TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025049908
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023158408
出願日
2023-09-22
発明の名称
情報処理装置及び情報処理方法
出願人
KDDI株式会社
代理人
弁理士法人創光国際特許事務所
,
個人
,
個人
,
個人
主分類
G08G
1/00 20060101AFI20250327BHJP(信号)
要約
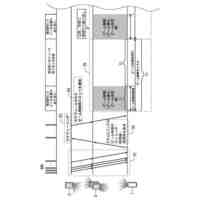
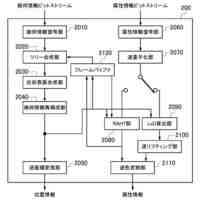
【課題】仮想空間において車両を再現する場合に車両の挙動に対応して車両の前輪の向きを再現する。
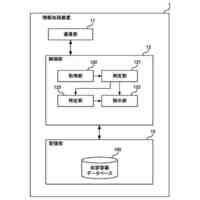
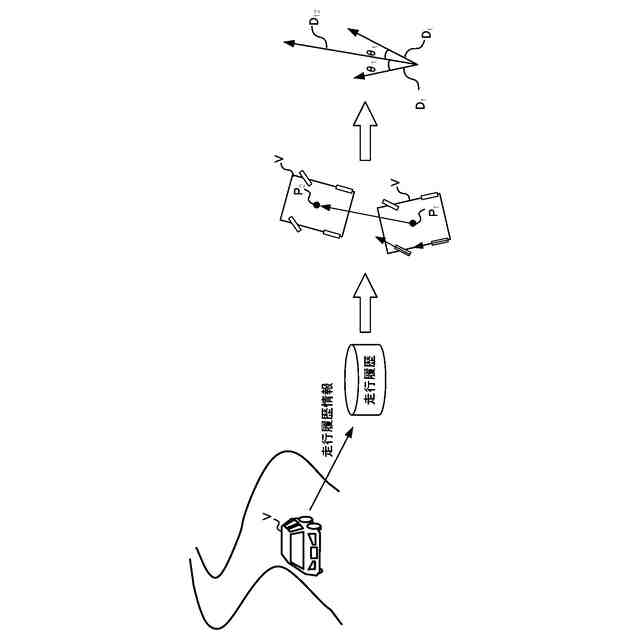
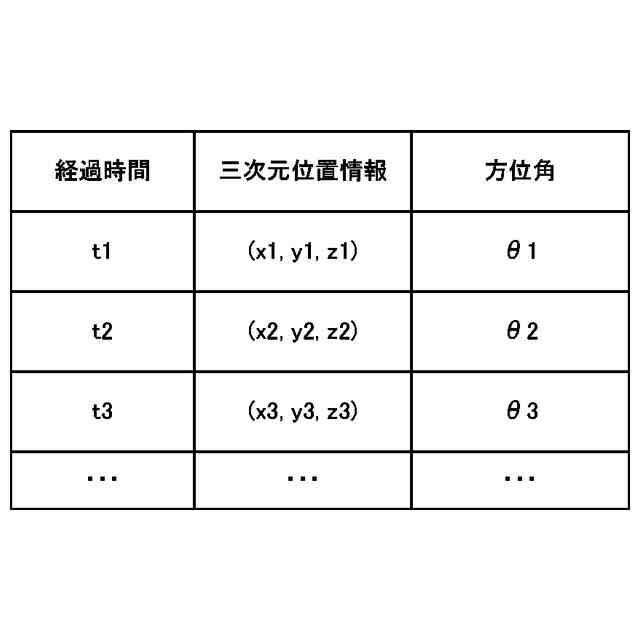
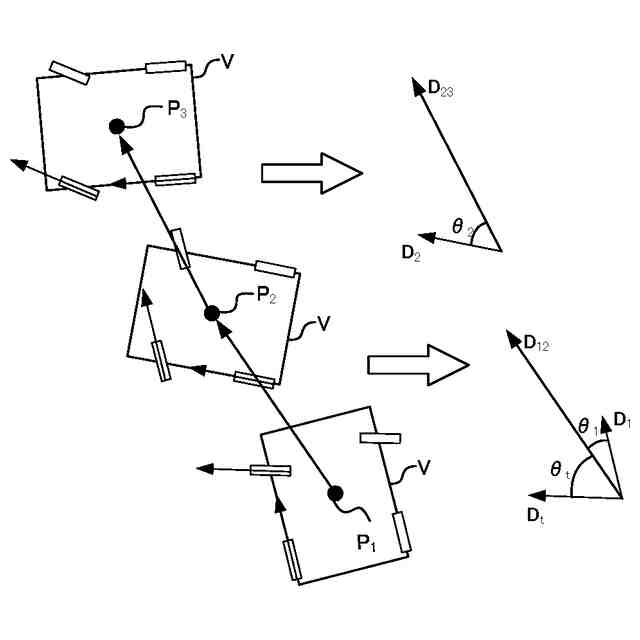
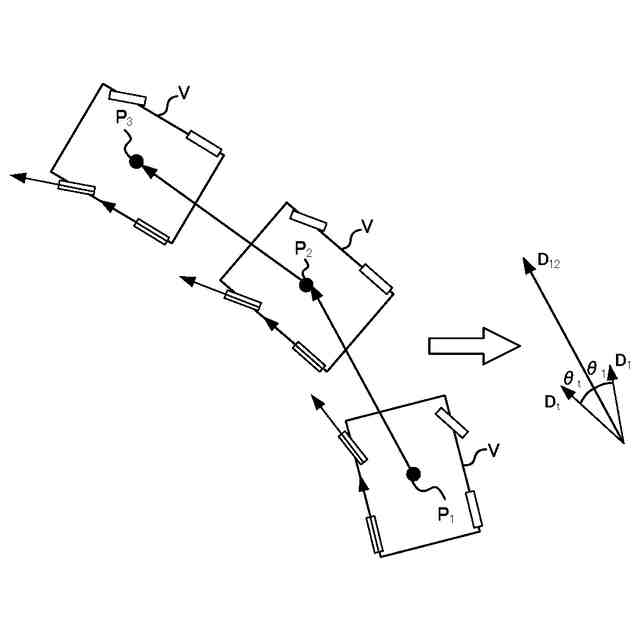
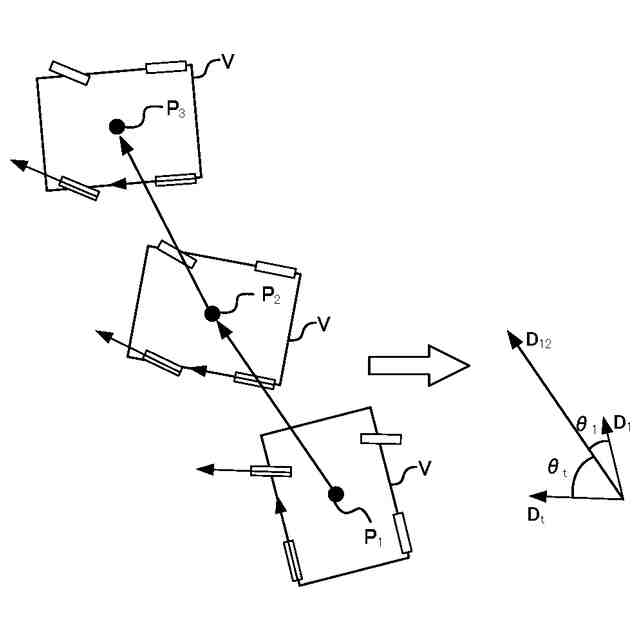
【解決手段】情報処理装置は、時刻を示す時刻情報と、当該時刻における車両Vの位置を示す位置情報と、当該時刻における車両の向きを示す向き情報とを関連付けた走行履歴情報を参照し、第1時刻における車両の位置と、第1時刻よりも後の第2時刻における車両Vの位置とに基づいて、第1時刻から第2時刻までの期間である第1期間における車両Vの進行方向D
12
を特定するとともに、第1時刻における車両Vの向きD
1
を特定する第1特定部と、特定された第1期間における車両Vの進行方向D
12
と第1時刻における車両Vの向きD
1
とがなす角度である第1角度θ
1
を特定する第2特定部と、特定された第1角度θ
1
に基づいて、第1時刻における車両Vの前輪の向きD
t
を特定する第3特定部と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
時刻を示す時刻情報と、前記時刻における車両の位置を示す位置情報と、前記時刻における車両の向きを示す向き情報とを関連付けた走行履歴情報を参照し、第1時刻における前記車両の位置と、前記第1時刻よりも後の第2時刻における前記車両の位置とに基づいて、前記第1時刻から前記第2時刻までの期間である第1期間における前記車両の進行方向を特定するとともに、前記第1時刻における前記車両の向きを特定する第1特定部と、
