TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025068661
公報種別
公開特許公報(A)
公開日
2025-04-30
出願番号
2023178590
出願日
2023-10-17
発明の名称
経路生成装置、経路生成方法およびプログラム
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01C
21/26 20060101AFI20250422BHJP(測定;試験)
要約
【課題】経路生成のロバスト性を向上させることができる経路生成装置、経路生成方法およびプログラムを提供する。
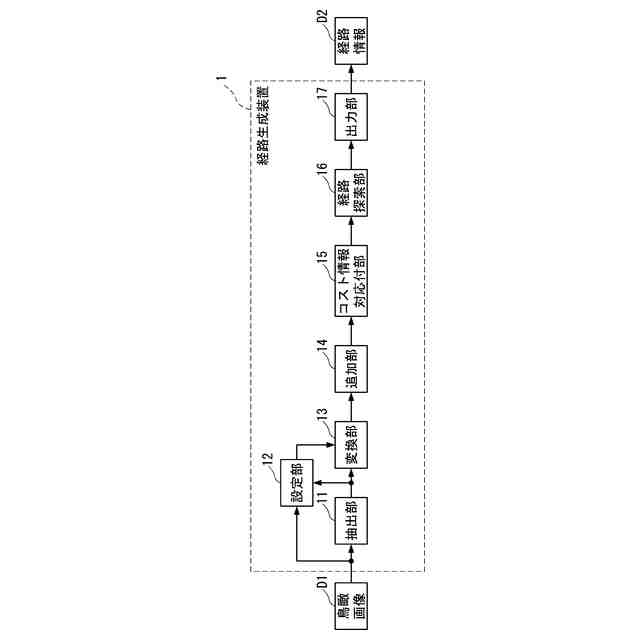
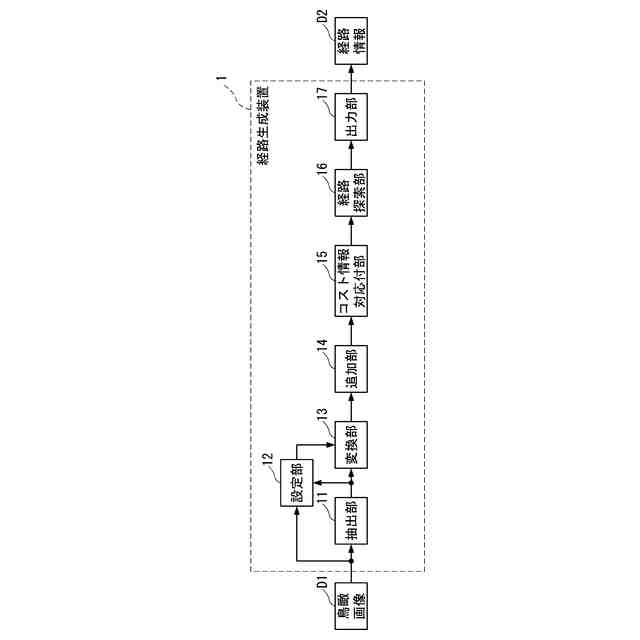
【解決手段】経路生成装置は、鳥瞰画像から道路領域を抽出する抽出部と、鳥瞰画像に対して走行可能領域を設定する設定部と、抽出された道路領域と設定された走行可能領域とを統合してグラフ構造に変換する変換部と、グラフ構造に経路の始点に対応する始点ノードと経路の終点に対応する終点ノードとを追加する追加部と、始点ノードと終点ノードとが追加されたグラフ構造に基づき始点から終点までの最適経路を探索する経路探索部と、最適経路を出力する出力部と、を備える。
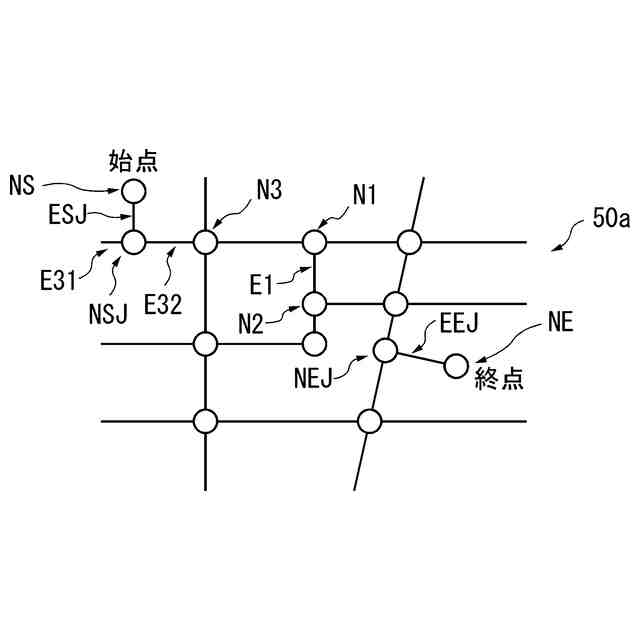
【選択図】図1
特許請求の範囲
【請求項1】
鳥瞰画像から道路領域を抽出する抽出部と、
前記鳥瞰画像に対して走行可能領域を設定する設定部と、
抽出された前記道路領域と設定された前記走行可能領域とを統合してグラフ構造に変換する変換部と、
前記グラフ構造に経路の始点に対応する始点ノードと前記経路の終点に対応する終点ノードとを追加する追加部と、
前記始点ノードと前記終点ノードとが追加された前記グラフ構造に基づき前記始点から前記終点までの最適経路を探索する経路探索部と、
前記最適経路を出力する出力部と、
を備える経路生成装置。
続きを表示(約 840 文字)
【請求項2】
前記出力部は、前記最適経路を離散した複数のウェイポイントの集合として出力する
請求項1に記載の経路生成装置。
