TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025047646
公報種別
公開特許公報(A)
公開日
2025-04-03
出願番号
2023156257
出願日
2023-09-21
発明の名称
モータ駆動制御装置およびモータ駆動制御方法
出願人
ミネベアミツミ株式会社
代理人
アインゼル・フェリックス=ラインハルト
,
個人
,
個人
主分類
H02P
6/185 20160101AFI20250326BHJP(電力の発電,変換,配電)
要約
【課題】モータのロータの位置を短時間で、低分解能の電流測定装置により検出することができるモータ駆動制御装置を提供する。
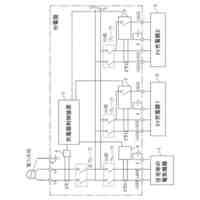
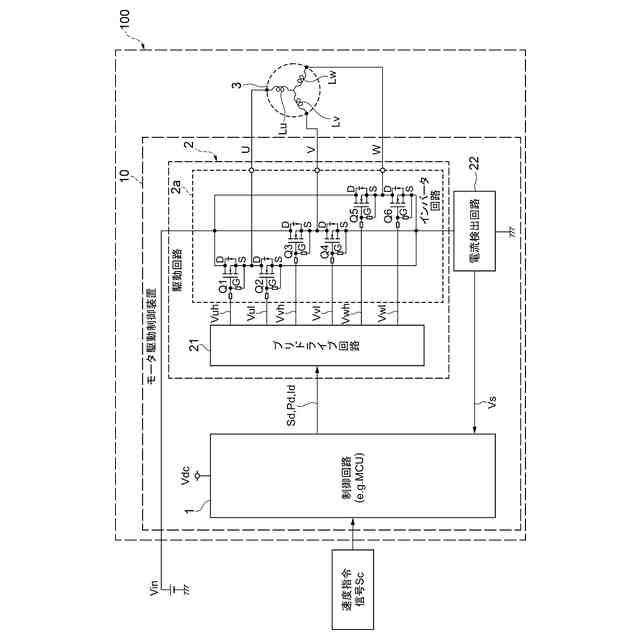
【解決手段】駆動制御信号を生成する制御回路と、前記モータの各相のコイルに対応して設けられたスイッチを含むインバータ回路を有し、前記駆動制御信号に応じて前記スイッチを交互にオン・オフさせて、前記モータのロータを回転させる駆動回路と、前記インバータ回路とグランドの間に設けられたシャント抵抗と、前記シャント抵抗に流れる電流を双方向において検出する双方向電流検出回路とを備え、前記制御回路は、前記モータのロータを回転させずに通電セクタを順次切り替えてコイルの通電方向において通電と遮断とを行い、前記通電セクタごとの通電電流のピーク値と誘導性キックバックによるキックバック電流のピーク値とに基づいて前記ロータの位置を推定する。
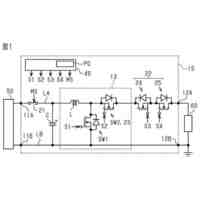
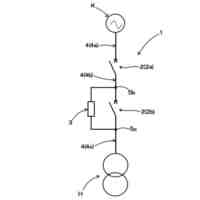
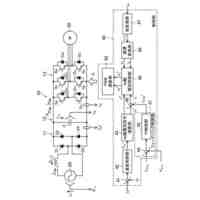
【選択図】図1
特許請求の範囲
【請求項1】
少なくとも1相のコイルを有するモータを駆動するための駆動制御信号を生成する制御回路と、
前記モータの各相のコイルに対応して設けられた互いに直列に接続されたハイサイドスイッチおよびローサイドスイッチを含むインバータ回路を有し、前記駆動制御信号に応じて前記ハイサイドスイッチと前記ローサイドスイッチを交互にオン・オフさせて、対応する相のコイルの通電方向を切り替えることにより、前記モータのロータを回転させる駆動回路と、
前記インバータ回路とグランドの間に設けられたシャント抵抗と、
前記シャント抵抗に流れる電流を、前記インバータ回路からグランドに向かうグランド方向およびその逆方向であるインバータ回路方向の双方向において検出する双方向電流検出回路と、を備え、
前記制御回路は、
前記モータのロータを回転させずに通電セクタを順次切り替えるように前記インバータ回路の前記ハイサイドスイッチと前記ローサイドスイッチをオン・オフさせて、前記通電セクタに対応するコイルの通電方向において通電と遮断とを行う初期位置検出信号を生成し、
