TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025045357
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023153291
出願日
2023-09-20
発明の名称
3D計測システム並びにその基準軸方向算出方法及び基準軸方向算出用治具、3D計測システムにおける計測方法及び計測用治具
出願人
株式会社IHIインフラシステム
代理人
弁理士法人アテンダ国際特許事務所
主分類
G01B
11/26 20060101AFI20250326BHJP(測定;試験)
要約
【課題】高精度の点群データ又は3Dデータを取得すること。
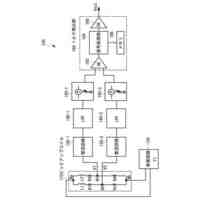
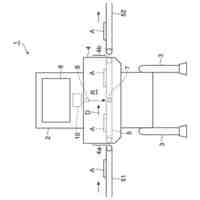
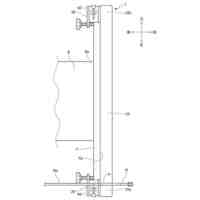
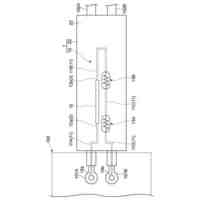
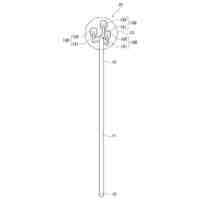
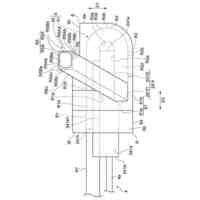
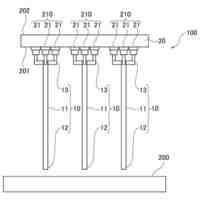
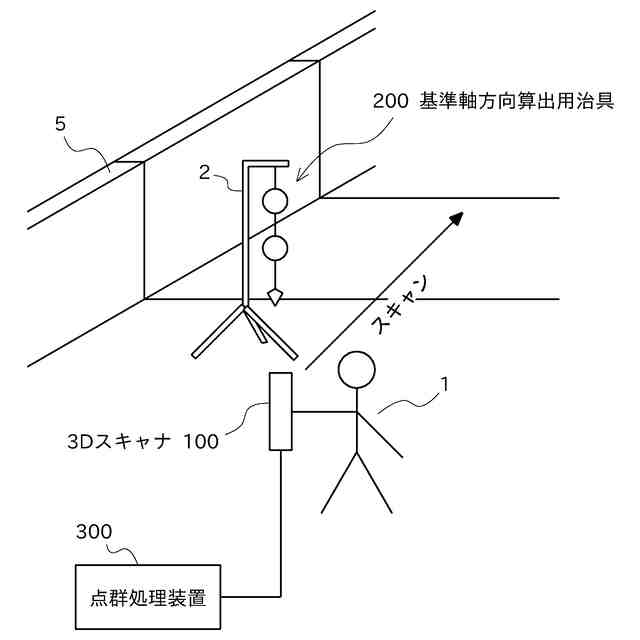
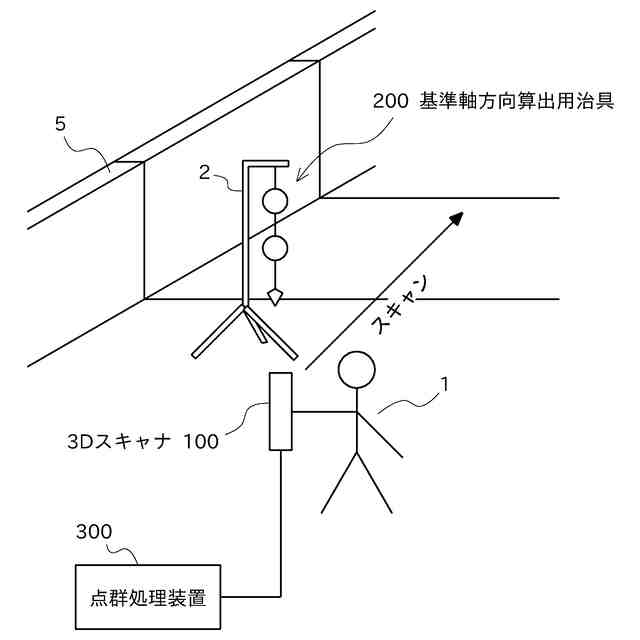
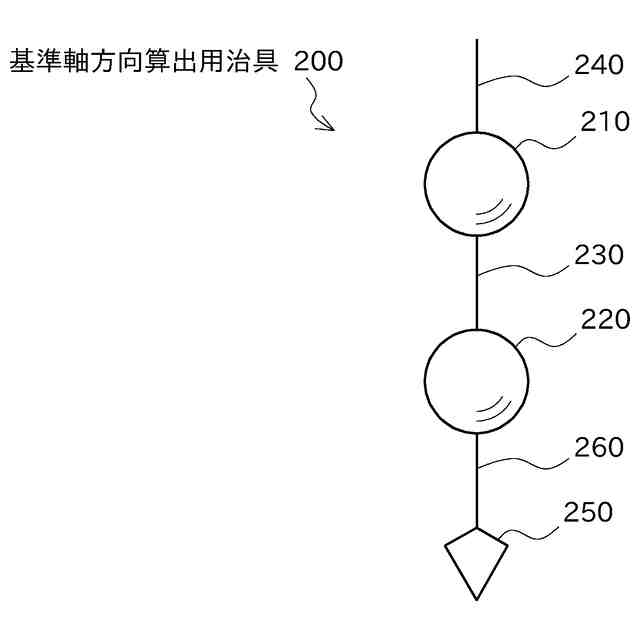
【解決手段】第1の球体210と、第2の球体220と、第1の球体210と第2の球体220との相対的な位置を維持する球体位置維持手段とを備えた補正処理用治具200を、現実空間内に配置する。3Dスキャナ200による計測時には補正処理用治具200が含まれる点群データを取得する。点群処理装置300において、第1の球体210の中心と第2の球体220の中心とを結ぶ仮想的な線が点群データ又は3Dデータの仮想空間座標系における基準軸と平行となるように仮想空間座標系の補正を行う。
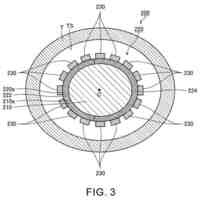
【選択図】図1
特許請求の範囲
【請求項1】
可搬型の3D計測装置により計測対象を含む現実空間を走査して点群データを取得し、前記点群データから計測対象の3Dデータを生成する3D計測システムにおける、仮想空間における基準軸の方向を算出する方法であって、