【請求項3】
地理情報に基づくコスト情報を前記グラフ構造に対応付けるコスト情報対応付部をさらに備え、
前記経路探索部は、前記コスト情報を考慮して、前記最適経路を探索する
請求項2に記載の経路生成装置。
【請求項4】
前記設定部は、前記道路領域を重畳表示した状態の前記鳥瞰画像に対して前記走行可能領域を設定する
請求項3に記載の経路生成装置。
【請求項5】
鳥瞰画像から道路領域を抽出するステップと、
前記鳥瞰画像に対して走行可能領域を設定するステップと、
抽出された前記道路領域と設定された前記走行可能領域とを統合してグラフ構造に変換するステップと、
前記グラフ構造に経路の始点に対応する始点ノードと前記経路の終点に対応する終点ノードとを追加するステップと、
前記始点ノードと前記終点ノードとが追加された前記グラフ構造に基づき前記始点から前記終点までの最適経路を探索するステップと、
前記最適経路を出力するステップと、
を含む経路生成方法。
【請求項6】
鳥瞰画像から道路領域を抽出するステップと、
前記鳥瞰画像に対して走行可能領域を設定するステップと、
抽出された前記道路領域と設定された前記走行可能領域とを統合してグラフ構造に変換するステップと、
前記グラフ構造に経路の始点に対応する始点ノードと前記経路の終点に対応する終点ノードとを追加するステップと、
前記始点ノードと前記終点ノードとが追加された前記グラフ構造に基づき前記始点から前記終点までの最適経路を探索するステップと、
前記最適経路を出力するステップと、
をコンピュータに実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、経路生成装置、経路生成方法およびプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、セマンティックセグメンテーションという機械学習の技術を用いて鳥瞰画像から抽出した道路領域を、地図情報の道路区間を覆うように補正する技術が開示されている。特許文献1に記載されている技術は、例えば、車両の自動運転制御に利用されるいわゆる高精度地図情報を生成するために用いることができるとされている。また、補正のために用いる地図情報は、例えば、ナビゲーション装置において目的地までのルート探索のために使用される地図情報とすることができるとされている。