前記初期位置検出信号を生成したときに前記双方向電流検出回路において検出した電流に基づいて、前記通電セクタごとに、前記通電したときに前記グランド方向に流れる通電電流のピーク値と、前記通電を遮断したときに前記インバータ回路方向に流れる誘導性キックバックによるキックバック電流のピーク値とを取得し、
前記通電セクタごとの前記通電電流のピーク値と前記キックバック電流のピーク値とに基づいて前記ロータの位置を推定する、
モータ駆動制御装置。
続きを表示(約 1,900 文字)
【請求項2】
請求項1に記載のモータ駆動制御装置において、
前記制御回路は、
前記インバータ回路に入力してコイルの通電方向における通電と遮断とを前記通電セクタごとに順次行う前記初期位置検出信号を生成する初期位置検出信号生成部と、
前記通電セクタごとに、前記通電電流のピーク値と前記キックバック電流のピーク値とを取得するピーク電流取得部と、
前記通電セクタごとの前記通電電流のピーク値と前記キックバック電流のピーク値とに基づいて前記ロータの位置を推定する位置推定部と、を有する、
モータ駆動制御装置。
【請求項3】
請求項2に記載のモータ駆動制御装置において、
前記初期位置検出信号生成部は、
前記キックバック電流の大きさがゼロに収束したことを確認した後に、次の前記通電セクタの通電を行う前記初期位置検出信号を生成する、
モータ駆動制御装置。
【請求項4】
請求項2に記載のモータ駆動制御装置において、
前記ピーク電流取得部は、
前記通電電流のピーク値を取得し、マスク時間が経過した後に前記キックバック電流を取得する、
モータ駆動制御装置。
【請求項5】
請求項2に記載のモータ駆動制御装置において、
前記位置推定部は、前記通電セクタごとの前記通電電流と前記キックバック電流との合計電流値を比較して、最大の合計電流値となった前記通電セクタに対応する位置を前記ロータの位置として推定する、
モータ駆動制御装置。
【請求項6】
請求項5に記載のモータ駆動制御装置において、
前記位置推定部は、前記最大の合計電流値となった通電セクタが1つに決まらない場合に、前記グランド方向に流れる通電電流のピーク値が最大となった通電セクタと、前記インバータ回路方向に流れる誘導性キックバックによるキックバック電流のピーク値が最大となった通電セクタとをそれぞれ取得し、取得した通電セクタの数に応じて、前記ロータの位置として推定する、
モータ駆動制御装置。
【請求項7】
請求項5に記載のモータ駆動制御装置において、
前記位置推定部は、前記最大の合計電流値となった通電セクタが1つに決まらない場合に、前記通電セクタごとに、グランド方向に流れる通電電流のピーク値の大きさとインバータ回路方向に流れる誘導性キックバックによるキックバック電流のピーク値の大きさとを合計した電流値である合計電流値からさらに3つの双方向通電の電流の差分を取得し、前記3つの双方向通電の電流の差分の最大値が1つの場合、前記電流の差分が最大値であった双方向通電の2つ通電セクタのうちで前記合計電流値が大きい通電セクタに対応する位置にロータの位置があると推定する、