前記第1特定部が特定した前記第1期間における車両の進行方向と前記第1時刻における前記車両の向きとがなす角度である第1角度を特定する第2特定部と、
前記第2特定部が特定した前記第1角度に基づいて、前記第1時刻における前記車両の前輪の向きを特定する第3特定部と、
を有する情報処理装置。
続きを表示(約 1,400 文字)
【請求項2】
前記第3特定部は、前記第1角度に所定の係数を乗算することにより、前記車両の向きと前記車両の前輪の向きとがなす角度を算出し、算出した角度に基づいて、前記車両の前輪の向きを特定する、
請求項1に記載の情報処理装置。
【請求項3】
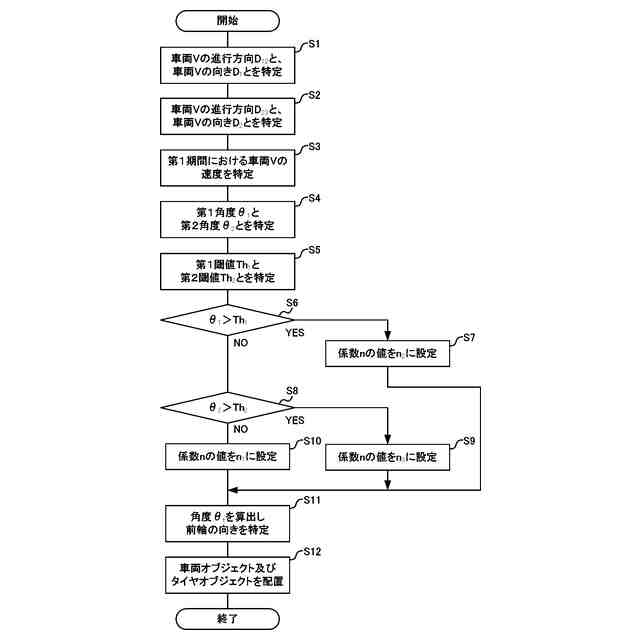
前記第2特定部が特定した前記第1角度が所定の角度を超える場合に、前記第1時刻において前記車両がドリフト走行をしていると判定し、前記第1角度が所定の角度以下である場合に、前記第1時刻において前記車両がドリフト走行をしていないと判定する判定部を有し、
前記第3特定部は、前記車両がドリフト走行をしていると前記判定部が判定すると、前記車両がドリフト走行をしていないと前記判定部が判定した場合に比べて、前記所定の係数を小さくする、
請求項2に記載の情報処理装置。
【請求項4】
前記第1特定部は、第2時刻における前記車両の位置と、前記第2時刻よりも後の第3時刻における前記車両の位置とに基づいて、前記第2時刻から前記第3時刻までの期間である第2期間における前記車両の進行方向を特定するとともに、前記第2時刻における前記車両の向きを特定し、
前記第2特定部は、前記第1特定部が特定した前記第2期間における車両の進行方向と前記第2時刻における前記車両の向きとがなす角度である第2角度を特定し、
前記判定部は、前記第1時刻において前記車両がドリフト走行をしているか否かを判定するとともに、前記第2角度が所定の角度を超える場合に、前記第2時刻において前記車両がドリフト走行をしていると判定し、
前記第3特定部は、前記第2時刻において前記車両がドリフト走行をしていると前記判定部が判定し、前記第1時刻において前記車両がドリフト走行をしていないと前記判定部が判定すると、前記第1時刻及び前記第2時刻において前記車両がドリフト走行をしていないと判定した場合に比べて、前記所定の係数を大きくする、
請求項3に記載の情報処理装置。
【請求項5】
前記第1特定部は、第1時刻における前記車両の位置と、前記第1時刻よりも後の第2時刻における前記車両の位置とに基づいて、前記第1期間における前記車両の速度を特定し、
前記第3特定部は、前記車両がドリフト走行をしていないと前記判定部が判定した場合に、前記第1特定部が特定した前記車両の速度が小さければ小さいほど、前記所定の係数を小さくする、
請求項3に記載の情報処理装置。
【請求項6】
コンピュータが実行する、