【先行技術文献】
【特許文献】
【0003】
特許第7207359号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述したような地図情報を用いたルート探索では、通常、道路領域を探索対象として最適経路等が探索される。この場合、例えば、災害等が発生し、一部の道路領域が使用できなくなった場合には、ルート探索を行うことができなくなる場合があるという課題がある。
【0005】
本開示は、上記課題を解決するためになされたものであって、経路生成のロバスト性を向上させることができる経路生成装置、経路生成方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本開示に係る経路生成装置は、鳥瞰画像から道路領域を抽出する抽出部と、前記鳥瞰画像に対して走行可能領域を設定する設定部と、抽出された前記道路領域と設定された前記走行可能領域とを統合してグラフ構造に変換する変換部と、前記グラフ構造に経路の始点に対応する始点ノードと前記経路の終点に対応する終点ノードとを追加する追加部と、前記始点ノードと前記終点ノードとが追加された前記グラフ構造に基づき前記始点から前記終点までの最適経路を探索する経路探索部と、前記最適経路を出力する出力部と、を備える。
【0007】
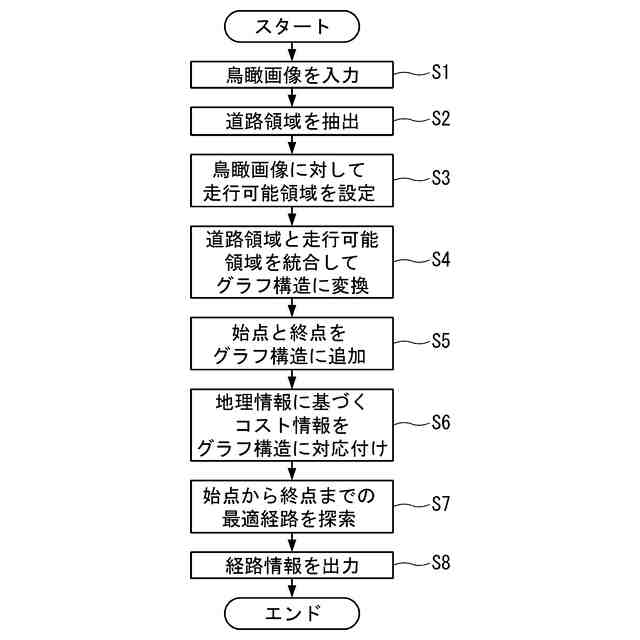
本開示に係る経路生成方法は、鳥瞰画像から道路領域を抽出するステップと、前記鳥瞰画像に対して走行可能領域を設定するステップと、抽出された前記道路領域と設定された前記走行可能領域とを統合してグラフ構造に変換するステップと、前記グラフ構造に経路の始点に対応する始点ノードと前記経路の終点に対応する終点ノードとを追加するステップと、前記始点ノードと前記終点ノードとが追加された前記グラフ構造に基づき前記始点から前記終点までの最適経路を探索するステップと、前記最適経路を出力するステップと、を含む。
【0008】