モータ駆動制御装置。
【請求項8】
請求項2に記載のモータ駆動制御装置において、
前記初期位置検出信号生成部は、前記通電セクタに対応するコイルの通電方向における通電を、複数の所定回数に分割して行うように設定した前記初期位置検出信号を生成する、
モータ駆動制御装置。
【請求項9】
請求項2に記載のモータ駆動制御装置において、
前記初期位置検出信号生成部は、前記通電セクタにおける遮断のタイミングで、前記インバータ回路のハイサイドスイッチおよびローサイドスイッチのうちで、通電時とは相補的な関係にあるスイッチをオンさせるように設定した前記初期位置検出信号を生成する、
モータ駆動制御装置。
【請求項10】
請求項1に記載のモータ駆動制御装置において、
前記制御回路は、 前記インバータ回路に含まれる前記ハイサイドスイッチと前記ローサイドスイッチの全てをオフとする第1のスイッチ状態から、前記インバータ回路に含まれる前記ハイサイドスイッチまたは前記ローサイドスイッチのうちの少なくとも2つをオンとする第2のスイッチ状態に切り替える第1切替部と、
前記第2のスイッチ状態から前記第1のスイッチ状態に切り替える第2切替部と、
前記第2のスイッチ状態から前記第1のスイッチ状態に切り替えたときに、前記シャント抵抗に流れる電流に基づいて前記モータのロータが空転していることを判定する空転判定部とをさらに有し、
前記制御回路は、前記空転判定部で前記モータのロータが空転していないことを確認した後に前記初期位置検出信号を生成する、
モータ駆動制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ駆動制御装置及びモータ駆動制御方法に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
位置センサレス方式の3相BLDCモータ(brushless dc motor)において、停止しているモータのロータ初期位置検出(Initial Position Detection)として、1相励磁または1-2相励磁で、6方向の通電毎に巻線を通電により励磁させて、「規定電流への到達時間」または「規定時間における最大電流」を測定することにより、通電方向毎のコイルの磁気飽和の影響による時間または電流による差分を利用してロータの磁極位置(初期位置)を検出する方法が知られている(特許文献1,2,3)。
【先行技術文献】
【特許文献】
【0003】
特開2010-41881号公報
特開2016-19454号公報
特開2021-164191号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のロータの磁極位置の検出方法では、突極性の小さいSPMSM(Surface permanent magnet synchronous motor)において、小電流の場合、コイルの磁気飽和による影響が小さく、ロータ位置が60度の範囲(通電セクタ)で一意に決まらない問題があり、大電流の場合、コイルの磁気飽和によりロータ位置が決まるが、通電による「カツン」という磁気音の発生や、ロータが意図に反して回転してしまう問題がある。また、電流測定の分解能が低い場合、測定した差分が小さくなることにより、ロータの磁極位置の検出が困難になる問題がある。