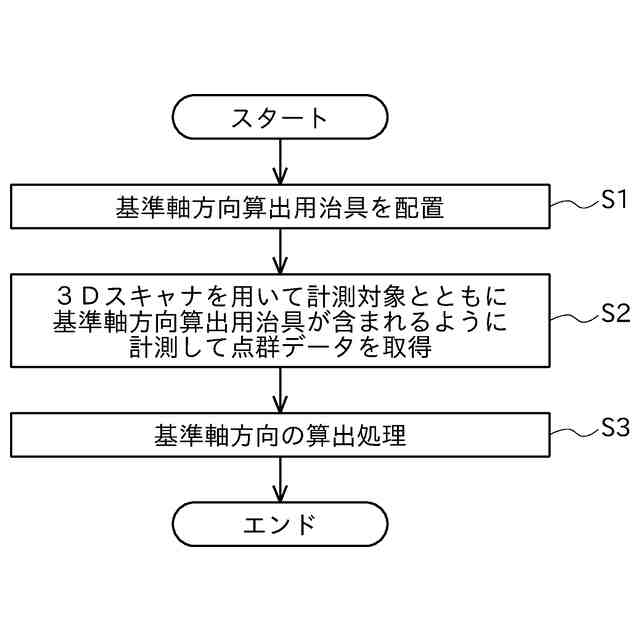
中心から一定半径の球面を有する第1の球体と、中心から一定半径の球面を有する第2の球体と、前記第1の球体と前記第2の球体との相対的な位置を維持する球体位置維持手段と、を備えた治具を、前記現実空間内に配置する第1のステップと、
前記3D計測装置により前記現実空間内に配置された前記治具が含まれる点群データを取得する第2のステップと、
前記仮想空間における前記第1の球体の中心と前記第2の球体の中心とを結ぶ仮想的な線の方向を算出して前記仮想空間における基準軸の方向とする第3のステップとを含む
ことを特徴とする3D計測システムにおける基準軸方向算出方法。
続きを表示(約 2,400 文字)
【請求項2】
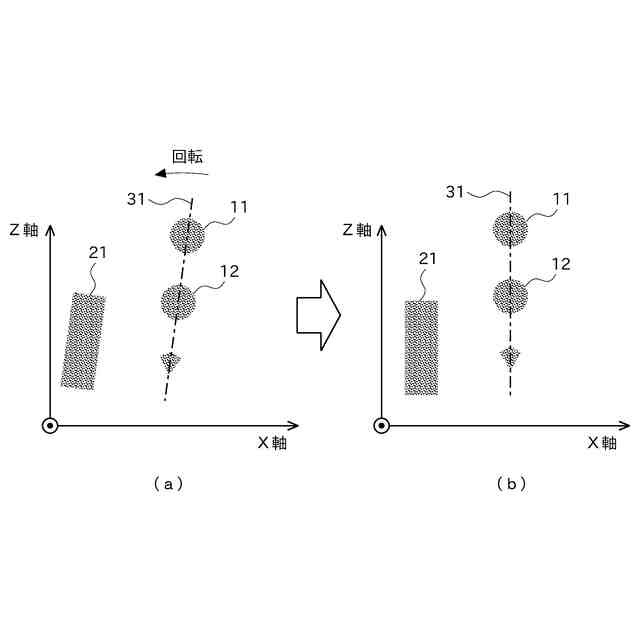
前記球体位置維持手段は、前記第1の球体から前記第2の球体を吊り下げる吊り糸を含み、
前記第1のステップでは、前記第2の球体の吊り下げ時に前記吊り糸と一致する仮想的な線が前記第1の球体及び前記第2の球体の中心を通るように前記治具を前記現実空間内に配置する
ことを特徴とする請求項1記載の3D計測システムにおける基準軸方向算出方法。
【請求項3】
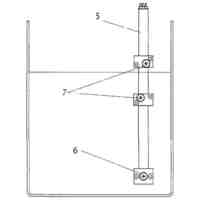
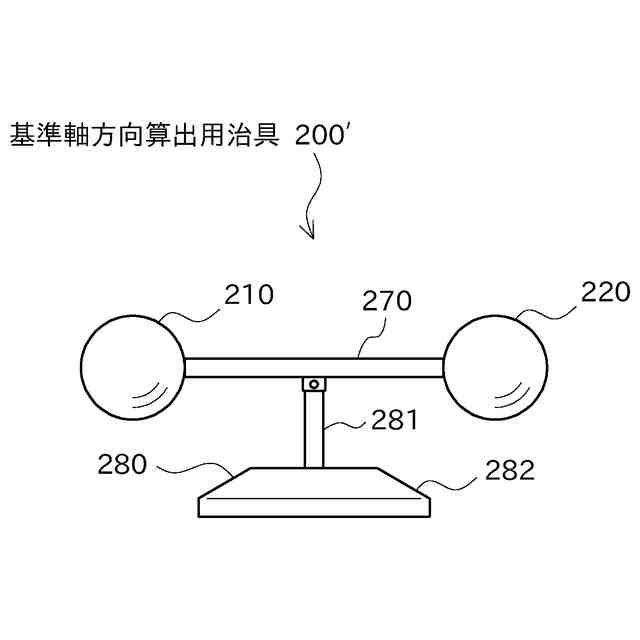
前記球体位置維持手段は、前記第1の球体と前記第2の球体とを相対的な位置を固定した状態で連結するとともに軸線が前記第1の球体及び前記第2の球体の中心を通る棒状部材を含み、
前記第1のステップでは、前記棒状部材が前記現実空間の鉛直方向又は水平方向となるように前記治具を前記現実空間内に配置する
ことを特徴とする請求項1記載の3D計測システムにおける基準軸方向算出方法。
【請求項4】
可搬型の3D計測装置により計測対象を含む現実空間を走査して点群データを取得し、前記点群データから計測対象の3Dデータを生成する3D計測システムであって、
中心から一定半径の球面を有する第1の球体と、中心から一定半径の球面を有する第2の球体と、前記第1の球体と前記第2の球体との相対的な位置を維持する球体位置維持手段と、を備える治具と、
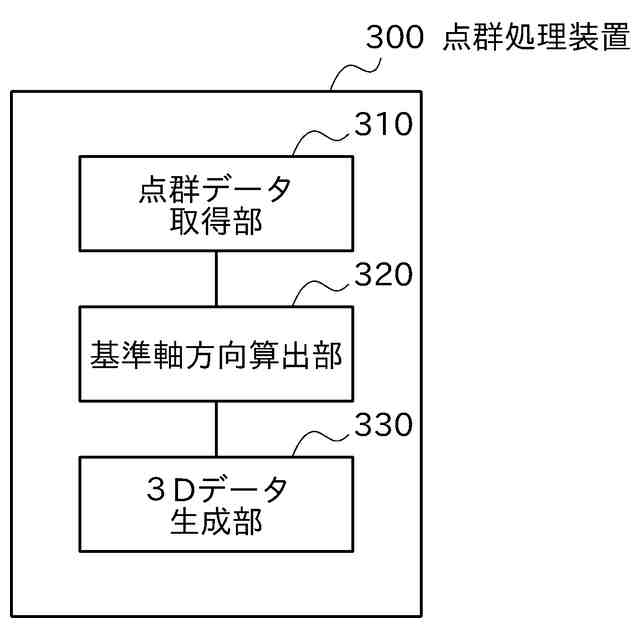
前記3D計測装置により前記現実空間内に配置された前記治具が含まれる点群データを取得する点群データ取得部と、