時刻を示す時刻情報と、前記時刻における車両の位置を示す位置情報と、前記時刻における車両の向きを示す向き情報とを関連付けた走行履歴情報を参照し、第1時刻における前記車両の位置と、前記第1時刻よりも後の第2時刻における前記車両の位置とに基づいて、前記第1時刻から前記第2時刻までの期間である第1期間における前記車両の進行方向を特定するとともに、前記第1時刻における前記車両の向きを特定するステップと、
特定した前記第1期間における車両の進行方向と前記第1時刻における前記車両の向きとがなす角度である第1角度を特定するステップと、
前記第1角度に基づいて、前記第1時刻における前記車両の前輪の向きを特定するステップと、
を有する情報処理方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置及び情報処理方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
現実世界を模擬した模擬データを構築し、構築した模擬データを用いて現実世界と同じ環境を仮想空間で再現する技術であるデジタルツインが知られている。例えば、特許文献1では、走行車両の走行データを生成し、生成した走行データに基づいて当該走行車両の走行を仮想空間で再現する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-44080号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
走行データを示す情報が車両の位置情報であり、走行データを示す情報に車両の操舵情報が含まれない場合、位置情報に基づいて車両の走行を再現することができるものの、操舵情報に基づいて前輪の向きを再現することができない。このため、仮想空間に再現した車両の挙動と前輪の向きとが対応せず、不自然な状態となってしまう。
【0005】
そこで、本発明はこれらの点に鑑みてなされたものであり、仮想空間において車両を再現する場合に車両の挙動に対応して車両の前輪の向きを再現できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
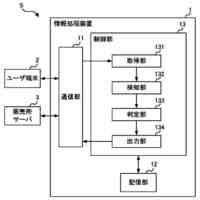
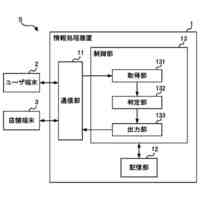
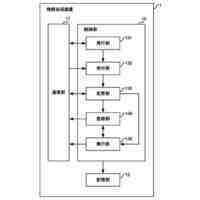
本発明の第1の態様に係る情報処理装置は、時刻を示す時刻情報と、前記時刻における車両の位置を示す位置情報と、前記時刻における車両の向きを示す向き情報とを関連付けた走行履歴情報を参照し、第1時刻における前記車両の位置と、前記第1時刻よりも後の第2時刻における前記車両の位置とに基づいて、前記第1時刻から前記第2時刻までの期間である第1期間における前記車両の進行方向を特定するとともに、前記第1時刻における前記車両の向きを特定する第1特定部と、前記第1特定部が特定した前記第1期間における車両の進行方向と前記第1時刻における前記車両の向きとがなす角度である第1角度を特定する第2特定部と、前記第2特定部が特定した前記第1角度に基づいて、前記第1時刻における前記車両の前輪の向きを特定する第3特定部と、を有する。
