線的に移動する。トッププレートの反対側で磁石と接触しているアクチュエータの遠位端は、アクチュエータの遠位端の磁性材料に作用する磁石の磁力によって、磁石と接触したままである。同時に、このアクチュエータの遠位端により、作動されたアクチュエータの動きによって決定される方向に磁石(およびトッププレート)をスライドさせることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
CKD株式会社
傾き調整装置
1か月前
株式会社村田製作所
位置調整装置
25日前
ミラティ セラピューティクス, インコーポレイテッド
KRAS G12D阻害剤
20日前
住友重機械工業株式会社
駆動装置、位置決め装置
2か月前
アムジエン・インコーポレーテツド
がん治療のためのKRASG12C阻害剤及び1種以上の薬学的に活性な追加の薬剤を含む併用療法
25日前
3エスエーイー テクノロジーズ インク
多軸ポジショナ
5日前
ソフトバンクグループ株式会社
システム
28日前
日産自動車株式会社
ギヤ式動力伝達装置
4日前
モレキュラー テクノロジーズ ラボラトリーズ エルエルシー
PEG化された成長ホルモンアンタゴニスト
2か月前
株式会社サンセイアールアンドディ
遊技機
3か月前
ザ トラスティーズ オブ ザ ユニバーシティ オブ ペンシルバニア
変異型RASを標的とするための組成物および方法
24日前
京セラドキュメントソリューションズ株式会社
GUIアプリケーション作成支援装置、GUIアプリケーション作成支援方法及びプログラム
3か月前
エフ・ホフマン-ラ・ロシュ・アクチェンゲゼルシャフト
縮合環化合物
2か月前
トーマス ヨット.ツェー. マッツェン ゲーエムベーハー
年齢を決定するための方法およびデバイス
3か月前
モデルナティエックス インコーポレイテッド
RNAがんワクチン
3日前
クラ オンコロジー, インコーポレイテッド
ファルネシルトランスフェラーゼ阻害剤による扁平上皮癌の治療方法
3日前
ピーティーシー セラピューティクス, インコーポレイテッド
膵臓癌を治療する方法
1か月前
シャープ株式会社
動画像復号装置および動画像符号化装置
27日前
ザ・チルドレンズ・ホスピタル・オブ・フィラデルフィア
リンパ系疾患の診断および治療のための組成物および方法
2か月前
株式会社日立製作所
遺伝子変異の定量分析方法、定量分析装置、及び定量分析キット
3か月前
ザ ロックフェラー ユニバーシティー
ヒト免疫不全ウイルスを無毒化する抗体、およびその使用方法
24日前
リペア セラピューティクス インコーポレイテッド
ATRキナーゼ阻害剤としての置換2-モルホリノピリジン誘導体
25日前
株式会社三共
遊技機
24日前
株式会社三共
遊技機
24日前
株式会社三共
遊技機
24日前
アイバイオ, インク.
操作されたCD25ポリペプチドおよびその使用
2か月前
株式会社三共
遊技機
2か月前
株式会社三共
遊技機
1か月前
株式会社三共
遊技機
2か月前
武田薬品工業株式会社
血漿カリクレイン結合タンパク質
2か月前
レボリューション メディシンズ インコーポレイテッド
協同的結合に関与する化合物及びその使用
1か月前
メモリアル スローン ケタリング キャンサー センター
A33抗体組成物および放射性免疫療法におけるその使用方法
24日前
他の特許を見る

 特許ウォッチ
特許ウォッチ