【0005】
本発明者らは、上記問題について鋭意検討したところ、1シャント方式の電流測定において、双方向電流検出回路を利用し、通電時にグランド方向に流れる通電電流と、遮断時にインバータ回路方向に流れる誘導性キックバックによるキックバック電流の両方を利用することによって、通電方向毎に規定時間において測定した電流の差分を大きくするために通電電流を増やすことなく、短時間で、低分解能の電流測定装置によるロータ初期位置検出が可能となり、キックバック電流がゼロに収束した後の次の通電開始により、正しい電流測定が行え、全6方向通電の測定時間が短縮することを見出し、本発明に至った。
【0006】
本発明は、上述した課題を解消するためのものであり、短時間で、低分解能の電流測定装置によるロータ初期位置検出をすることができるモータ駆動制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の代表的な実施の形態に係るモータ駆動制御装置は、少なくとも1相のコイルを有するモータを駆動するための駆動制御信号を生成する制御回路と、前記モータの各相のコイルに対応して設けられた互いに直列に接続されたハイサイドスイッチおよびローサイドスイッチを含むインバータ回路を有し、前記駆動制御信号に応じて前記ハイサイドスイッチと前記ローサイドスイッチを交互にオン・オフさせて、対応する相のコイルの通電方向を切り替えることにより、前記モータのロータを回転させる駆動回路と、前記インバータ回路とグランドの間に設けられたシャント抵抗と、前記シャント抵抗に流れる電流を、前記インバータ回路からグランドに向かうグランド方向およびその逆方向であるインバータ回路方向の双方向において検出する双方向電流検出回路と、を備え、前記制御回路は、前記モータのロータを回転させずに通電セクタを順次切り替えるように前記インバータ回路の前記ハイサイドスイッチと前記ローサイドスイッチをオン・オフさせて、前記通電セクタに対応するコイルの通電方向において通電と遮断とを行う初期位置検出信号を生成し、前記初期位置検出信号を生成したときに前記双方向電流検出回路において検出した電流に基づいて、前記通電セクタごとに、前記通電したときに前記グランド方向に流れる通電電流のピーク値と、前記通電を遮断したときに前記インバータ回路方向に流れる誘導性キックバックによるキックバック電流のピーク値とを取得し、前記通電セクタごとの前記通電電流のピーク値と前記キックバック電流のピーク値とに基づいて前記ロータの位置を推定することを特徴とする。
【発明の効果】
【0008】
本発明の一態様によれば、短時間で、低分解能の電流測定装置によるロータ初期位置検出をすることが可能となる。
【図面の簡単な説明】