仮想空間における前記第1の球体の中心と前記第2の球体の中心とを結ぶ仮想的な線の方向を算出して前記仮想空間における基準軸の方向とする基準軸方向算出部とを備えた
ことを特徴とする3D計測システム。
【請求項5】
可搬型の3D計測装置により計測対象を含む現実空間を走査して点群データを取得し、前記点群データから計測対象の3Dデータを生成する3D計測システムにおいて、仮想空間における基準軸の方向を算出する処理で用いられる治具であって、
中心から一定半径の球面を有する第1の球体と、
中心から一定半径の球面を有する第2の球体と、
前記第1の球体と前記第2の球体との相対的な位置を維持する球体位置維持手段と、を備えた
ことを特徴とする3D計測システムにおける基準軸方向算出用治具。
【請求項6】
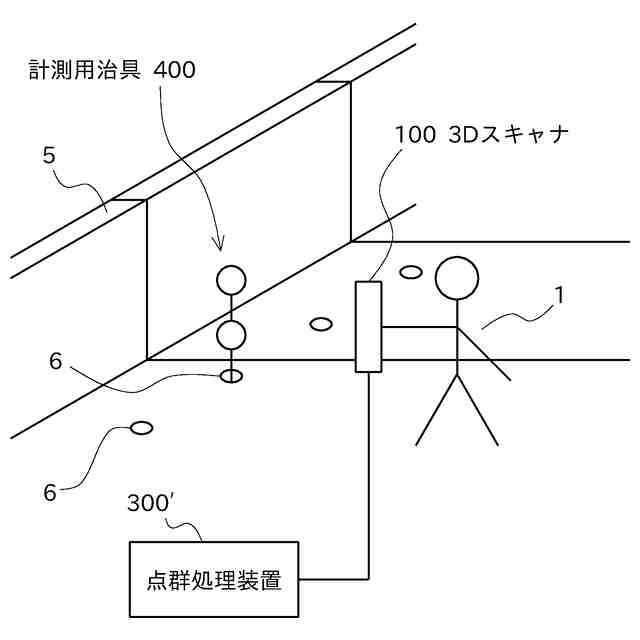
計測対象を含む現実空間を走査して点群データを取得する3D計測装置と、点群データを処理する点群処理装置とを備えた3D計測システムにおいて、前記計測対象に形成され且つ棒状部材が挿入される穴の深さ方向を計測する方法であって、
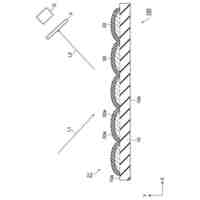
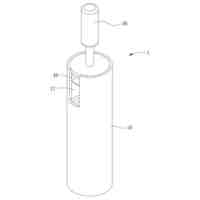
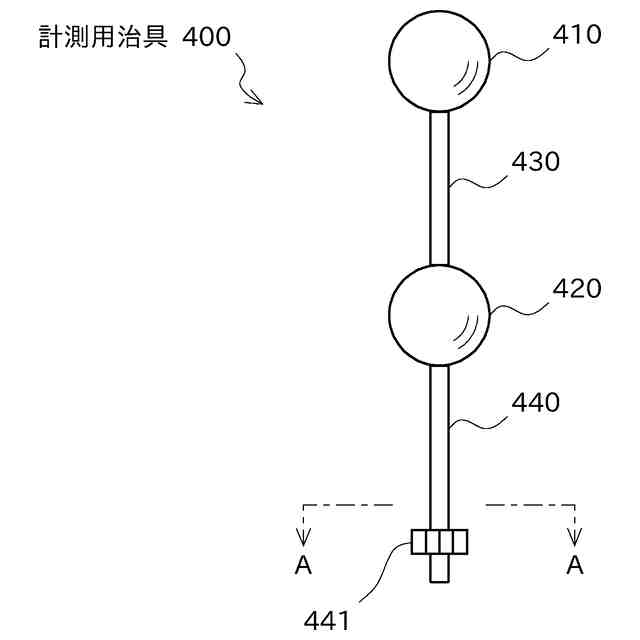
中心から一定半径の球面を有する第1の球体と、中心から一定半径の球面を有する第2の球体と、前記第1の球体と前記第2の球体との相対的な位置を維持する球体位置維持手段と、前記第1の球体の中心と前記第2の球体の中心とを結ぶ仮想的な線と中心軸が平行となるように設けられた棒体と、を備えた治具の前記棒体の端部を、前記計測対象に形成された穴に挿入する第1のステップと、
前記3D計測装置により前記現実空間内に配置された前記治具が含まれる点群データを取得する第2のステップと、
前記点群データ又は前記点群データから生成された3Dデータに基づき前記第1の球体の中心と前記第2の球体の中心とを結ぶ仮想的な線の方向を前記穴の深さ方向として算出する第3のステップとを含む
ことを特徴とする3D計測システムにおける計測方法。
【請求項7】
計測対象を含む現実空間を走査して点群データを取得する3D計測装置を備えた3D計測システムであって、
中心から一定半径の球面を有する第1の球体と、中心から一定半径の球面を有する第2の球体と、前記第1の球体と前記第2の球体との相対的な位置を維持する球体位置維持手段と、前記第1の球体の中心と前記第2の球体の中心とを結ぶ仮想的な線と中心軸が平行となるように設けられた棒体と、を備えた治具と、