本開示に係るプログラムは、鳥瞰画像から道路領域を抽出するステップと、前記鳥瞰画像に対して走行可能領域を設定するステップと、抽出された前記道路領域と設定された前記走行可能領域とを統合してグラフ構造に変換するステップと、前記グラフ構造に経路の始点に対応する始点ノードと前記経路の終点に対応する終点ノードとを追加するステップと、前記始点ノードと前記終点ノードとが追加された前記グラフ構造に基づき前記始点から前記終点までの最適経路を探索するステップと、前記最適経路を出力するステップと、をコンピュータに実行させる。
【発明の効果】
【0009】
本開示の経路生成装置、経路生成方法およびプログラムによれば、経路生成のロバスト性を向上させることができる。
【図面の簡単な説明】
【0010】
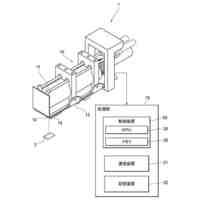
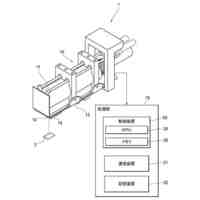
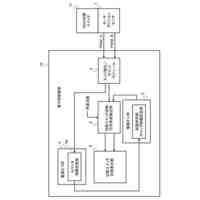
本開示の実施形態に係る経路生成装置の機能的構成図である。
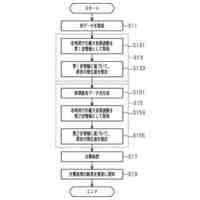
本開示の実施形態に係る経路生成装置の動作例を示すフローチャートである。
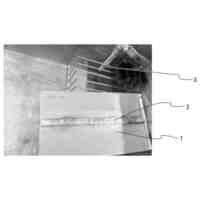
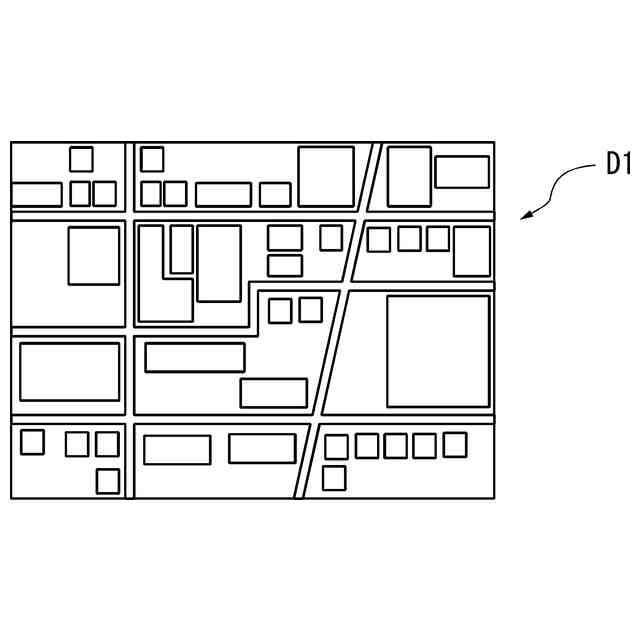
本開示の実施形態に係る鳥瞰画像の例を示す図である。
本開示の実施形態に係る道路領域の抽出例を示す図である。
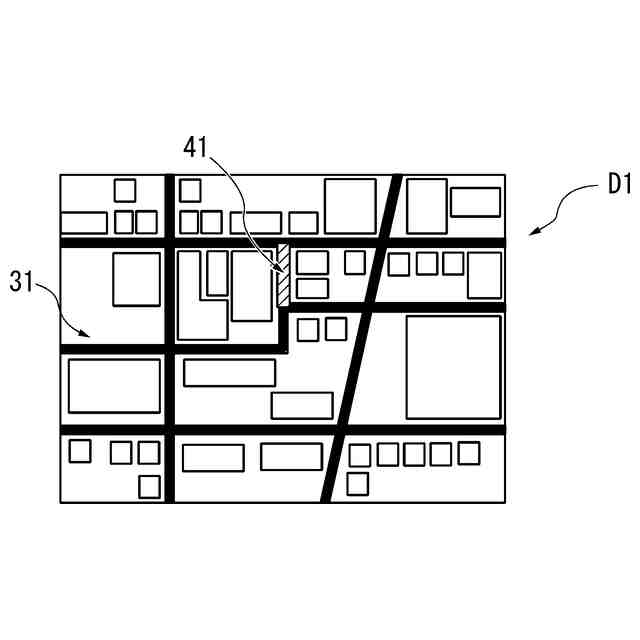
本開示の実施形態に係る鳥瞰画像に道路領域を重畳させた画像の例を示す図である。
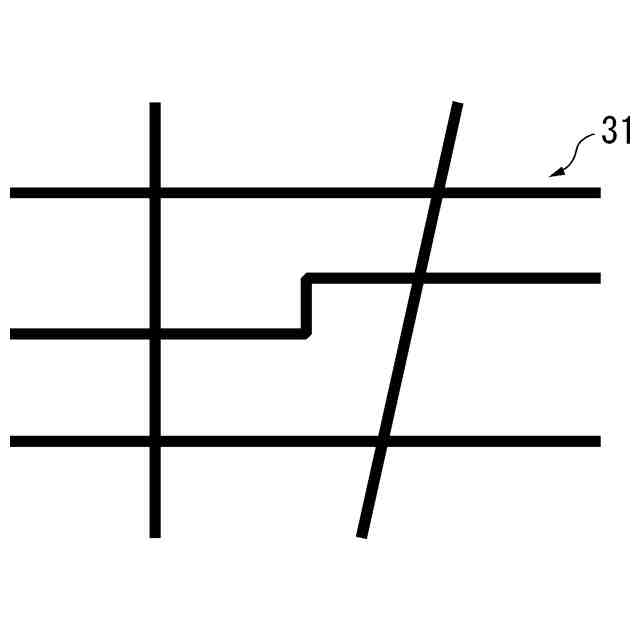
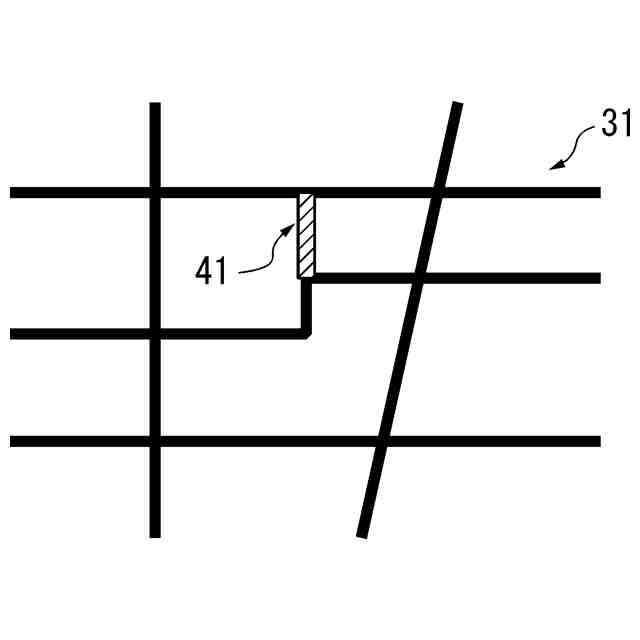
本開示の実施形態に係る道路領域と走行可能領域とを統合させた例を示す図である。
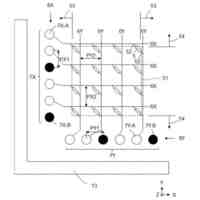
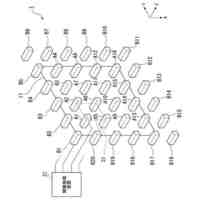
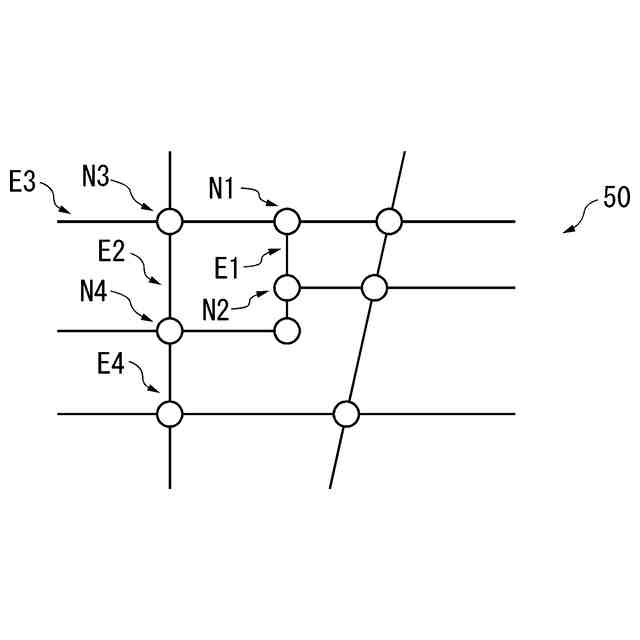
本開示の実施形態に係るグラフ構造の例を示す図である。
本開示の実施形態に係るグラフ構造に始点と終点を追加した例を示す図である。