【0009】
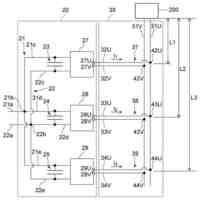
実施の形態に係るモータ駆動制御装置10を備えたモータユニット100の構成を示す図である。
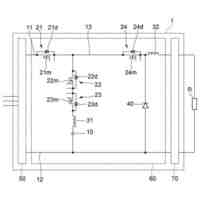
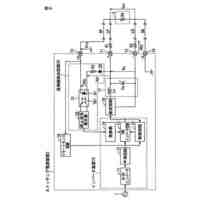
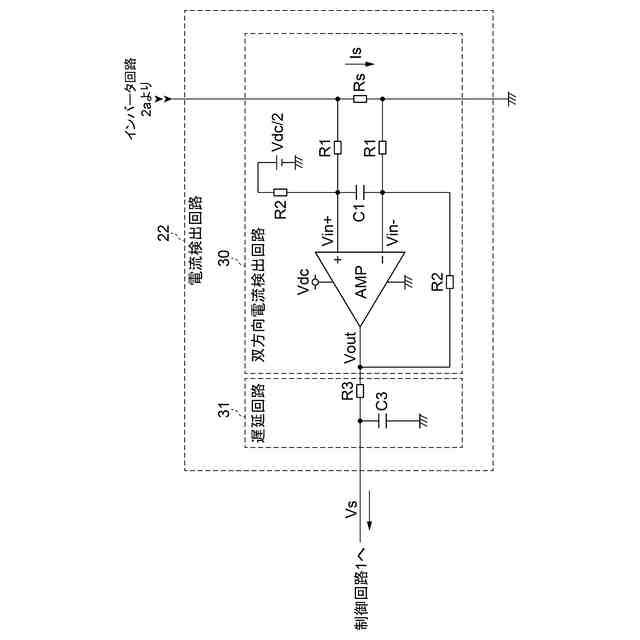
モータ駆動制御装置10の電流検出回路22の構成例を示す図である。
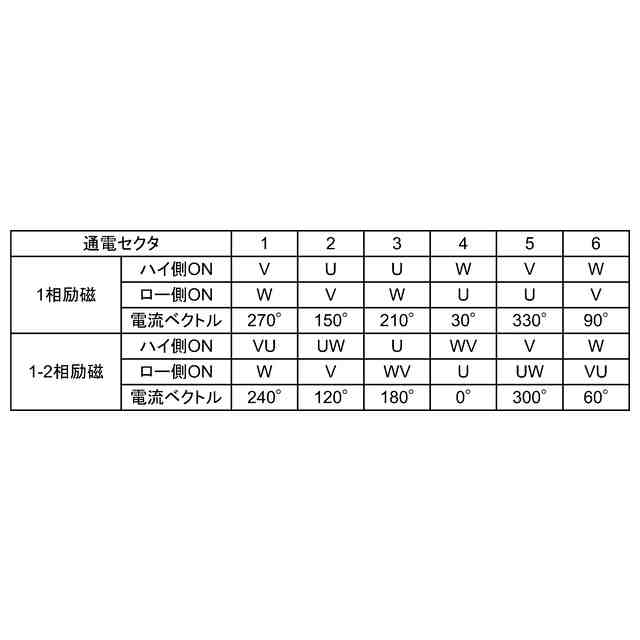
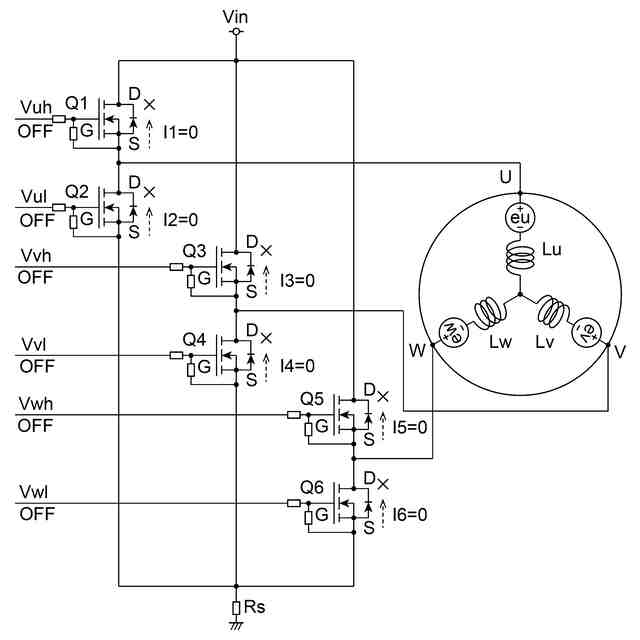
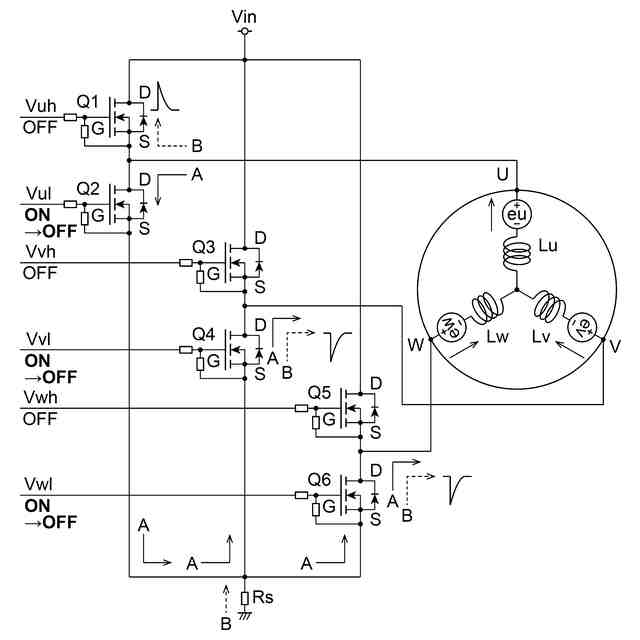
3相のモータ3の各通電セクタにおける、インバータ回路2aのスイッチ状態と電流ベクトルとを示す図である。
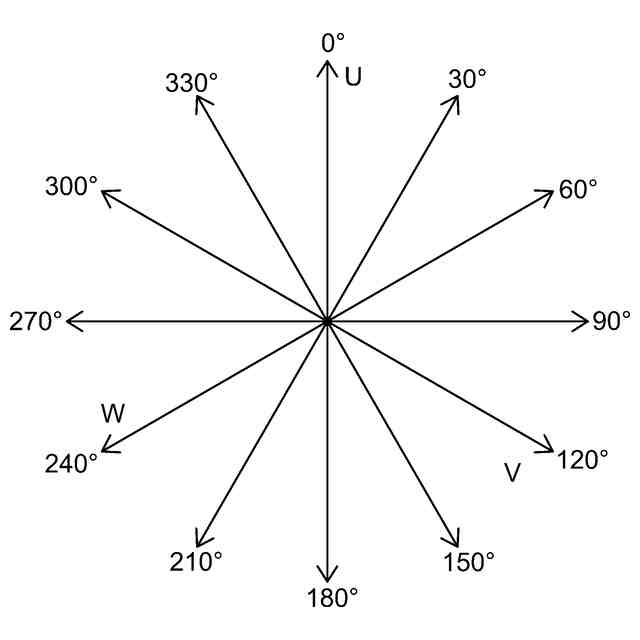
電流ベクトルの具体的な方向を示す図である。
空転制御信号Idによって切り替えられる、フリーモードに対応するスイッチ状態を説明するための図である。
空転制御信号Idによって切り替えられる、充電モードに対応するスイッチ状態を説明するための図である。
空転制御信号Idによって切り替えられる、放電モードに対応するスイッチ状態を説明するための図である。
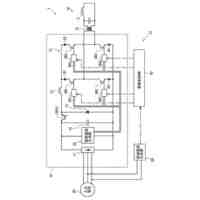
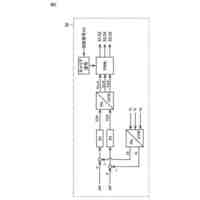
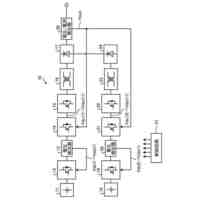
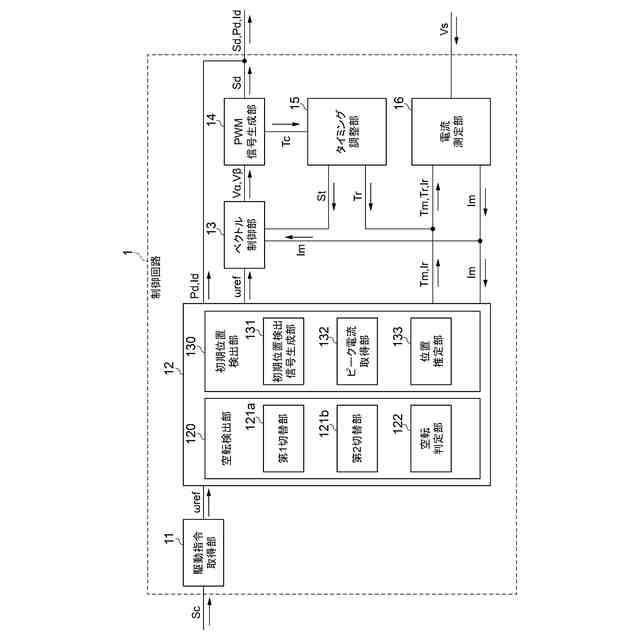
実施の形態に係るモータ駆動制御装置10における制御回路1の機能ブロック構成を示す図である。
モータ駆動制御装置10の制御回路1に含まれる電流測定部16の構成例を示す図である。
モータ3のロータが全く動いていないときにおいて、速度指令信号Scが入力され、ロータ空転検出が終了するまでの信号波形の一例を示すタイミングチャートを示す図である。
モータ3のロータが動いているときにおいて、速度指令信号Scが入力され、ロータ空転検出が終了するまでの信号波形の一例を示すタイミングチャートを示す図である。
モータユニット100に電源投入後、速度指令信号Scが入力され、ロータの停止が確認された後、ロータ初期位置検出が終了するまでの信号波形の一例を示すタイミングチャートを示す図である。
モータユニット100に電源投入後、速度指令信号Scが入力され、ロータの停止が確認された後、ロータ初期位置検出が終了するまでの信号波形の他の一例を示すタイミングチャートを示す図である。
モータユニット100に電源投入後、速度指令信号Scが入力され、ロータの停止が確認された後、ロータ初期位置検出のうちの1つの通電セクタ分の通電・遮断の信号波形のさらに他の一例を示すタイミングチャートを示す図である。