【0007】
前記第3特定部は、前記第1角度に所定の係数を乗算することにより、前記車両の向きと前記車両の前輪の向きとがなす角度を算出し、算出した角度に基づいて、前記車両の前輪の向きを特定してもよい。
【0008】
前記情報処理装置は、前記第2特定部が特定した前記第1角度が所定の角度を超える場合に、前記第1時刻において前記車両がドリフト走行をしていると判定し、前記第1角度が所定の角度以下である場合に、前記第1時刻において前記車両がドリフト走行をしていないと判定する判定部を有し、前記第3特定部は、前記車両がドリフト走行をしていると前記判定部が判定すると、前記車両がドリフト走行をしていないと前記判定部が判定した場合に比べて、前記所定の係数を小さくしてもよい。
【0009】
前記第1特定部は、第2時刻における前記車両の位置と、前記第2時刻よりも後の第3時刻における前記車両の位置とに基づいて、前記第2時刻から前記第3時刻までの期間である第2期間における前記車両の進行方向を特定するとともに、前記第2時刻における前記車両の向きを特定し、前記第2特定部は、前記第1特定部が特定した前記第2期間における車両の進行方向と前記第2時刻における前記車両の向きとがなす角度である第2角度を特定し、前記判定部は、前記第1時刻において前記車両がドリフト走行をしているか否かを判定するとともに、前記第2角度が所定の角度を超える場合に、前記第2時刻において前記車両がドリフト走行をしていると判定し、前記第3特定部は、前記第2時刻において前記車両がドリフト走行をしていると前記判定部が判定し、前記第1時刻において前記車両がドリフト走行をしていないと前記判定部が判定すると、前記第1時刻及び前記第2時刻において前記車両がドリフト走行をしていないと判定した場合に比べて、前記所定の係数を大きくしてもよい。
【0010】
前記第1特定部は、第1時刻における前記車両の位置と、前記第1時刻よりも後の第2時刻における前記車両の位置とに基づいて、前記第1期間における前記車両の速度を特定し、前記第3特定部は、前記車両がドリフト走行をしていないと前記判定部が判定した場合に、前記第1特定部が特定した前記車両の速度が小さければ小さいほど、前記所定の係数を小さくしてもよい。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
KDDI株式会社
伸展マスト
26日前
KDDI株式会社
基地局及び通信端末
26日前
KDDI株式会社
参照信号の設定方法及び装置
24日前
KDDI株式会社
参照信号の設定方法及び装置
24日前