前記現実空間内の計測対象に形成され且つ棒状部材が挿入される穴に、前記治具の棒体の端部を挿入した状態で、前記3D計測装置により前記治具が含まれる点群データを取得する点群データ取得部と、
前記点群データ又は前記点群データから生成された3Dデータに基づき前記第1の球体の中心と前記第2の球体の中心とを結ぶ仮想的な線の方向を前記穴の深さ方向として算出する深さ方向算出部とを備えた
ことを特徴とする3D計測システム。
【請求項8】
計測対象を含む現実空間を走査して点群データを取得する3D計測装置と、点群データを処理する点群処理装置とを備えた3D計測システムにおいて、前記計測対象に形成され且つ棒状部材が挿入される穴の深さ方向を計測するために用いられる治具であって、
中心から一定半径の球面を有する第1の球体と、
中心から一定半径の球面を有する第2の球体と、
前記第1の球体と前記第2の球体との相対的な位置を維持する球体位置維持手段と、
前記第1の球体の中心と前記第2の球体の中心とを結ぶ仮想的な線と中心軸が平行となるように設けられた棒体と、を備え、
前記棒体の端部を、前記計測対象に形成され且つ棒状部材が挿入される穴に挿入して使用される
ことを特徴とする3D計測システムにおける計測用治具。
【請求項9】
前記棒体の端部には、前記穴の内壁と当接して前記棒体の前記穴における位置を固定するための位置固定手段が設けられている
ことを特徴とする請求項8記載の3D計測システムにおける計測用治具。
発明の詳細な説明
【技術分野】
【0001】
本発明は、可搬型の3D計測装置を用いて点群データを取得し、前記点群データから計測対象の3Dデータを生成する3D計測システムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
近年、測量の現場において、レーザー3Dスキャナと呼ばれる3D計測装置が普及してきている(特許文献1参照)。レーザー3Dスキャナは、計測対象物との間をレーザーが往復する時間を計測することで距離を計測するとともに、レーザーを照射した方向に基づき、多数の3次元座標からなる点群データを取得する。この点群データはコンピュータに転送され、必要に応じて3Dモデルへの変換が行われ、3DCADやその他のアプリケーションで活用することができる。土木や建築の分野においては三脚を有する設置型のレーザー3Dスキャナが用いられることが多い。
【0003】