本開示の実施形態に係る最適経路の例を示す図である。
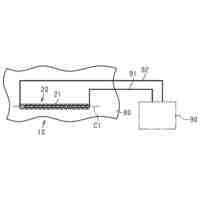
本開示の実施形態の変形例を説明するための図である。
本開示の実施形態に係るコンピュータの構成を示す概略ブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
表示装置
16日前
個人
準結晶の解析方法
22日前
株式会社エビス
水準器
15日前
日本精機株式会社
アセンブリ
22日前
株式会社豊田自動織機
自動走行体
21日前
個人
浸透探傷試験方法
11日前
日本碍子株式会社
ガスセンサ
15日前
株式会社不二越
塵埃噴射装置
10日前
株式会社東芝
センサ
10日前
トヨタ自動車株式会社
制御装置
11日前
日本特殊陶業株式会社
ガスセンサ
10日前
日本特殊陶業株式会社
ガスセンサ
9日前
GEE株式会社
光学特性測定装置
21日前
日本特殊陶業株式会社
ガスセンサ
22日前
個人
多段電磁加速による高力積衝撃試験機
3日前
株式会社不二越
X線測定装置
16日前
株式会社TISM
センサ部材
21日前
学校法人 中央大学
管内径推定装置
1日前
TDK株式会社
アレイセンサ
11日前
株式会社不二越
X線測定装置
16日前
東洋紡株式会社
ヘムタンパク質の安定化方法
4日前
TDK株式会社
計測装置
16日前
株式会社小糸製作所
物体検知システム
22日前
大和製衡株式会社
表示システム
28日前
大和ハウス工業株式会社
引張装置
29日前
栗田工業株式会社
水処理システム
14日前
個人
簡易・迅速タンパク質検出装置および方法
11日前
TDK株式会社
温度センサ
14日前
エスペック株式会社
温度槽及び試験方法
17日前
トヨタ自動車株式会社
音源推定方法
28日前
株式会社イシダ
搬送装置
28日前
アンリツ株式会社
機器及びフィルタ
22日前
トヨタ自動車株式会社
鋳巣の強度評価方法
1日前
株式会社 システムスクエア
検査選別装置
11日前
Astemo株式会社
電子制御装置
18日前
ローム株式会社
加速度センサ
11日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