KDDI株式会社
画像検索装置及びプログラム
12日前
KDDI株式会社
情報処理装置及び情報処理方法
24日前
KDDI株式会社
情報処理装置及び情報処理方法
25日前
KDDI株式会社
情報処理装置及び情報処理方法
25日前
KDDI株式会社
情報処理装置及び情報処理方法
25日前
KDDI株式会社
無線システム及び通信制御方法
25日前
KDDI株式会社
話し掛け判断装置及びプログラム
25日前
KDDI株式会社
通信装置、通信方法及びプログラム
25日前
KDDI株式会社
端末装置、および無線通信システム
24日前
KDDI株式会社
端末装置、および無線通信システム
24日前
KDDI株式会社
リンクアダプテーション方法及び装置
24日前
KDDI株式会社
リンクアダプテーション方法及び装置
24日前
KDDI株式会社
無線通信システムおよびその制御方法
25日前
KDDI株式会社
無線通信システムおよびその制御方法
25日前
KDDI株式会社
通信システム、情報端末及びプログラム
27日前
KDDI株式会社
通信端末、距離測定方法及びプログラム
26日前
KDDI株式会社
学習支援システム、方法及びプログラム
24日前
KDDI株式会社
基地局装置、端末装置及び無線通信方法
26日前
KDDI株式会社
制御装置、通信システムおよび制御方法
25日前
KDDI株式会社
通信システム、情報端末及びプログラム
27日前
KDDI株式会社
基地局装置、端末装置及び無線通信方法
26日前
KDDI株式会社
表示制御装置、表示システム及びプログラム
26日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
24日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
24日前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
18日前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
17日前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
17日前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
17日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
24日前
KDDI株式会社
情報処理装置、情報処理方法、及びプログラム
26日前
KDDI株式会社
プログラム、情報処理装置、及び情報処理方法
25日前
KDDI株式会社
情報処理装置、情報処理方法、及びプログラム
25日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