しかし、設置型のレーザー3Dスキャナによる測量は、既設の構造物の計測においては以下のような問題点がある。すなわち、既設の構造物の計測においては、計測対象が障害物の邪魔になることが多々あるため、設置型のレーザー3Dスキャナの設置場所が限定されてしまったり、構造物の一部の計測ができなかったりする。このような問題を解決するための1手段としては、既設の構造物の周囲に足場を仮設することが考えられるが、このような作業には多大なコストが必要である。
【0004】
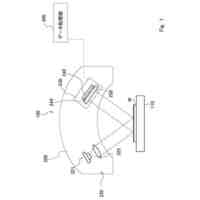
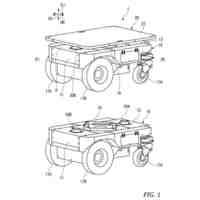
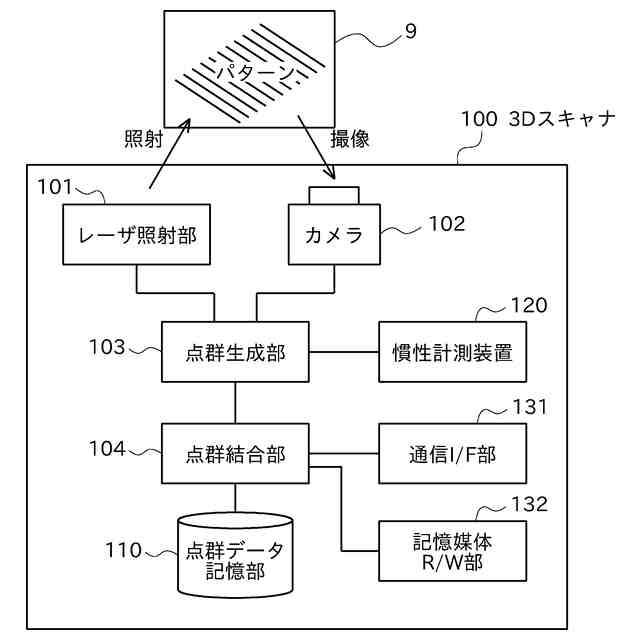
一方、近年は可搬型の3Dスキャナが登場してきている(特許文献2参照)。可搬型の3Dスキャナは、ユーザが携帯する、又は、ドローンと呼ばれる小型の無人航空機(UAV:Unmanned Aerial Vehicle)などの移動手段に搭載して使用される。可搬型の3Dスキャナは、慣性計測装置(IMU:IMU:Inertial Measurement Unit)により自身の位置及び姿勢を認識しており、移動しながら随時スキャンして得られたスキャン毎の点群データを結合することにより、広い計測範囲の点群データを取得することができる。可搬型の3Dスキャナにおいて点群データを算出する原理としては、上述のレーザー3Dスキャナと同様にレーザーの往復時間によるものや、カメラで取得したステレオ画像により算出するもの、レーザープロジェクタで所定パターンの縞画像を投影し、これをカメラで取得した画像により算出したもの、などが挙げられる。
【先行技術文献】
【特許文献】
【0005】
特開2016-045150号公報
特開2022-074298号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、可搬型の3Dスキャナで取得した点群データは精度が十分ではないという問題がある。これは、可搬型の3Dスキャナでは、慣性計測装置により自身の位置及び姿勢を認識しているが、この慣性計測装置の精度が十分でなく、複数のスキャンに係る点群データを結合する際に誤差が累積してしまうためである。このため、結合して得られた点群データの仮想空間と現実空間との間にずれが生じてしまい、点群データに対してどの方向が基準軸方向(例えば鉛直方向)として適切であるかを認識できないという問題がある。例えば、現実空間では正確に鉛直の稜線があったとしても、仮想空間においては鉛直軸から傾いてしまうことがある。