実施の形態に係るモータ駆動制御装置10の制御回路1における電源投入時の処理の流れの一例を示すフローチャートである。
モータ駆動制御装置10の制御回路1によるオフセット測定の流れの一例を示すフローチャートである。
モータ駆動制御装置10の制御回路1によるロータ停止待ちの流れの一例を示すフローチャートである。
モータ駆動制御装置10の制御回路1によるロータ初期位置測定の流れの一例を示すフローチャートである。
モータ駆動制御装置10の制御回路1による通電セクタnにおけるロータ初期位置測定の流れの一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
1.実施の形態の概要
先ず、本願において開示される発明の代表的な実施の形態について概要を説明する。なお、以下の説明では、一例として、発明の構成要素に対応する図面上の参照符号を、括弧を付して記載している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
高電荷低電位電荷搬送体
3日前
個人
ファスナー式コード束ね
4日前
株式会社豊田自動織機
回転電機
3日前
未来工業株式会社
ゲージ
3日前
個人
回転電気装置及び発電装置
5日前
株式会社豊田自動織機
回転電機のロータ
4日前
株式会社コスメック
自立発電装置
5日前
コーセル株式会社
スイッチング電源装置
3日前
高周波熱錬株式会社
電源装置
4日前
高周波熱錬株式会社
電源装置
4日前
ニデック株式会社
ステータ、モータ及びドローン
4日前
株式会社ミツバ
端子ユニット
3日前
株式会社村田製作所
電源装置及びプログラム
5日前
株式会社ミツバ
モータ制御装置
3日前
本田技研工業株式会社
回転電機
3日前
株式会社ミツバ
モータ制御装置
3日前
株式会社ミツバ
モータ制御装置
3日前
株式会社ミツバ
モータ制御装置
3日前
株式会社力電
励磁突入電流の抑制回路システム
4日前
株式会社アイシン
バッテリケース
5日前
株式会社アイシン
車両用駆動装置
4日前
株式会社明電舎
電力変換装置
3日前
シンフォニアテクノロジー株式会社
電力変換装置
5日前
ダイキン工業株式会社
電気装置、空気調和機
3日前
株式会社デンソー
モータ
3日前
株式会社デンソー
回転電機
4日前
SWCC株式会社
ブッシング
3日前
矢崎総業株式会社
配索構造
5日前
株式会社ノエックス
EV充電器制御装置及びEV充電器
3日前
ニデック株式会社
積層鉄心の製造方法及び積層鉄心
3日前
トヨタ自動車株式会社
電池システム
5日前
トヨタ自動車株式会社
電池システム
4日前
ダイキン工業株式会社
電力変換装置
3日前
株式会社ダイヘン
直流電源回路
3日前
ニデック株式会社
積層鉄心及び積層鉄心の製造方法
3日前
オムロン株式会社
電力変換装置とその制御方法
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