【0007】
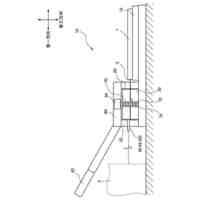
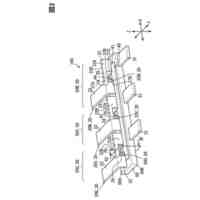
また、一般的に、3Dスキャナによる計測では、構造物の表面から陥没した凹部の構造を正確に計測するには、当該凹部の全体が観察できる場所に当該凹部の底部に向けて計測装置を配置する必要がある。例えば、橋梁の分野においては、コンクリートブロックにアンカーボルトを打ち込むためのアンカーホールを多数形成しており、このアンカーホールの深さ方向(すなわち軸方向)が正確に所定の方向(典型的には鉛直方向)となっているかを計測したい場合がある。この計測を3Dスキャナにより実施するには、アンカーホール毎に計測装置を移動・設置し、1つずつ計測作業を行う必要があるため、作業効率が極めて悪く現実的ではないという問題がある。
【0008】
本発明は上記事情に鑑みてなされたものであり、その第1の目的とするところは、高精度の点群データ又は3Dデータを取得することができる3D計測システム及びその基準軸方向算出方法並びに基準軸方向算出用治具を提供することにある。また、第2の目的とするところは、棒状部材が挿入される穴の深さ方向を計測することができる3D計測システム及びその計測方法並びに計測用治具を提供することにある。
【課題を解決するための手段】
【0009】
上記第1の目的を達成するために、本願発明は、可搬型の3D計測装置により計測対象を含む現実空間を走査して点群データを取得し、前記点群データから計測対象の3Dデータを生成する3D計測システムにおける、仮想空間における基準軸の方向を算出する方法であって、中心から一定半径の球面を有する第1の球体と、中心から一定半径の球面を有する第2の球体と、前記第1の球体と前記第2の球体との相対的な位置を維持する球体位置維持手段と、を備えた治具を、前記現実空間内に配置する第1のステップと、前記3D計測装置により前記現実空間内に配置された前記治具が含まれる点群データを取得する第2のステップと、前記仮想空間における前記第1の球体の中心と前記第2の球体の中心とを結ぶ仮想的な線の方向を算出して前記仮想空間における基準軸の方向とする第3のステップとを含むことを特徴とする。
【0010】
また、上記第1の目的を達成するために、本願発明は、可搬型の3D計測装置により計測対象を含む現実空間を走査して点群データを取得し、前記点群データから計測対象の3Dデータを生成する3D計測システムであって、中心から一定半径の球面を有する第1の球体と、中心から一定半径の球面を有する第2の球体と、前記第1の球体と前記第2の球体との相対的な位置を維持する球体位置維持手段と、を備える治具と、仮想空間における前記3D計測装置により前記現実空間内に配置された前記治具が含まれる点群データを取得する点群データ取得部と、前記第1の球体の中心と前記第2の球体の中心とを結ぶ仮想的な線の方向を算出して前記仮想空間における基準軸の方向とする基準軸方向算出部とを備えたことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
有限会社原製作所
検出回路
18日前
大和製衡株式会社
組合せ秤
4日前
個人
フロートレス液面センサー
11日前
株式会社リコー
光学機器
18日前
キヤノン株式会社
放射線撮像装置
13日前
日本特殊陶業株式会社
ガスセンサ
10日前
ダイハツ工業株式会社
試験用治具
4日前
大同特殊鋼株式会社
座標系較正方法
13日前
株式会社クボタ
作業車
3日前
旭光電機株式会社
漏出検出装置
10日前
大同特殊鋼株式会社
ラベル色特定方法
13日前
株式会社フジキン
流量測定装置
5日前
株式会社アステックス
ラック型負荷装置
11日前
住友化学株式会社
積層基板
10日前
日本製鉄株式会社
評価方法
11日前
株式会社ミツトヨ
非接触表面性状評価装置
12日前
株式会社イシダ
X線検査装置
17日前
株式会社デンソー
電流センサ
10日前
大和ハウス工業株式会社
計測用治具
10日前
SMC株式会社
位置検出センサ
3日前
トヨタ自動車株式会社
異音判定装置
12日前
パイオニア株式会社
評価装置
3日前
日新電機株式会社
検電デバイス
3日前
株式会社日本マイクロニクス
プローブ
5日前
REACT株式会社
移動体
3日前
CKD株式会社
半田検査装置及び半田検査方法
3日前
トヨタ自動車株式会社
方法
3日前
光大科技股分有限公司
検体採取装置
19日前
TDK株式会社
温度センサユニット
5日前
ホシデン株式会社
残量推定システム
11日前
株式会社ザイエンス
呈色方法
18日前
富士通株式会社
測定装置
10日前
株式会社日本マイクロニクス
電気的接続装置
5日前
株式会社IHI
検査装置
4日前
ウェイモ エルエルシー
自律車両の経路変動
18日前
個人
走査型プローブ顕微鏡システム及び検出対象の検出方法
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